论文名称:Strip R-CNN: Large Strip Convolution for Remote Sensing Object Detection
论文原文 (Paper) :https://arxiv.org/abs/2501.03775
官方代码 (Code) :https://github.com/HVision-NKU/Strip-R-CNN
GitHub 仓库链接 :https://github.com/AITricks/AITricks
哔哩哔哩视频讲解 :https://space.bilibili.com/57394501?spm_id_from=333.337.0.0
目录
-
-
- [1. 核心思想](#1. 核心思想)
- [2. 背景与动机](#2. 背景与动机)
- [3. 主要贡献点](#3. 主要贡献点)
- [4. 方法细节](#4. 方法细节)
- [5. 即插即用模块的作用](#5. 即插即用模块的作用)
-
1. 核心思想
本文针对遥感目标检测中普遍存在的高长宽比(细长)物体检测难题,提出了一种名为 Strip R-CNN 的高效网络架构。该方法的核心论点是:相比于传统的方形大卷积核,大型条状卷积(Large Strip Convolution) 能更有效地捕捉细长物体的各向异性特征。通过在骨干网络中序贯地引入正交的大尺度条状卷积,并在检测头中解耦定位任务并使用条状模块增强,Strip R-CNN 能够以极低的参数量(30M)在 DOTA-v1.0 数据集上实现 SOTA 性能(82.75% mAP)。
2. 背景与动机
-
文本角度总结 :
遥感图像中的目标往往具有任意方向和极端的长宽比(如桥梁、港口、船舶等)。现有的旋转目标检测器通常依赖于方形大卷积核(如 LSKNet, PKINet)来扩大感受野以捕捉长距离上下文。然而,作者认为方形卷积核在处理细长物体时会引入大量无关的背景噪声,且在计算上存在冗余。此外,传统的检测头(如 Oriented R-CNN Head)通常将分类和定位任务耦合,或仅使用全连接层/小卷积核进行定位,这限制了对细长物体进行精确定位所需的长距离依赖捕捉能力。
-
动机图解分析:
- 图 1 (Fig. 1): DOTA 数据集统计与现有模型性能
- 柱状图:展示了 DOTA 数据集中不同长宽比(Aspect Ratio)物体的数量分布。可以看出,长宽比 > 3 的细长物体占据了相当大的比例。
- 折线图:展示了现有 SOTA 模型(如 LSKNet, O-RCNN 等)在不同长宽比下的检测性能(mAP)。可以明显看到,随着物体长宽比的增加,所有模型的性能都呈显著下降趋势。这直观地揭示了现有方法在处理"细长物体"时的局限性,引出了本文的动机:设计一种专门针对高长宽比物体的检测器。
- 图 6 (Fig. 6): 空间相关性图 (Spatial Correlation Map)
- 左图 (Oriented R-CNN Head):显示了传统检测头输出特征的空间相关性。可以看到其相关性范围较小,且主要集中在局部。
- 右图 (Strip Head):显示了本文提出的 Strip Head 的空间相关性。可以看到其特征图上的点与周围(尤其是长距离方向上)具有更强的相关性。这对比说明了引入条状卷积能有效捕捉长距离依赖,解决了传统检测头定位能力不足的问题。
- 图 1 (Fig. 1): DOTA 数据集统计与现有模型性能
