目录
[一、自行车模型结构(Bicycle Model)](#一、自行车模型结构(Bicycle Model))
[二、速度分解 ------ 最关键的一步](#二、速度分解 —— 最关键的一步)
[三、无侧滑约束(No-Slip Constraint)](#三、无侧滑约束(No-Slip Constraint))
[四、角速度推导(Yaw Rate)](#四、角速度推导(Yaw Rate))
[六、最终连续时间模型(Continuous Model)](#六、最终连续时间模型(Continuous Model))
[七、扩展输入:用加速度 & 转角速度作为控制量(工程常用)](#七、扩展输入:用加速度 & 转角速度作为控制量(工程常用))
[2)为什么控制输入不是 δ 而是 δ˙](#2)为什么控制输入不是 δ 而是 δ˙)
[3)更工程的解释:转角速度 = 转向电机的目标速度](#3)更工程的解释:转角速度 = 转向电机的目标速度)
[八、离散化(用于 MPC / 仿真 / 代码实现)](#八、离散化(用于 MPC / 仿真 / 代码实现))
[九、小角度线性化(用于 LQR、线性 MPC)](#九、小角度线性化(用于 LQR、线性 MPC))
[2)离散时间模型(MPC 直接可用):](#2)离散时间模型(MPC 直接可用):)
[3)小角度线性化(用于 LQR)](#3)小角度线性化(用于 LQR))
[十一、 适用范围](#十一、 适用范围)
模型推导
在之前的章节里,我已经把 MPC 的核心数学结构推到了一遍:
离散模型 → 预测矩阵 X=Fxk+GU → 构造代价函数 → 变成一个标准二次规划(QP)问题
以及对约束的设定和QP求解器的运用进行的详细的讲解
具体文章见下:
MPC模型预测控制原理全解析:从状态预测、矩阵推导到QP求解与滚动优化(含完整手推过程)-CSDN博客![]() https://blog.csdn.net/m0_58954356/article/details/154781300?spm=1001.2014.3001.5501MPC 里的约束与 QP 求解器实战------从原理、例子到 C++ 落地-CSDN博客
https://blog.csdn.net/m0_58954356/article/details/154781300?spm=1001.2014.3001.5501MPC 里的约束与 QP 求解器实战------从原理、例子到 C++ 落地-CSDN博客![]() https://blog.csdn.net/m0_58954356/article/details/154830088?spm=1001.2014.3001.5501MPC模型预测控制:从基本概念到数学推导(基于 DR_CAN 课堂笔记整理)-CSDN博客
https://blog.csdn.net/m0_58954356/article/details/154830088?spm=1001.2014.3001.5501MPC模型预测控制:从基本概念到数学推导(基于 DR_CAN 课堂笔记整理)-CSDN博客![]() https://blog.csdn.net/m0_58954356/article/details/154800788?spm=1001.2014.3001.5501
https://blog.csdn.net/m0_58954356/article/details/154800788?spm=1001.2014.3001.5501
前言
运动学模型(Kinematic Bicycle Model)是自动驾驶中最常用的底层模型之一,它是如下算法的基础:
-
MPC(Model Predictive Control)
-
LQR 路径跟踪
-
Stanley / Pure Pursuit
-
Frenet 轨迹规划
-
Kalman Filter / 状态估计
-
AGV 前方单舵轮控制
然而,大多数资料只给出三行公式:

