作者团队来自韩国 KAIST 和 DGIST。核心是解决 "ERT 机器人皮肤灵敏度不均" 的问题 ------ 让机器人皮肤不管被按在电极附近还是中间,都能有一样灵敏的反应,从而更准确地感知触觉,保障人机交互安全。
目录
[1. 机器人皮肤的需求背景](#1. 机器人皮肤的需求背景)
[2. 现有技术的局限](#2. 现有技术的局限)
[3. 前人的解决方案不够好](#3. 前人的解决方案不够好)
[二、基础:ERT 机器人皮肤是怎么工作的?](#二、基础:ERT 机器人皮肤是怎么工作的?)
[1. ERT 的核心原理:"正向算电压,反向推按压"](#1. ERT 的核心原理:“正向算电压,反向推按压”)
[2. 传感器的结构和工作机制](#2. 传感器的结构和工作机制)
[3. 空间灵敏度的定义](#3. 空间灵敏度的定义)
[1. 优化思路:"敏感区减贴片,不敏感区加贴片"](#1. 优化思路:“敏感区减贴片,不敏感区加贴片”)
[2. 优化方法:"二进制图 + 两步迭代"](#2. 优化方法:“二进制图 + 两步迭代”)
[1. 迭代过程的变化](#1. 迭代过程的变化)
[2. 二进制图和灵敏度的进化](#2. 二进制图和灵敏度的进化)
[3. 更深的分析:"分辨能力" 提升](#3. 更深的分析:“分辨能力” 提升)
[1. 传感器怎么造出来的?](#1. 传感器怎么造出来的?)
[2. 实验怎么测?](#2. 实验怎么测?)
[3. 实验结果:和模拟一致](#3. 实验结果:和模拟一致)
[1. 核心结论](#1. 核心结论)
[2. 未来要做的](#2. 未来要做的)
一、引言:为什么要做这件事?
1. 机器人皮肤的需求背景
现在机器人越来越多地从工厂(结构化环境)走进生活(家里、医院等非结构化环境),比如帮老人拿东西、和人协作组装零件。这时候需要两个关键能力:不撞伤人 (碰撞安全)和准确感知接触(比如知道手按在哪个位置、用了多大劲),而 "机器人皮肤" 就是实现这两个能力的核心部件。
2. 现有技术的局限
之前做机器人皮肤常用两种方法:
- 「阵列索引」:像贴很多小传感器(比如压敏电阻),缺点是布线复杂、大面积成本高;
- 「模块化」:把皮肤分成小块拼接,缺点是拼接处灵敏度可能断层。
后来出现了ERT 技术(电阻层析成像),它的优势很突出
- 只用少量电极(比如文章里的 4×4 电极)就能监测大面积;
- 可弯曲、布线简单、抗碰撞(适合机器人全身覆盖)。
但 ERT 有个致命问题:空间灵敏度不均 。因为电极通电后会产生 "边缘效应"------ 电场线在电极附近挤得很密(电流密度高),所以电极附近一按就有强信号(敏感);而中间区域电场线很疏(电流密度低),按了信号很弱(不敏感)。这会导致机器人 "摸不准":按电极旁边觉得 "很用力",按中间觉得 "没用力",严重影响触觉判断。
