2022 CVPR
论文:GroupNet: Multiscale Hypergraph Neural Networks for Trajectory Prediction with Relational Reasoning
1、介绍
过去的工作只考虑了有限关系推理的成对交互,因此提出了GroupNet,可以通过可训练的多尺度超图,用于对具有多个不同大小的群体交互进行建模,以数据驱动的方式学习这种多尺度超图拓扑,来提取更全面更群体化的交互;在学习时,为了学习交互embedding,提出三要素格式:神经交互强度、神经交互类别和每个类别函数
至少三个因素会影响智能体动态:
自我动量:已得到充分研究
瞬时意图:不可研究(MTR系列已经实现瞬时意图的学习)
社会交互:当前工作重点
2、GroupNet
GroupNet的核心是学习一个多尺度超图,其节点是智能体,超边是交互
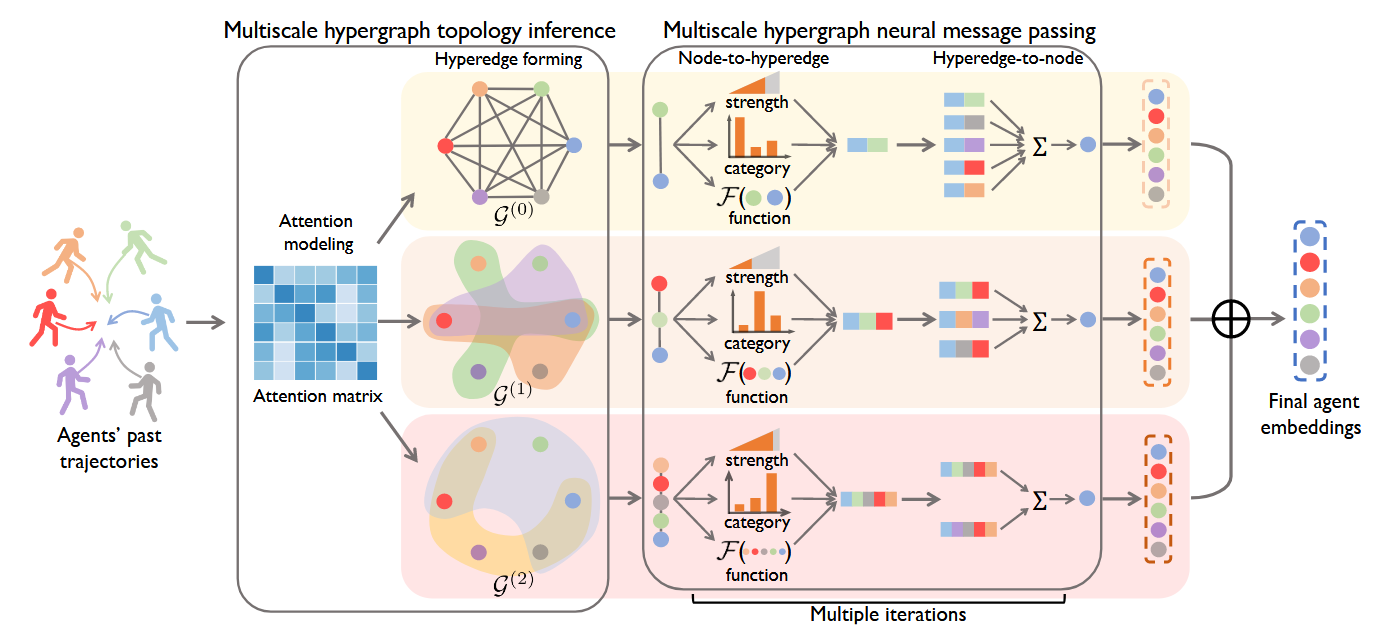
详情可见DynGroupNet,当然在DynGroupNet中有所创新,具体是在平滑相关矩阵的变化处,但基本核心思想不变
神经网络信息传递也相同,最后得到智能体的embedding
3、GroupNet预测系统
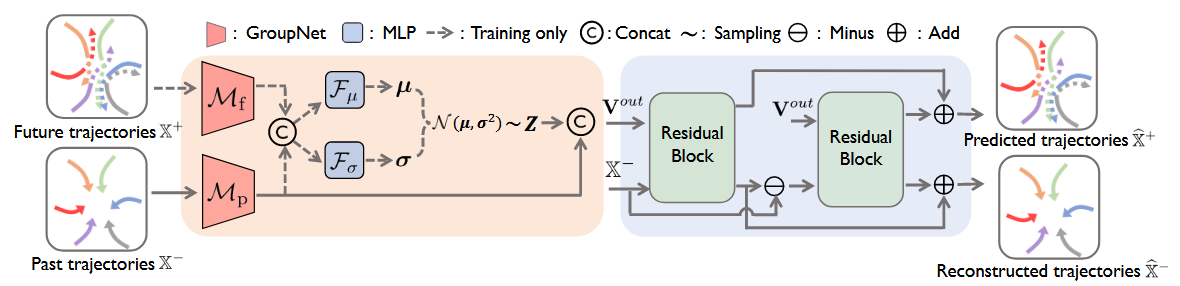
3.1、编码阶段
首先将过去轨迹X-和未来轨迹X+分别输入给GroupNet,得到智能体未来和过去的embedding------V+和V-
将两个embedding连接后,分别通过两个MLP,得到未来轨迹分布的期望和方差,从该分布中采样得到潜变量z,和V-连接后输出为V_out
而在测试阶段,则从先验分布N~(0, λI)中采样,其中λ为一个超参数
3.2、解码阶段
残差解码器包含两个相同的解码快,输入V_out和X-(重建过去轨迹,避免信息丢失)
每个块由一个用于编码序列的 GRU 编码器和两个作为输出的 MLP 组成
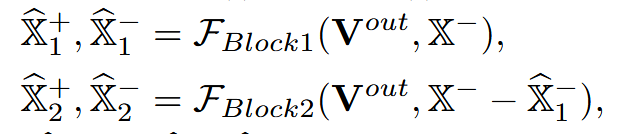
最后再求和得到未来预测轨迹和重建过去轨迹

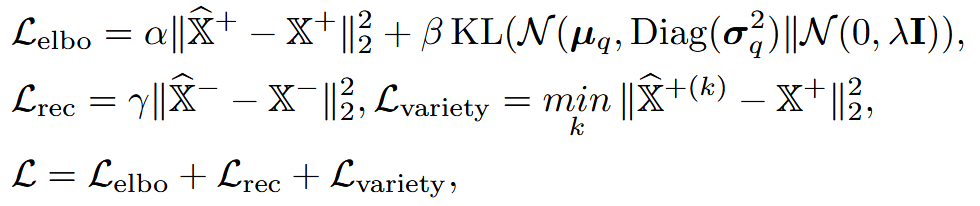
3.3、损失函数
损失由L2范数损失,KL散度损失,和多样性损失构成