引言
智驾的精准感知需求
随着自动驾驶系统向L3+级别迈进,多传感器融合感知已成为实现高可靠性环境感知的必然选择。现代自动驾驶系统通常集成激光雷达、摄像头、毫米波雷达、惯性导航系统等十余个传感器,这些传感器在时间同步和空间坐标统一方面面临严峻挑战。
深信科创推出OASIS CALIBER 传感器标定软件,建立一套稳定可靠的标定体系,致力于为多传感器系统提供全链路的高精度标定支持。
精确的传感器标定是构建高可靠性自动驾驶系统的基石,标定的精度直接决定多传感器融合的效果,为车辆提供可靠的环境感知数据支持安全的路径规划,影响车辆定位精度和运动控制准确性,甚至为整个数据闭环提供基础支撑保证数据采集、标注到仿真测试各环节的一致性。
01
方案介绍
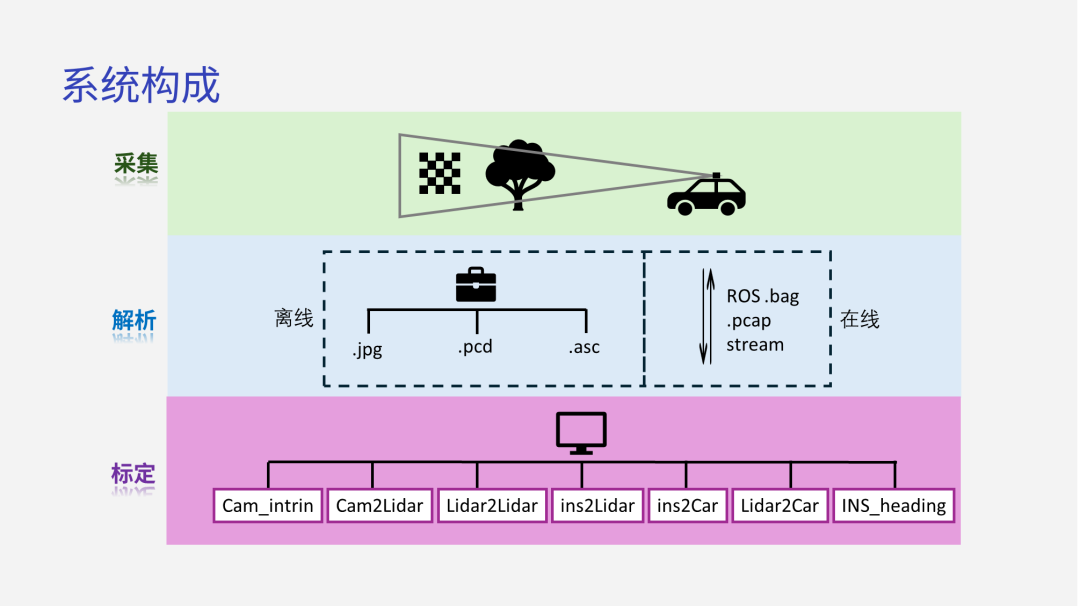
OASIS CALIBER是一款面向数据采集车的多模态传感器内外参标定软件,提供覆盖⾃动驾驶全链路的⾼精度标定解决⽅案。
OASIS CALIBER⽀持相机内参外参标定、雷达外参标定、雷达到⻋辆坐标系标定、INS到⻋辆坐标系标定以及INS航向⻆标定。
通过严格的精度控制和验证体系,我们的标定⽅案达到⾏业领先的精度⽔平,可降低感知系统30%以上的误报率,全⾯提升⾃动驾驶在感知、决策与控制环节的可靠性与安全性。
02
核心优势
● 领先行业的标定精度
-
时间同步精度:100微秒以内
-
空间标定精度(50米范围内):