3. 前人的解决方案不够好
- 「软件补偿」:通过算法校准灵敏度,但只针对几个特定点,没法覆盖整个皮肤;
- 「硬件优化」:调整电极位置,但电极附近还是太敏感,没法做到完全均匀。
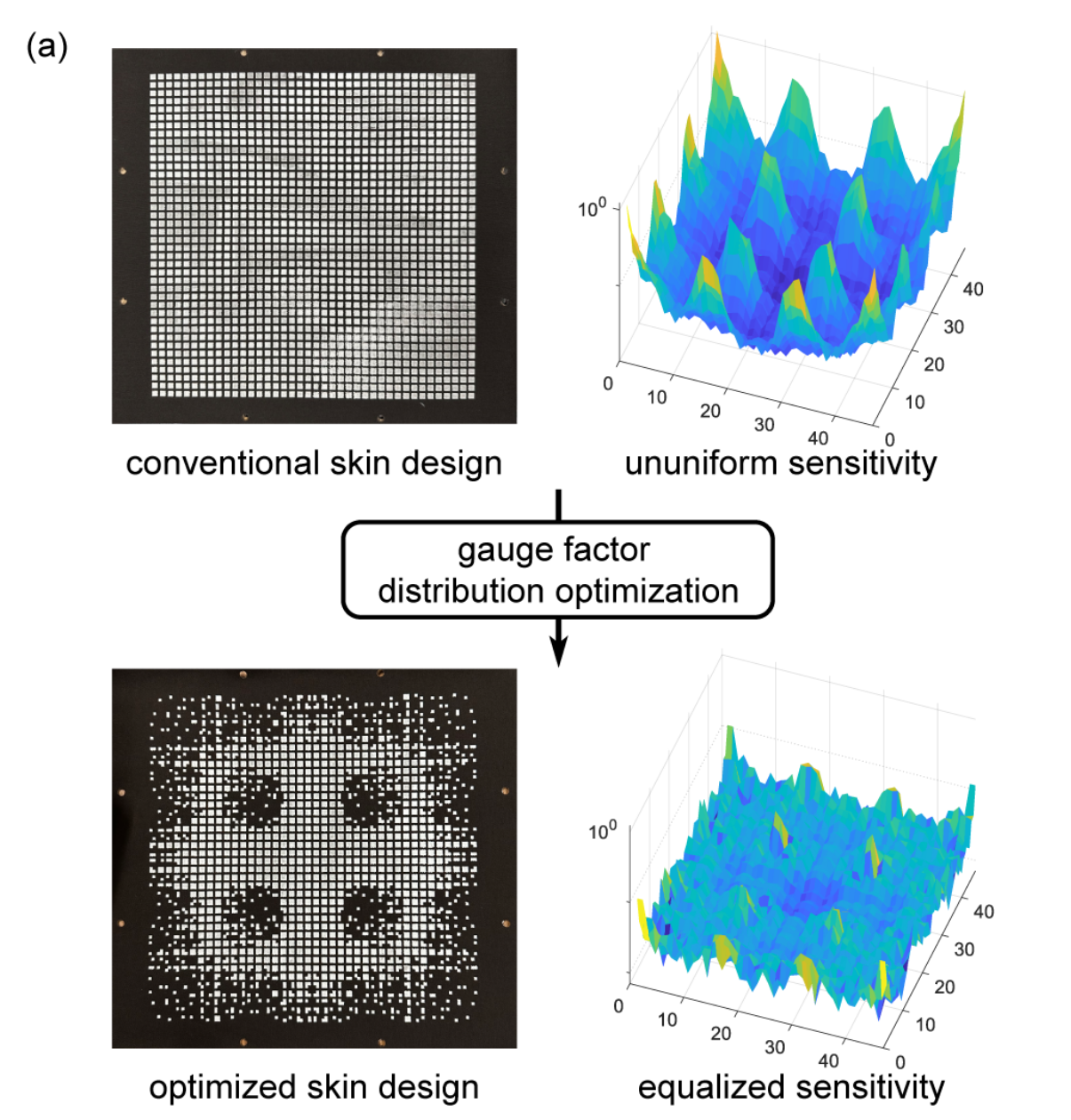
所以作者提出了新方法:通过优化 "导电贴片的密度" 来均衡灵敏度------ 电极附近(敏感区)少放导电贴片,中间(不敏感区)多放 / 保留贴片,再用 "拓扑优化" 让这个过程更精准是优化后的皮肤层设计,(b) 是灵敏度均匀后,触觉重建的效果更准)。
二、基础:ERT 机器人皮肤是怎么工作的?
要理解优化方法,先得知道皮肤的 "底层逻辑"。
1. ERT 的核心原理:"正向算电压,反向推按压"
ERT 本质是 "通过电信号反推触觉",分两步:
- 正向问题:已知传感器的电导率分布,算电流通过时会产生什么电压变化(用麦克斯韦电磁方程 + 有限元法 FEM,得到一个 "Jacobian 矩阵" 来描述电导率和电压的关系)。通俗说:"预先算好'电流流过传感器的某个位置,会输出多少电压'的规律"。
- 反向问题:实际使用时,测到电压变化,反推哪里被按压(因为电导率会随按压变化)。但这个问题是 "病态的"------ 一个电压变化可能对应多个按压位置,所以需要用 "Tikhonov 正则化" 加约束,让结果唯一。通俗说:"测到电压信号后,根据预先算好的规律,反推'到底是哪个位置被按了'"。
2. 传感器的结构和工作机制
文章里的传感器是 "多层结构":
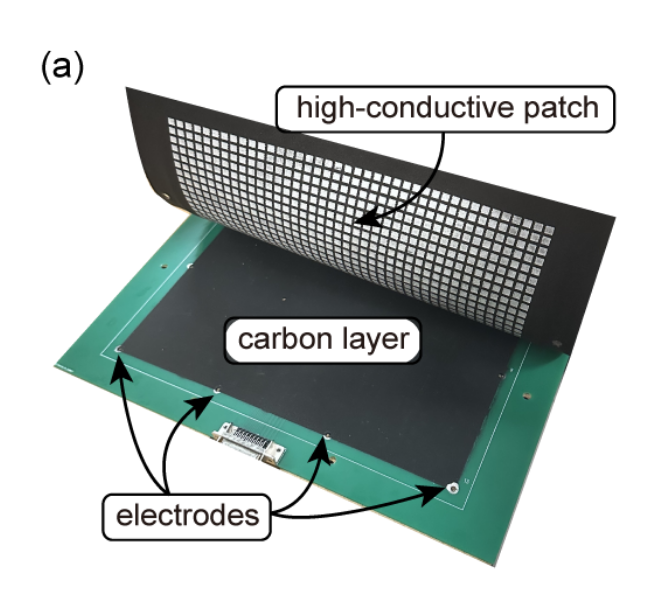
- 基层:低导电材料(喷了炭黑漆的 PCB 板),上面按 4×4 网格放了 16 个电极,每个电极间距 80mm;
- 皮肤层:高导电贴片(银浆做的,2×2mm 大小)+ 非导电格子(像 "棋盘",格子里是贴片,格子外不导电);
- 顶层:4T 氯丁橡胶(软的,保护内部结构,同时传递压力)。
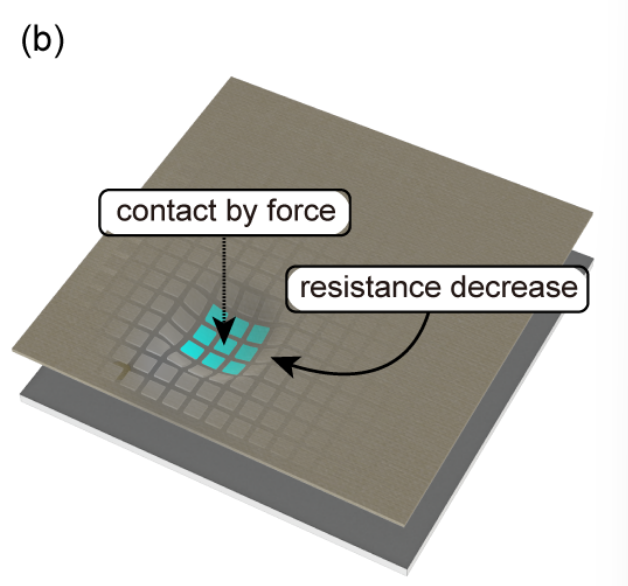
工作时的 :当你按压皮肤时,顶层把力传到皮肤层,高导电贴片会接触到底层的低导电材料,导致 "局部电阻降低"------ERT 就是通过检测这种 "电阻变化(电导率变化)",来判断 "哪里被按了、按了多大劲"。
3. 空间灵敏度的定义
文章里把 "灵敏度" 定义为:"按压一个特定区域时,传感器输出的电压变化的强弱"(用 L2 范数计算)。通俗说:"灵敏度就是'按一下'的'信号响应'------ 响应强 = 灵敏,响应弱 = 不灵敏"。
三、核心:怎么优化灵敏度?