却没有讲清楚它们的来源、意义、适用范围以及工程化写法。
本文将一次讲透:
从几何 → 速度分解 → 无侧滑约束 → 世界系转换 → 离散化 → 工程实现 → AGV 单舵轮版本。
让你彻底搞懂运动学模型。
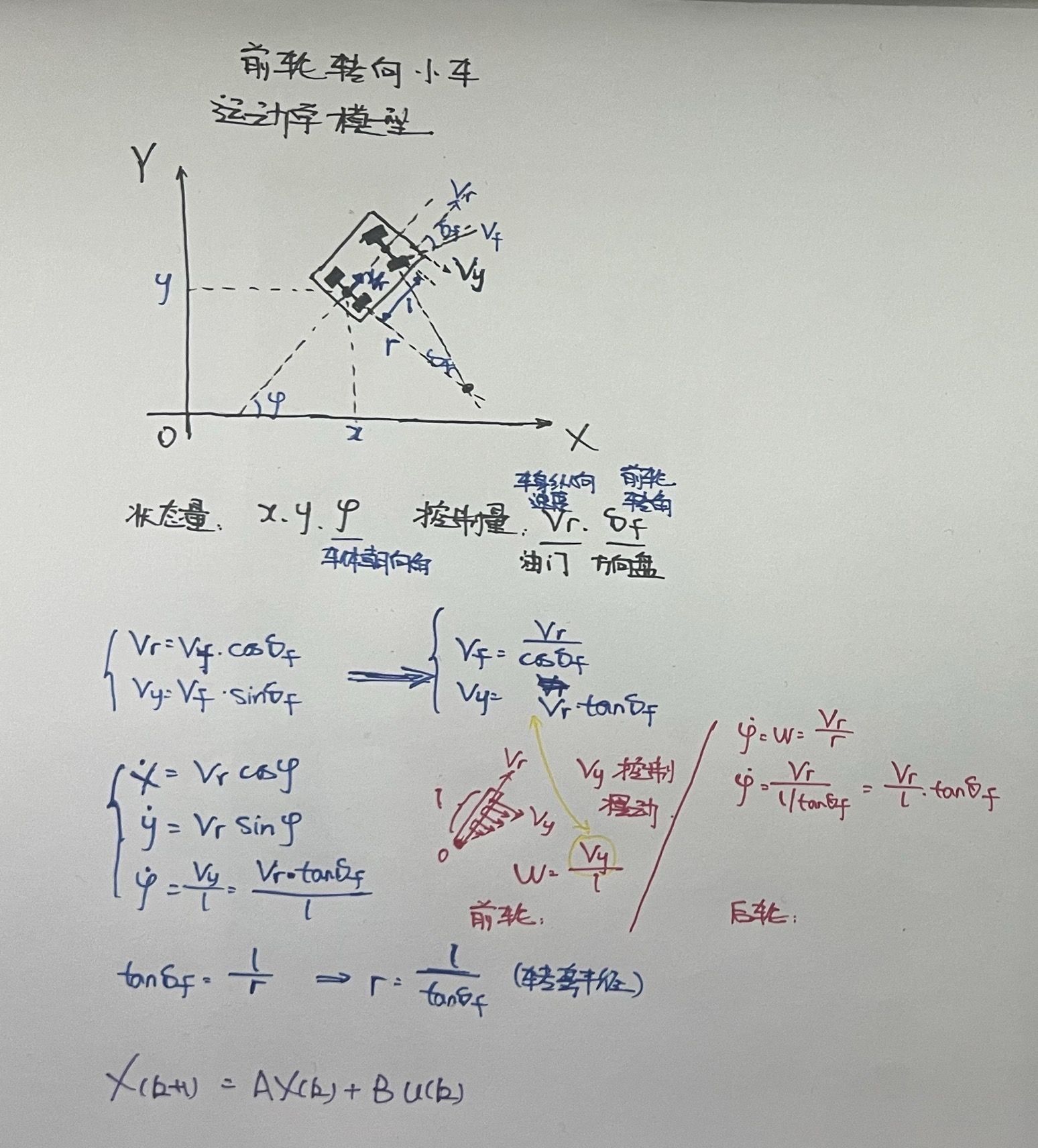
一、自行车模型结构(Bicycle Model)
将四轮车等效为:
-
后轴一个点
-
前轴一个点
-
轴距固定为 LLL
-
前轮可转向(角度 δf\delta_fδf)
-
后轮不可转向
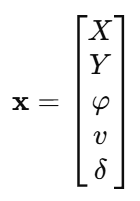
车辆状态:

输入量(控制量):

-
vr:车辆(后轮/车体)纵向速度
-
δf:前轮转角
二、速度分解 ------ 最关键的一步
前轮打了角后,前轮速度方向不再与车体一致。
前轮速度 vfv_fvf 在车体坐标系分解:

从第一行:
代入第二行:
打方向盘后,车辆产生的**"侧向速度分量",也是车辆开始转弯的根本原因**。
三、无侧滑约束(No-Slip Constraint)
轮胎允许沿自身方向滚动,但不允许横向滑动。
因此车辆绕某个瞬时圆心 ICR 运动。
几何关系:
得转弯半径:

四、角速度推导(Yaw Rate)
后轮速度:vr
绕圆心半径:R
所以角速度为:

代入上一步:

这是现代控制器(MPC/LQR)最常见的 yaw rate 模型。
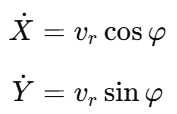
五、世界坐标系下速度
车体速度 vr 方向与世界系的夹角为 φ ,所以:
六、最终连续时间模型(Continuous Model)

这是运动学自行车模型的标准形式。
七、扩展输入:用加速度 & 转角速度作为控制量(工程常用)
实际车辆 ECU 不能直接控制:
-
速度 vr(而是加速度 a)
-
转角 δf(而是转角速度 δ˙)
因此加入动力学状态:
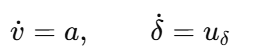
扩展状态:
扩展模型:

这是自动驾驶 MPC 最常用的 非线性运动学模型。
1)转角速度解释:
转角速度 不是车的角速度(车身转弯的 Yaw rate)
而是:
方向盘打角的变化速度
也就是前轮转角 δ 时间导数
简单说:
-
δ:前轮当前打了多少角
-
δ˙:前轮"转向动作"变化的速度
就像...
-
人转方向盘时 → δ 在变化
-
你转得快一点 → δ˙ 大
-
你转得慢一点 → δ˙ 小
单位通常是:
-
rad/s(自动驾驶控制使用)
-
deg/s(汽车标定使用)
2)为什么控制输入不是 δ 而是 δ˙
因为真实车辆有转向执行器,包含:
-
电机
-
减速机
-
力反馈
-
机械限位
-
最大加速度/角速度
这些执行器不能让你"瞬间跳到某个转角"。
比如:
你不可能一下把方向盘从 0° 打到 30°,总要一个过程!
这个过程由转角速度 δ˙ 决定。
所以真实 ECU 接受的是:
| 控制量 | 含义 |
|---|---|
| a | 油门/刹车产生的加速度 |
| δ˙ | 转向执行器的角速度指令 |
而不是:
| 不直接控制 |
|---|
| v(车辆速度) |
| δ(方向盘角度) |
这些都是最终结果。
3)更工程的解释:转角速度 = 转向电机的目标速度
在 AGV / 无人叉车 / 汽车中,转角是通过"转向电机"驱动的。
电机控制里常见的闭环结构:
bash
目标转角 δ_target
→ 误差 = δ_target - δ_measured
→ PID 控制
→ 得到需要的 转角速度 δ˙
→ 由伺服驱动器控制执行器 所以控制器给 ECU 的信号一般是:方向盘转速(电机角速度)
而不是:让方向盘瞬间转到 15°
因为那样不符合执行器的物理机制。
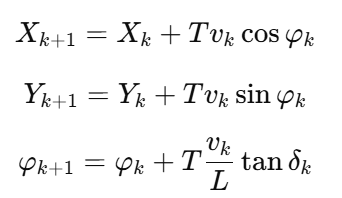
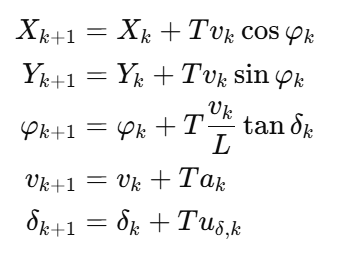
八、离散化(用于 MPC / 仿真 / 代码实现)
最常用离散化:Euler 前向差分
采样周期 T
如果带动态输入:
离散后的完整形式:
这是 MPC 一定要用的版本。
九、小角度线性化(用于 LQR、线性 MPC)
对于低速 & 小转角:
线性化得到:
线性模型可写成:
十、完整可复用模型总结
1)连续时间模型(工程常用):

2)离散时间模型(MPC 直接可用):
3)小角度线性化(用于 LQR)
十一、 适用范围
1)使用本模型的情况
-
低速(通常 < 10 m/s)
-
无明显侧滑(工厂 AGV 最完美适用)
-
平面运动
-
转向角小于 30--35°
2)不适使用的情况
-
高速漂移
-
强侧偏力(需动力学模型)
-
轮胎受力主导的操控