相机与激光雷达的标定误差<0.1像素
雷达间标定误差<3厘⽶
惯性导航系统标定误差<0.1度
● 全流程自动化与高效率
-
标定过程完全⾃动化,⽆需⼈⼯⼲预,⼤幅提升了标定效率,降低对专业操作⼈员的依赖,满⾜量产应⽤要求。
-
具备实时在线的标定质量实时评估系统,确保每个标定结果都达到质量要求。
● 标定结果的可重复性与可靠性
-
建⽴覆盖标定物加⼯、环境控制到测量过程的完整精度溯源体系,确保标定结果在不同⻋型、不同环境下具备卓越的可重复性和可靠性。
-
精度指标经过⼤量实⻋测试验证,关键参数漂移量被严格控制在精度要求的10%以内,保证标定质量。
● 全面提升系统性能
-
显著提升感知可靠性,将感知系统的误报率降低30%以上。OASIS CALIBER 为决策规划系统提供⾼度可信的环境感知结果,从源头提升安全性。
-
⼤幅增强感知完整性,使⽬标检测召回率提升20%以上。传感器融合效果最⼤化,显著减少漏检⻛险。
03
主要功能详解
● 相机内参标定
自动精确计算相机焦距、主点、畸变参数等内部参数,校正镜头变形。全面支持从鱼眼镜头到长焦镜头的多种镜头类型,实现完全自动化标定与实时质量评估。
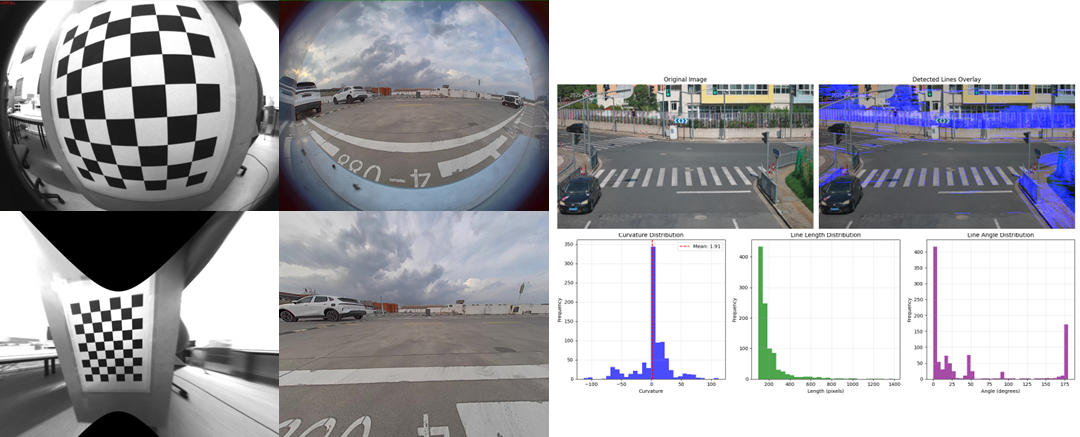
● 相机外参标定
将激光雷达的精确三维距离与摄像头的丰富纹理信息完美对齐,显著提升恶劣天气(如雨、雾、夜间的)下的目标识别率。在50米范围内对齐误差小于0.1像素,直接提升多模态融合感知的可靠性。