这是文章的创新点核心,简单说就是 "针对性调整导电贴片密度",再用 "拓扑优化" 让这个过程更高效。
1. 优化思路:"敏感区减贴片,不敏感区加贴片"
因为 "边缘效应" 导致:
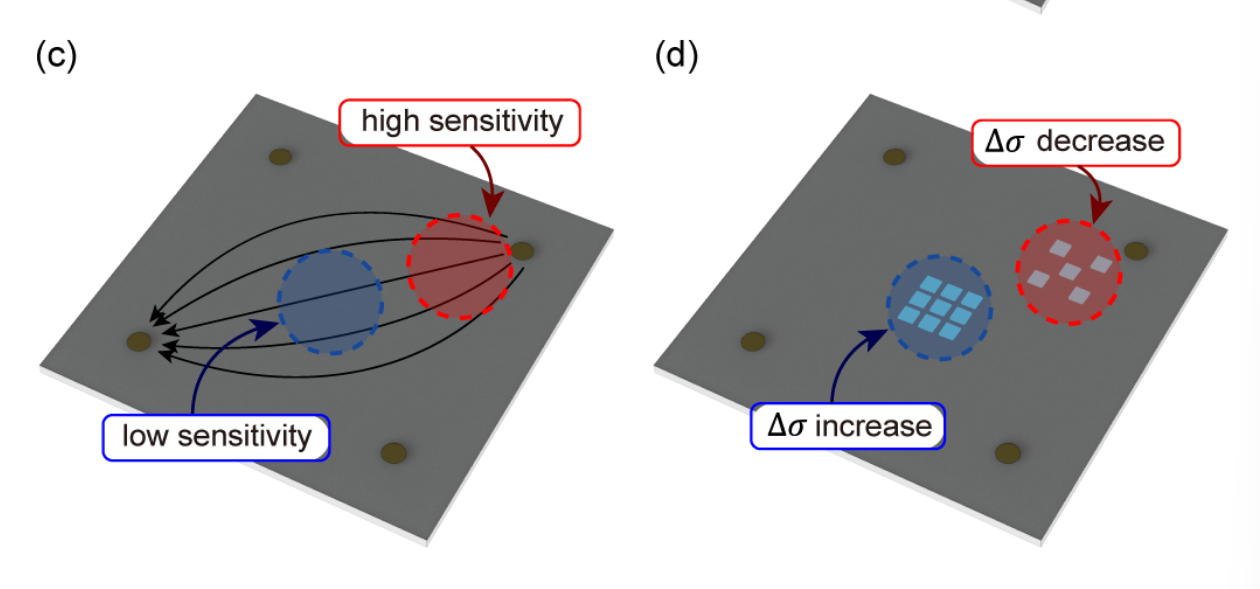
- 电极附近:电流密度高→灵敏度高→需要减少导电贴片密度(降低 "应变系数",让信号弱一点);
- 中间区域:电流密度低→灵敏度低→需要增加 / 保留导电贴片密度(提高 "应变系数",让信号强一点)。
这里的 "应变系数(Gauge Factor)" 可以理解为 "传感器对压力的'反应系数'"------ 系数大,一点压力就有强信号;系数小,压力大信号也弱。
2. 优化方法:"二进制图 + 两步迭代"
为了让优化更精准,作者用了 "有限元模拟 + 二进制图像" 的组合:
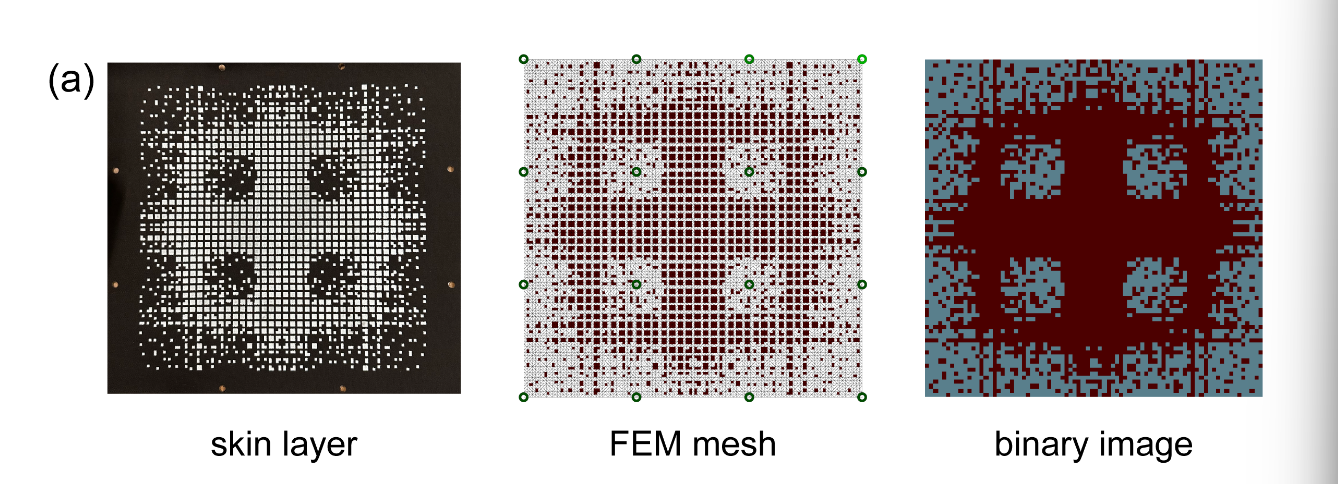
- 用二进制图表示导电贴片:把皮肤层转换成 80×80 的像素图(每个像素对应一个 2×2mm 的导电贴片),"1" 表示有贴片,"0" 表示没有贴片。这样就能用 "像素的增减" 来控制贴片密度,计算量比直接用 FEM 网格小很多。