3. 主要贡献点
-
贡献点 1:提出了 Strip R-CNN 网络架构
设计了一个简单、高效且强大的遥感目标检测框架。该框架不依赖复杂的注意力机制或多分支结构,而是回归到卷积设计的本源,通过创新的条状卷积设计实现了卓越的性能。
-
贡献点 2:设计了 StripNet 骨干网络
提出了基于 Strip Block 的骨干网络。不同于 LSKNet 和 PKINet 使用的方形大核,Strip Block 采用序贯的正交大型条状卷积 (例如 1 × K 1 \times K 1×K 和 K × 1 K \times 1 K×1)来替代大方形核。这种设计在大幅降低计算量(参数量减少,FLOPs 降低)的同时,能更精准地匹配细长物体的几何特征。
-
贡献点 3:提出了 Strip Head 检测头
重新设计了检测头,将分类、角度回归和定位任务解耦。特别是在定位分支中引入了 Strip Module,利用条状卷积来增强定位特征的长距离感知能力,从而提高对细长物体边界框回归的准确性。
4. 方法细节
-
整体网络架构 :
请参考 Fig. 4© 和 Fig. 5。
- 骨干网络 (StripNet) :输入图像经过 Stem 层后,进入 4 个阶段的特征提取。每个阶段由堆叠的 Strip Block 组成。Strip Block 包含两个子模块:Strip Module (负责空间特征提取)和 FFN(负责通道混合)。
- 特征金字塔 (FPN):提取的多尺度特征被送入 FPN 进行融合。
- 检测头 (Strip Head) :基于 Oriented R-CNN 的框架,但对 Head 进行了改造。RoI 特征被送入解耦的三个分支:分类分支、角度分支和定位分支。其中定位分支嵌入了 Strip Module。
-
核心创新模块详解:
-
模块 A:Strip Module (条状模块) (Fig. 4 右侧放大图)
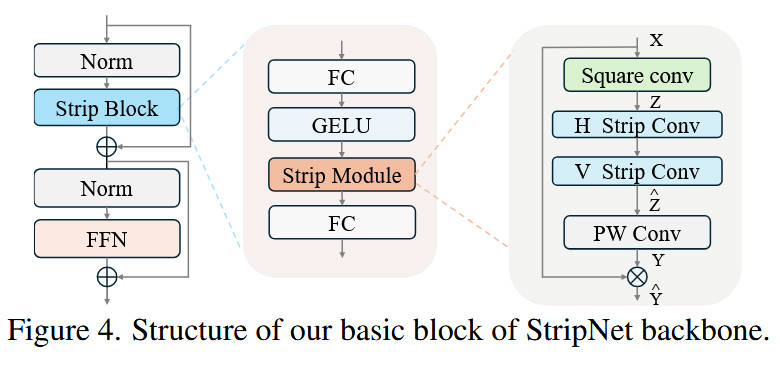
- 内部结构:这是一个用于替代标准大核卷积的组件。
- 数据流 :
- 输入 (X) :特征图首先经过一个 5 × 5 5 \times 5 5×5 的小方形卷积 (Square conv),用于捕获局部细节。
- 水平条状卷积 (H Strip Conv) :特征图接着通过一个 1 × K 1 \times K 1×K 的深度卷积(实验中 K = 19 K=19 K=19),捕获水平方向的长距离依赖。
- 垂直条状卷积 (V Strip Conv) :随后通过一个 K × 1 K \times 1 K×1 的深度卷积,捕获垂直方向的长距离依赖。注意,这两个条状卷积是串联 (Sequential) 的,而非并联。
- 点卷积 (PW Conv) :最后通过一个 1 × 1 1 \times 1 1×1 卷积进行通道融合,生成权重图 Y Y Y。
- 加权输出 :权重图 Y Y Y 与原始输入 X X X 进行元素级相乘(Element-wise Multiplication),得到最终输出。
- 设计目的 :通过序贯的条状卷积,模块能够模拟出大感受野,同时相比 K × K K \times K K×K 的大方核,参数量和计算量大幅降低,且更能适应细长物体的形状。
-
模块 B:Strip Head (条状检测头) (Fig. 5 下图)