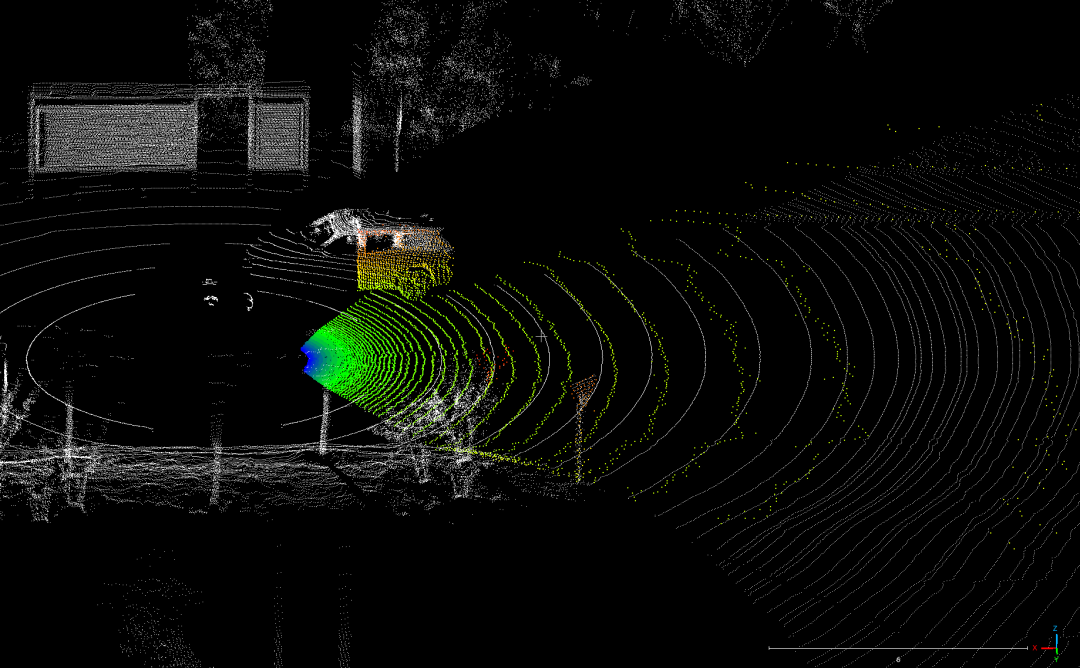
● 雷达外参标定
统一多个雷达的坐标系,实现360°无死角环境感知。50米范围内的位置标定误差<3厘米,角度标定误差<0.1度,有效消除感知盲区和目标跳变。
● 雷达-车辆坐标系标定
建立雷达感知数据与车辆控制系统的坐标映射,确保障碍物定位信息可被车辆精准理解和执行从而实现自动紧急制动、自动泊车等。
位置标定误差<2厘米,角度标定误差<0.1度。经过严格验证测试,100米的感知范围内,目标相对位置估计误差<5cm。
●INS-车辆坐标系标定
标定INS与车辆的真实运动中心,实现INS输出与车辆实际运动实现高度一致,确保"感知"和"决策"能够准确无误地转化为"控制"。
位置标定误差<3厘米,航向角误差<0.1度,在急加速、紧急制动等极限工况下,INS估计的车辆姿态与实际情况吻合良好。
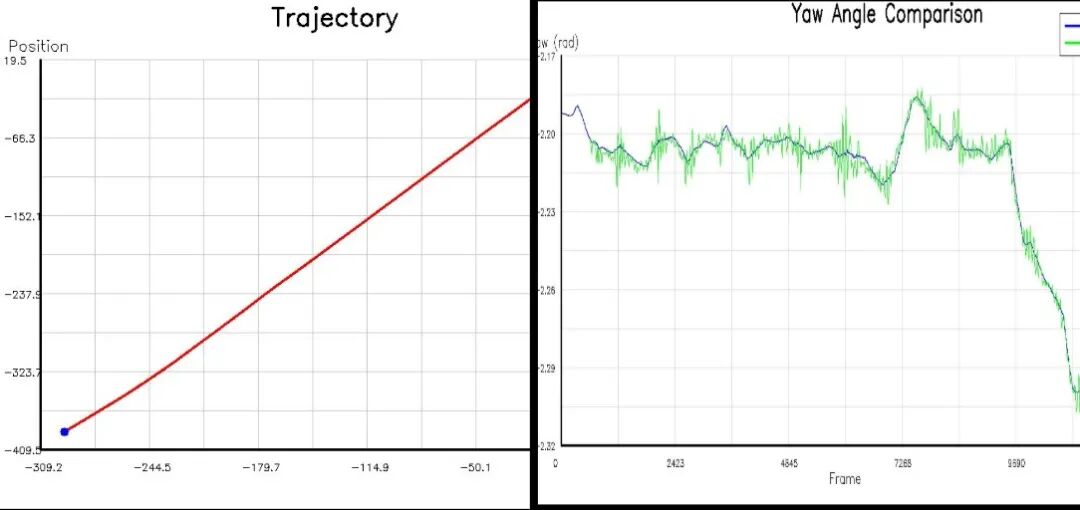
● INS的Heading角标定
提供精确的车头方向(航向角),是车辆保持正确车道、实现平滑转弯和换道的基础,尤其在GPS信号不可靠的场景中至关重要。
静态标定精度优于0.1度,动态行驶过程中精度优于0.3度。开阔区域误差<0.1度,复杂环境中误差控制在0.5度之内。
04
应用价值:筑牢感知基石