- 优化目标:最小化 "灵敏度的标准差"------ 标准差越小,灵敏度越均匀(比如全班同学成绩的标准差小,说明大家分数差不多)。
优化分两步迭代,直到灵敏度均匀:
- 评估灵敏度:在整个传感器上按 47×47 的网格点(每 5mm 一个点),每个点用 10×10mm 的压头按压(比 FEM 网格的最小单位大,确保能覆盖整个区域),测电压变化算灵敏度;
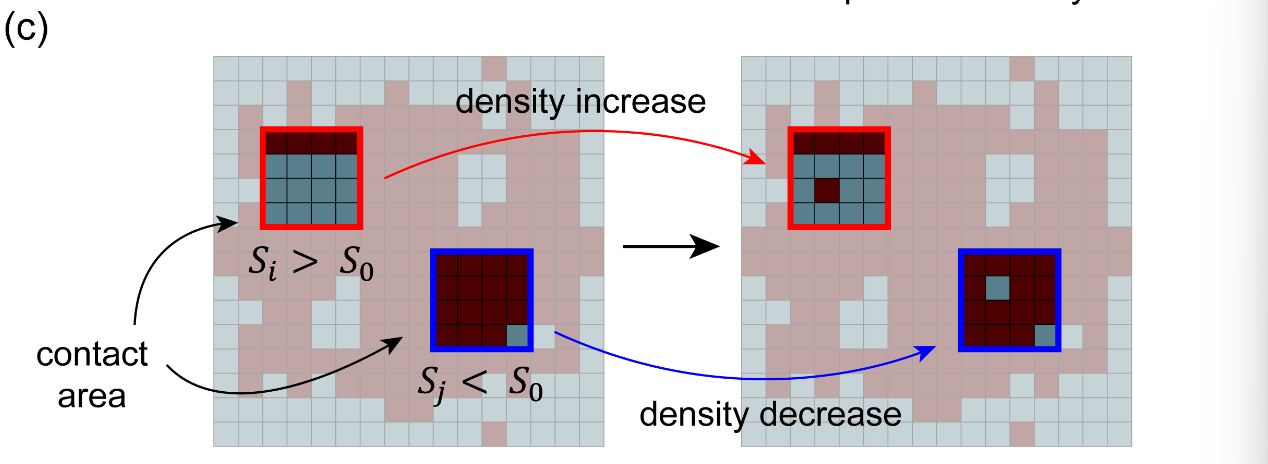
- 调整贴片密度 :
- 先设一个 "目标灵敏度 S0":取传统设计中 "最低的灵敏度"(也就是中间区域的灵敏度);
- 对每个按压区:如果灵敏度>S0(敏感区),就把二进制图里的 "1" 改成 "0"(减贴片);如果灵敏度<S0(不敏感区),就把 "0" 改成 "1"(加贴片);
- 为了避免 "局部最优"(比如某个区域一直调不好),作者用了改进的 BESO 算法:每次迭代只随机改 1 个像素,10% 概率不改,还约束 "不能让某个按压区全是 0"(避免出现 "盲点"------ 按了没反应)。
四、优化结果:真的变均匀了吗?