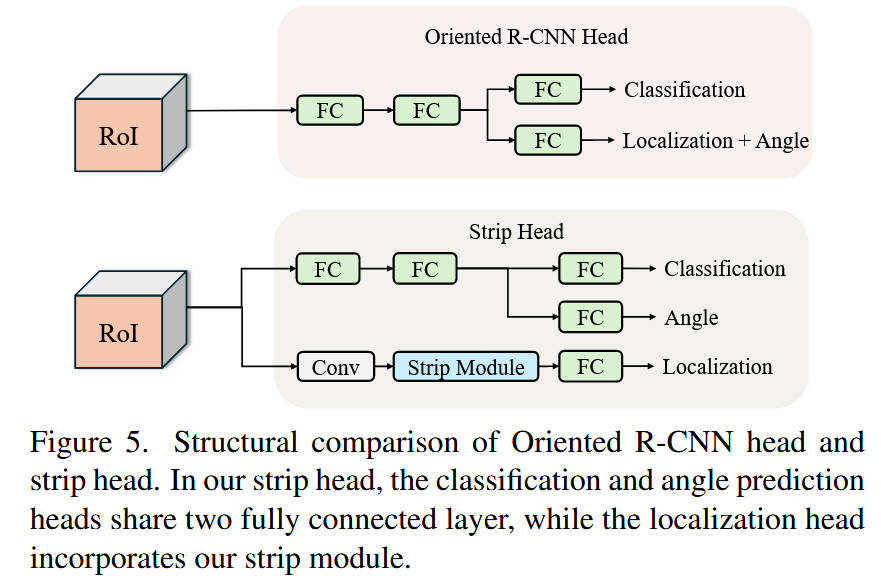
- 内部结构:解耦的检测头设计。
- 数据流 :
- 分类与角度分支:共享两个全连接层 (FC),然后分叉。这是基于图 7 的观察:分类和角度的敏感区域有重叠。
- 定位分支 :RoI 特征先经过一个卷积层,然后进入核心的 Strip Module(同上所述),最后通过 FC 层输出位置偏移。
- 设计理念:传统的 FC 层缺乏空间敏感性。在定位分支引入 Strip Module,可以显式地增强特征图在长宽方向上的感知能力,这对回归细长物体的边界框(Bounding Box)至关重要。
-
-
理念与机制总结:
- 核心理念 :"因形制宜"。遥感物体多为细长型,且方向任意。方形卷积核会引入过多背景噪声。条状卷积(Strip Conv)就像一把尺子,可以沿着物体的长轴方向进行特征聚合,既匹配了物体的几何特性,又节省了计算资源。
- 序贯正交机制 :通过串联 1 × K 1 \times K 1×K 和 K × 1 K \times 1 K×1 卷积,网络实际上拥有了 K × K K \times K K×K 的理论感受野,但其关注点更侧重于十字形的轴向特征,这正好符合细长物体在旋转后的投影特性。
-
图解总结:
- Fig. 3 直观对比了 LSKNet(大方核)、PKINet(多尺度方核并联)和 Strip R-CNN(条状核串联)的结构。Strip R-CNN 的结构最为精简。
- Fig. 8 展示了不同核大小的特征响应。可以看到 K = 19 K=19 K=19 时,细长物体(如桥梁)的响应最强且背景噪声最少。
- Fig. 9 的 Eigen-CAM 可视化显示,相比其他方法,Strip R-CNN 的热力图更精准地覆盖了细长物体的整体,而不仅仅是局部。
5. 即插即用模块的作用
论文提出的 Strip Module 是一个极佳的即插即用模块:
- Strip Module (条状模块)
- 适用场景 :任何涉及细长物体检测 、旋转目标检测 或需要轻量化大感受野的视觉任务。
- 具体应用 :
- 替换骨干网络卷积 :在 ResNet, MobileNet 或 ConvNeXt 等网络中,可以用 Strip Module 替换原本的 3 × 3 3 \times 3 3×3 或 7 × 7 7 \times 7 7×7 卷积块(Spatial Mixing 层)。这将显著扩大有效感受野,同时降低参数量,特别适合遥感图像、场景文字检测(Scene Text Detection)或车道线检测等任务。
- 增强检测头 (Head) :在 YOLO, Faster R-CNN 或 RetinaNet 的检测头(尤其是 Regression/Localization 分支)中插入 Strip Module。如论文中 Strip Head 所示,这能显著提升对高长宽比物体的定位精度。
- 注意力机制替代 :Strip Module 输出的权重图与输入相乘的机制,本质上是一种空间注意力 (Spatial Attention)。它可以作为一种高效的 Attention 模块插入到网络的任何特征融合阶段(如 FPN 的融合后)。
到此,有关HVI-CIDNet的内容就基本讲完了。如果觉得这篇文章对你有用,记得点赞、收藏并分享给你的小伙伴们哦😄。
获取更多高质量论文及完整源码关注 【AI即插即用】