本传感器标定方案实现了四大核心能力:各传感器微秒级的时间同步精度;建立精确的空间变换关系;通过在线标定和参数补充克服车辆行驶过程中受到的振动、温度变化等因素影响;建立标准化的标定流程和质量评估体系。从而保障自动驾驶系统的感知精度和安全性,是商业化落地不可或缺的技术前提。
更多应用场景:
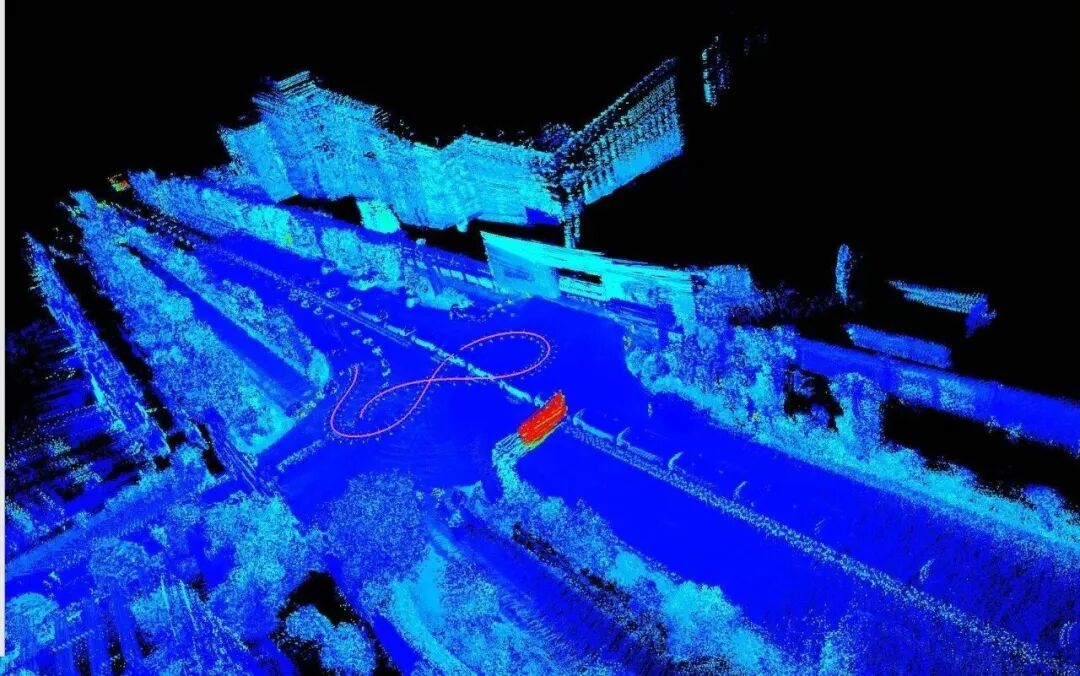
● 高精度地图采集与制作
为地图采集车提供精确的传感器标定,确保采集的道路、交通标志等地理空间数据绝对准确,是制作高可靠性高精度地图的感知基石。
● 自动驾驶算法研发与测试
-
在研发阶段,为感知算法提供精准标定的高质量数据
-
在仿真测试中,确保虚拟传感器模型与实车参数一致,加速算法迭代验证,提升开发效率。
● 前装量产车型的产线标定
-
集成至整车厂生产线,实现新车下线的快速、自动化标定
-
在车辆全生命周期内,支持售后维修、部件更换后的标定参数刷新与在线监测,保障车辆持续符合安全与性能标准。
● 机器人、无人车等智能移动平台
- 任何依赖多传感器融合进行环境感知和导航的智能移动设备,均可受益于OASIS CALIBER的高精度标定能力。
05
欢迎技术交流&产品演示
以上即为深信科创传感器标定方案的核心解析,欢迎感兴趣的伙伴联系我们进行技术交流与演示,共同探讨如何为您的具体需求提供定制化解决方案。

往期推荐:
一文看懂|OASIS SIM V3.0交通流如何为自动驾驶算法提供CornerCase挑战