作者通过模拟验证了优化效果,核心看 "三个指标":灵敏度的标准差(越小越好)、均值、最大 / 最小比值(越小越好)。
1. 迭代过程的变化
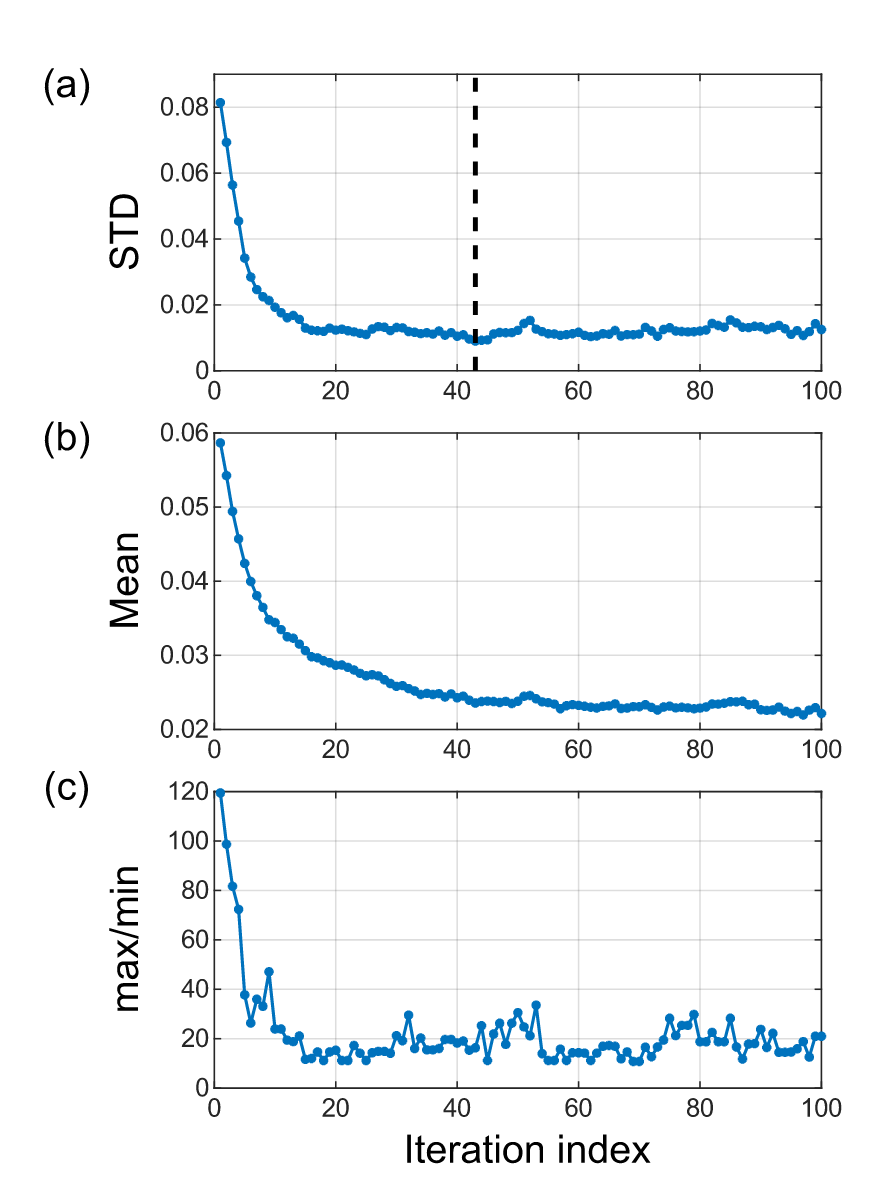
随着迭代次数增加(最多 100 次):
- 标准差(图 4 (a))从 0.08 降到 0.009,降了 9 倍;
- 最大 / 最小比值(图 4 (c))从 119.45 降到 16.32,降了 7.32 倍;
- 40 次迭代后指标收敛,作者选了第 43 次的设计(之后会因为随机调整出现波动)。
2. 二进制图和灵敏度的进化
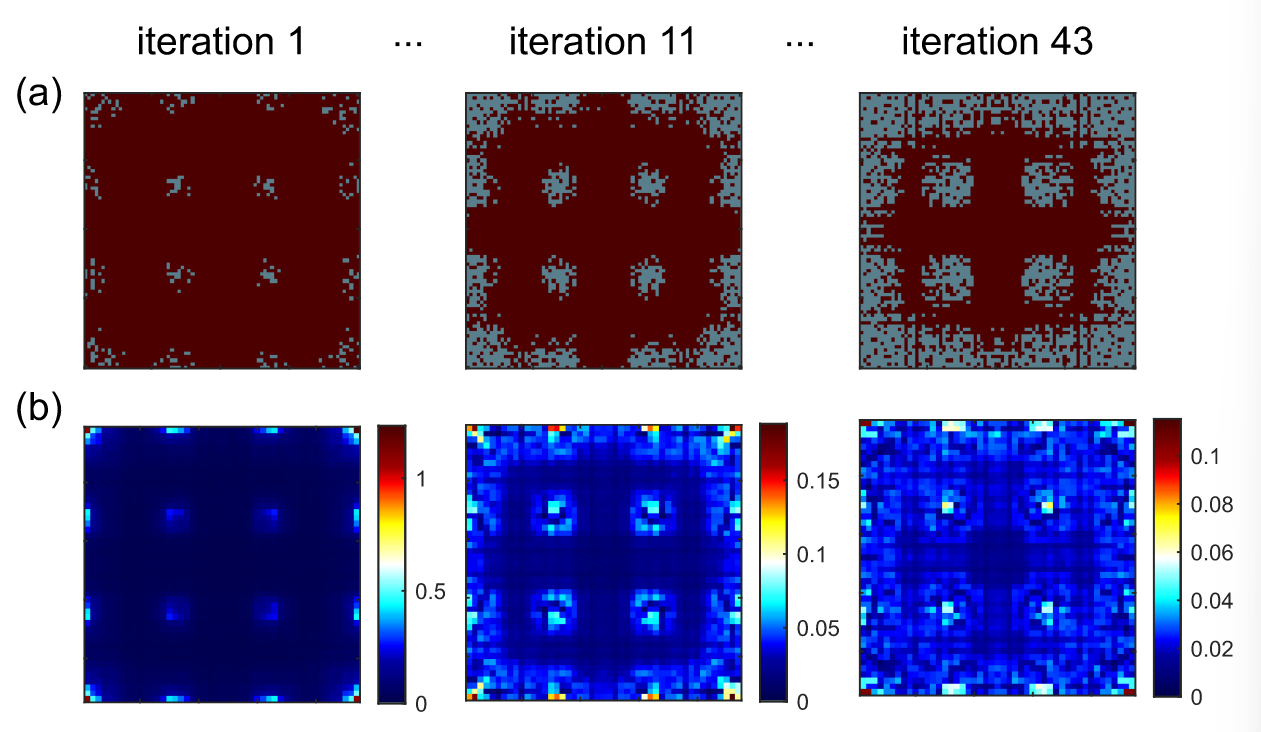
从左到右是迭代 1 次、11 次、43 次的效果:
