液位测量是工业生产(如化工储罐、食品饮料灌装)与实验分析中的常见需求,利用 LabVIEW 的IMAQ Find Straight Edges 3 VI可实现非接触式、高精度的液位检测。其核心原理是通过识别液体表面与容器壁的交界直线边缘,转化为实际液位高度,具有抗干扰性强、响应速度快的优势。
液位检测
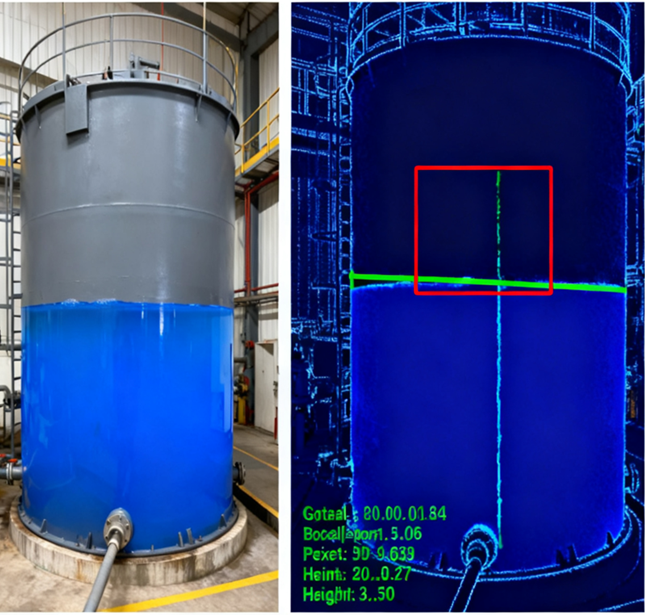
液位的视觉特征符合直线边缘检测的适用条件:液体表面(如水面、油面)与容器内壁或背景形成明显的灰度交界,且在垂直于重力方向上呈现直线特征(忽略微小波动时)。IMAQFind Straight Edges 3 VI可精准捕捉这一交界边缘,具体适配点包括:
-
边缘极性明确:液体与空气(或容器)的灰度差异稳定(如透明液体在深色容器中呈现 "亮→暗" 或 "暗→亮" 的阶跃变化),可通过 "Edge Polarity" 参数定向筛选;
-
直线特征显著:液位在静态或低流速下近似直线,符合 "Line Options" 中直线拟合的算法要求;
-
区域可控:通过 ROI 设置可聚焦容器的液位观测区域,排除容器外背景干扰。
液位测量流程
以化工储罐液位在线监测为例,具体步骤如下:
1. 硬件与图像采集
-
硬件配置:工业相机(安装于储罐侧面观测窗正前方)、LED 背光源(增强液位边缘对比度);
-
图像预处理:通过 LabVIEW 的 IMAQ 模块进行图像灰度化、降噪(如 "Median" 滤波),消除反光或气泡导致的局部噪声。
2. ROI 与参数配置
-
ROI 设置:划定容器内液位可能波动的垂直区域(如矩形 ROI,高度覆盖储罐量程,宽度略窄于容器内径),减少无效计算;
-
核心参数配置:
-
-
边缘选项:选择 "Rising Edges" 或 "Falling Edges"(根据液体与容器的灰度对比,例如透明液体在黑色容器中呈现 "暗→亮" 的上升沿);"Kernel Size=3"(平衡噪声抑制与边缘锐度);"Minimum Edge Strength=15"(过滤液体表面微小波纹的弱边缘);
-
搜索方向:设为 "Top to Bottom"(沿容器高度方向扫描,匹配液位垂直变化特性);
-
直线选项:"Number of Lines=1"(单条液位线);"Type=Best Edge Projection"(优先提取最强边缘,适应液位轻微波动);"Orientation=0"(假设液位水平,允许 "Angle Range=5" 应对微小倾斜)。
-
3. 液位计算与输出
-
从 "Straight Edges" 输出中提取液位线的 "Point1 (Pixel)" 或 "Point2 (Pixel)" 坐标,取垂直方向(Y 轴)像素值;
-
结合图像标定参数(像素 - 毫米转换系数,通过已知高度的标定物预先获取),将像素坐标转换为实际液位高度;
-
通过 LabVIEW 的 DAQ 模块或网络通信,将液位数据实时传输至控制系统,实现超阈值报警或自动调节。
使用技巧
- 应对液位波动:
若液体存在轻微波动(如搅拌过程),可启用 "Data ProcessingMethod=Median"(中值滤波),或增大 "Width" 参数(如设为 5),平滑边缘轮廓以减少波动干扰;
- 消除反光干扰:
若容器壁反光导致虚假边缘,可在 "Edge Options" 中提高 "Minimum Edge Strength",或通过 "Edge Polarity" 限定边缘类型(如仅保留 "Falling Edges");
- 提升检测速度:
启用 "OptimizedMode=TRUE"(关闭梯度值输出),并将 ROI 压缩至液位可能出现的最小范围(如仅监测量程的 80% 区域),使检测帧率提升至 30fps 以上,满足实时性要求。
总结
IMAQ Find Straight Edges 3 VI为液位测量提供了高效的视觉解决方案,通过针对性配置边缘检测参数与 ROI 区域,可在复杂工业环境中实现非接触式、高精度的液位监测。相比传统的浮子式、超声波等方法,该方案具有抗腐蚀(无需接触液体)、响应快(毫秒级检测)、易集成(直接与 LabVIEW 控制系统联动)等优势,广泛适用于食品、化工、制药等行业的液位管控场景。