- 二进制图(图 5 (a)):电极附近的 "红色像素(有贴片)" 越来越少(密度降低),中间区域基本不变(密度保留);
- 灵敏度分布(图 5 (b)):一开始电极附近 "很亮(敏感)",中间 "很暗(不敏感)",迭代后整个区域亮度均匀(灵敏度一致)。
3. 更深的分析:"分辨能力" 提升
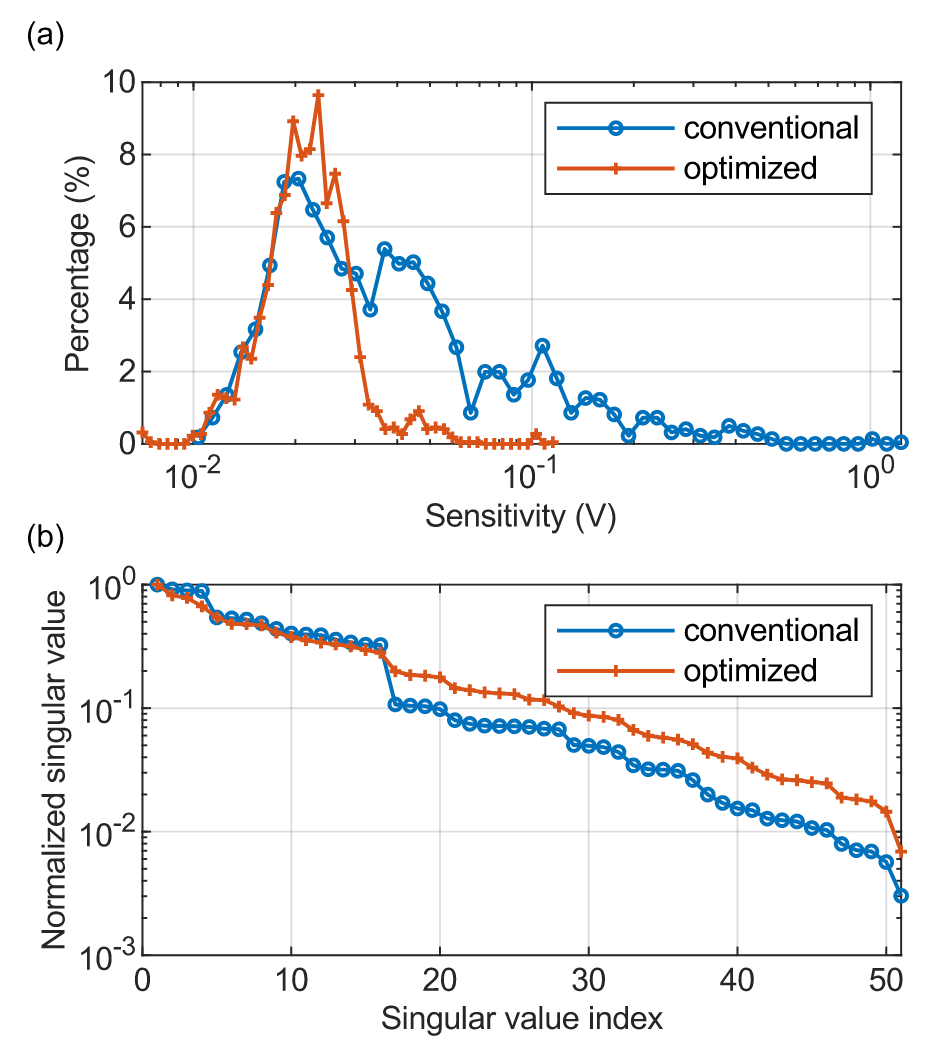
- 灵敏度直方图(图 6 (a)):传统设计的灵敏度分布很宽(从 0.01 到 0.15),优化后很集中(主要在 0.02 左右),说明均匀性大幅提升;
- 奇异值分析(图 6 (b)):奇异值反映 "反向问题的可解性"------ 奇异值越高、越均匀,说明 "从电压反推按压位置" 的能力越强。优化后的奇异值明显更高,且分布更均匀,意味着机器人 "摸得更准"。
五、实验验证:模拟结果靠谱吗?
1. 传感器怎么造出来的?
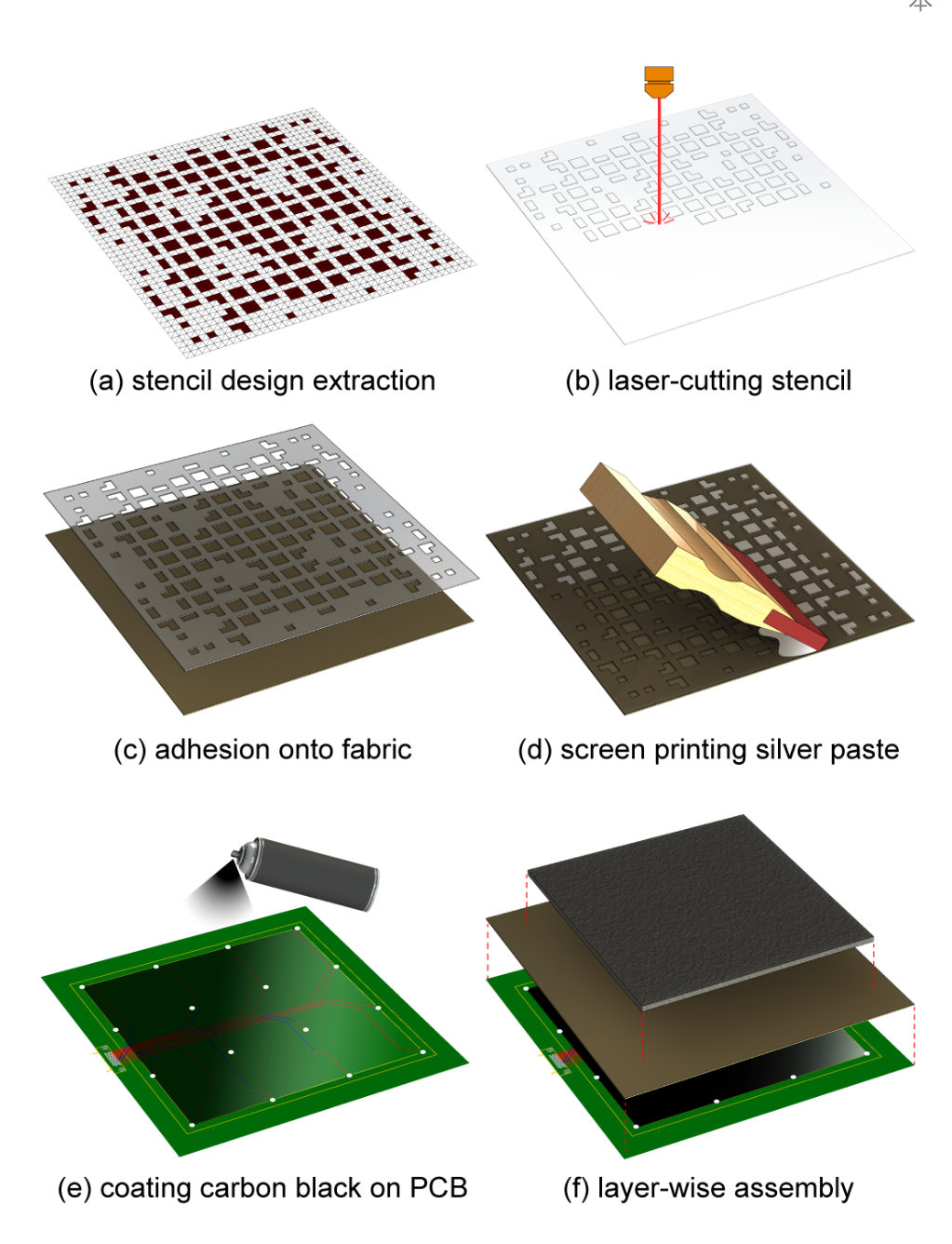
关键是做出 "优化后的导电贴片图案"(因为图案复杂,用丝网印刷):
- 从 FEM 模型里提取 "非导电区" 的形状,激光切割聚酯薄膜做 "模板";
- 把模板贴在非导电布上,用丝网印刷把银浆(高导电)印上去(模板挡住的地方没有银浆,就是非导电区);
- 基层喷上炭黑漆(低导电),再把皮肤层和基层粘起来,顶层贴氯丁橡胶 ------ 传感器就做好了。
2. 实验怎么测?
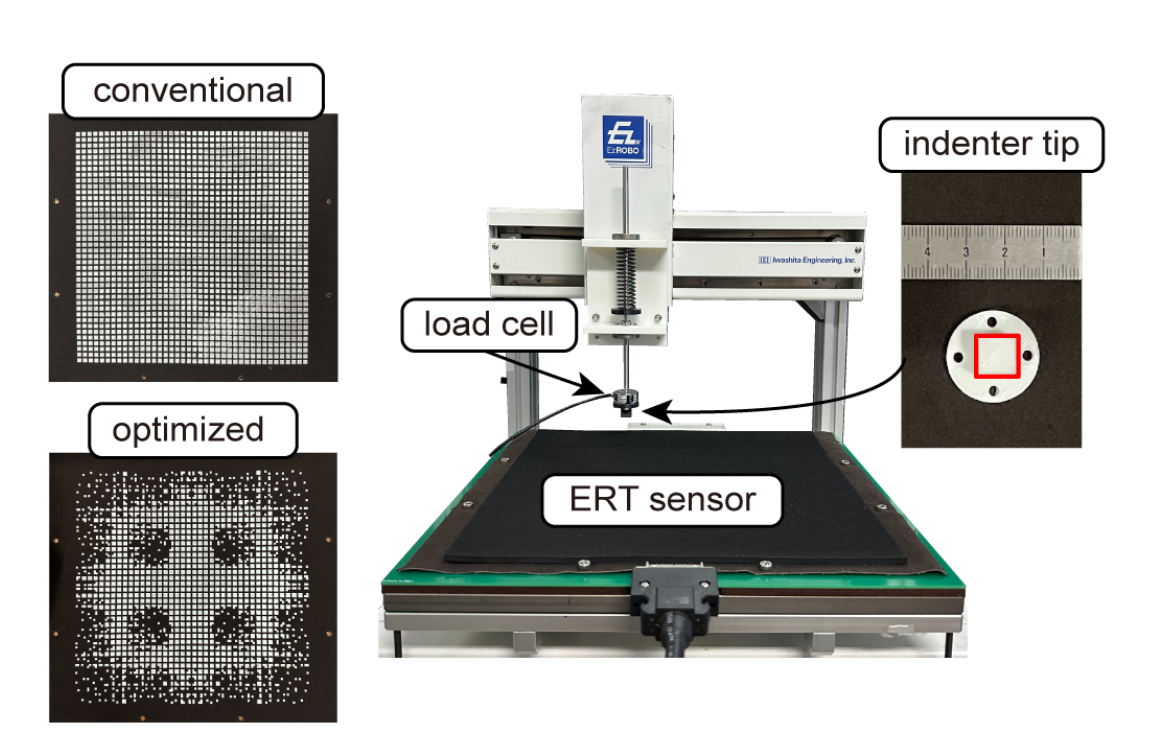
用 "三轴龙门系统"(EzRobo-5GX)做 "按压实验":
- 压头是 10×10mm 的方形(和模拟一致),每次按 10N 的力(用测力传感器控制力度);
- 在传感器上按 24×24 的网格点(每 10mm 一个点),测每个点的灵敏度。
3. 实验结果:和模拟一致
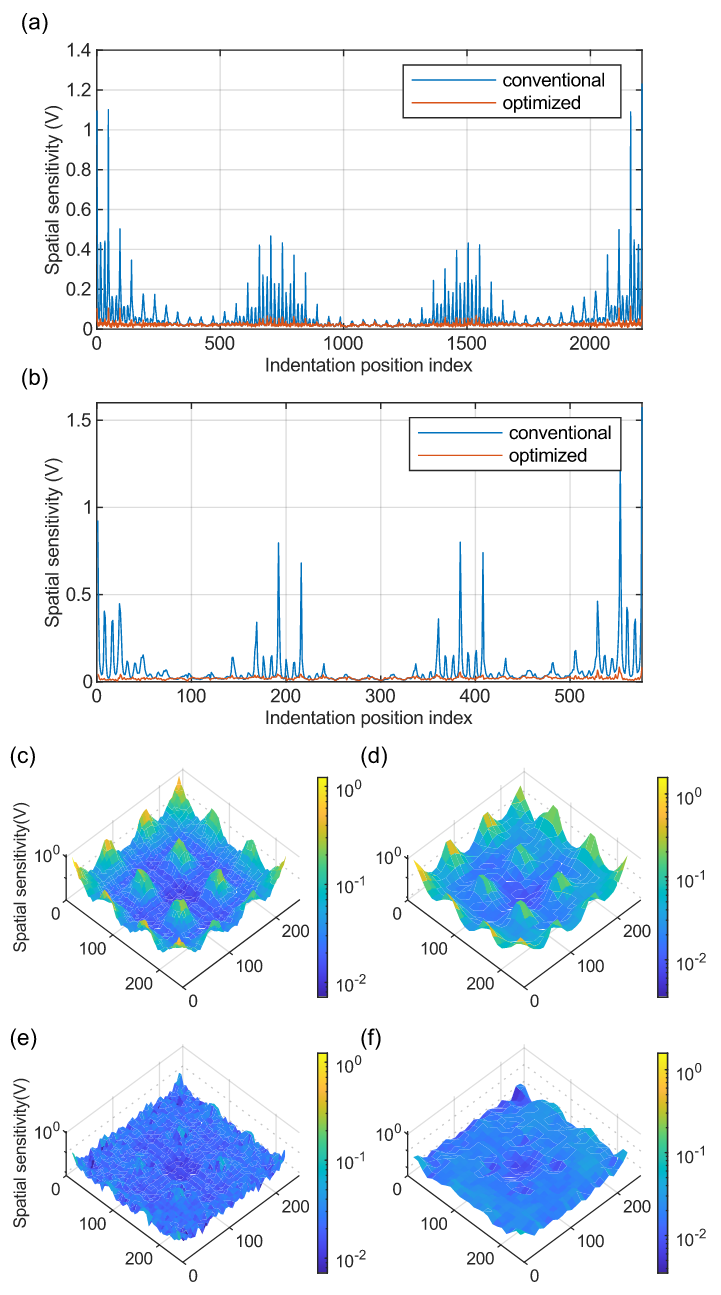
图 9 左边是模拟结果,右边是实物结果:
- 传统传感器(图 9 (c)(e)):电极附近 "亮(敏感)",中间 "暗(不敏感)",灵敏度差异大;
- 优化传感器(图 9 (d)(f)):整个区域亮度均匀,灵敏度差异小。
数据对比更直观:
| 指标 | 传统传感器 | 优化传感器 | 提升倍数 |
|---|---|---|---|
| 灵敏度标准差 | 0.1297 | 0.0083 | 15.63 倍 |
| 最大 / 最小比 | 201.67 | 23.76 | 8.49 倍 |
作者也提到了不足:目前 10×10mm 的接触区还不够大,没法做到 "完全均匀"------ 未来需要调整接触区大小和电极密度。
六、结论与未来方向
1. 核心结论
作者提出的 "通过拓扑优化调整导电贴片密度" 的方法,成功解决了 ERT 机器人皮肤的灵敏度不均问题:
- 模拟中:灵敏度标准差降 9 倍,最大 / 最小比降 7.32 倍;
- 实物中:标准差降 15.63 倍,最大 / 最小比降 8.49 倍;
- 同时提升了 "反向问题的可解性"(奇异值分析),让机器人更能 "摸准" 触觉。
2. 未来要做的
- 优化 "接触区大小" 和 "单位面积电极数" 的关系,实现完全均匀的灵敏度;
- 在实际人机交互场景中测试(比如机器人和人握手、拿东西),验证优化后的皮肤是否真的能提升安全性和准确性。
核心创新点总结
- 方法创新:首次通过 "调整导电贴片密度" 来调制应变系数,针对性解决边缘效应 ------ 敏感区减密度、不敏感区增密度,从硬件层面实现全局灵敏度均衡;
- 优化创新:用 "二进制图像 + 改进 BESO 算法" 做拓扑优化,既降低了计算量,又避免了局部最优,还防止出现 "触觉盲点";
- 实现创新:用丝网印刷技术做出复杂的导电贴片图案,把模拟结果落地成实物,验证了方法的可行性;
- 性能创新:不仅均衡了灵敏度,还通过奇异值分析证明 "触觉分辨能力" 提升,为 ERT 机器人皮肤的实际应用(人机交互)打下基础。