
前言
在算法的世界里,有这样一个 "磨人的小妖精"------ 动态规划(Dynamic Programming,简称 DP)。它既是大厂面试的高频考点,也是算法竞赛中的 "得分利器",却让无数初学者望而却步:"听起来就好深奥""状态转移方程到底怎么推""为什么别人一眼就能想到,我却毫无头绪"?
其实动态规划没有那么玄乎!它就像一个聪明的 "记忆大师",遇到重复的问题时,会把答案记下来,下次再遇到就直接复用,避免做无用功。今天这篇 5000 字长文,就从最基础的记忆化搜索开始,一步步带你走进动态规划的世界,用生动的例子、详细的代码拆解,让你彻底搞懂 DP 的核心逻辑,从此不再惧怕这类问题。下面就让我们正式开始吧!
一、为什么动态规划如此 "难入门"?
在正式学习之前,我们先聊聊为什么很多人觉得动态规划难。其实主要原因有三点:
1. 概念抽象,不像 "暴力搜索" 那样直观
动态规划的核心思想是**"分治 + 记忆化"**,但它不像暴力搜索那样,能直接看出 "一步步尝试所有可能" 的逻辑。它需要我们跳出具体的操作,站在 "状态" 的角度思考问题 ------ 什么是状态?如何表示状态?状态之间如何转移?这些抽象的概念,需要通过具体题目才能慢慢理解。
2. 题型多变,没有 "万能模板"
动态规划不是一种特定的算法,而是一种解决问题的思想。它的应用场景非常广泛:从简单的斐波那契数列,到复杂的背包问题、区间合并问题,再到字符串匹配问题,每种题型的状态设计和转移方程都不同。这意味着我们不能死记硬背模板,必须理解其本质。
3. 入门门槛高,需要 "思维跃迁"
很多算法(比如排序、搜索)入门时,只要掌握基本逻辑就能解决不少问题。但动态规划入门时,即使理解了概念,也可能面对题目无从下手。这是因为它需要我们具备 "拆分问题" 的能力 ------ 把复杂问题拆解成若干个重叠的子问题,再通过子问题的解推导出原问题的解。这种思维方式,需要通过大量练习才能培养。
不过大家不用慌!动态规划的学习遵循 "量变到质变" 的规律,只要坚持做几道题,就能逐渐找到感觉。接下来,我们就从最基础的 "记忆化搜索" 开始,一步步搭建动态规划的知识体系。
二、铺垫:什么是记忆化搜索?------ 动态规划的 "雏形"
在学习动态规划之前,我们先来看一个经典问题:斐波那契数列。这个问题是理解记忆化搜索和动态规划的最佳切入点。
2.1 斐波那契数列的 "暴力困境"
斐波那契数列的定义很简单:
- F(0) = 0,F(1) = 1
- 对于 n ≥ 2,F (n) = F (n-1) + F (n-2)
如果用暴力递归的方式实现,代码如下:
cpp
int fib(int n) {
if (n == 0 || n == 1) return n;
return fib(n-1) + fib(n-2);
}看似简洁,但当 n 较大时(比如 n=30),程序的运行速度会变得非常慢。为什么?我们可以画出递归树来看看:
当计算 fib (5) 时,递归树是这样的:
fib(5)
├─ fib(4)
│ ├─ fib(3)
│ │ ├─ fib(2)
│ │ │ ├─ fib(1) → 1
│ │ │ └─ fib(0) → 0
│ │ └─ fib(1) → 1
│ └─ fib(2)
│ ├─ fib(1) → 1
│ └─ fib(0) → 0
└─ fib(3)
├─ fib(2)
│ ├─ fib(1) → 1
│ └─ fib(0) → 0
└─ fib(1) → 1我们发现,fib (3) 被计算了 2 次,fib (2) 被计算了 3 次,fib (1) 被计算了 5 次 ------ 大量的重复计算导致了效率低下。这种情况下,时间复杂度是 O (2ⁿ),当 n=40 时,运算次数就会达到上亿次,程序几乎无法运行。
2.2 记忆化搜索:给递归 "加个备忘录"
既然问题出在 "重复计算" 上,那我们能不能把已经计算过的结果存起来,下次再遇到时直接取用?这就是 "记忆化搜索" 的核心思想。
我们可以用一个数组(相当于 "备忘录")来存储已经计算过的斐波那契数。当调用 fib (n) 时,先检查备忘录里有没有存过 F (n):
- 如果有,直接返回备忘录里的值;
- 如果没有,计算后把结果存入备忘录,再返回。
代码实现如下:
cpp
#include <iostream>
using namespace std;
const int N = 100;
int f[N]; // 备忘录数组,存储已经计算过的斐波那契数
int fib(int n) {
// 先查备忘录,如果已经计算过,直接返回
if (f[n] != -1) return f[n];
// 递归出口
if (n == 0 || n == 1) return f[n] = n;
// 计算并存入备忘录
f[n] = fib(n-1) + fib(n-2);
return f[n];
}
int main() {
// 初始化备忘录为-1,表示未计算
memset(f, -1, sizeof f);
int n;
cin >> n;
cout << fib(n) << endl;
return 0;
}这样改造后,递归树就变成了 "无重复" 的结构:每个 F (n) 只计算一次,计算后存入备忘录。此时时间复杂度从 O (2ⁿ) 降到了 O (n),空间复杂度是 O (n)(用于存储备忘录和递归栈)。
2.3 记忆化搜索的本质:分治 + 缓存
记忆化搜索其实是 "分治思想" 和 "缓存机制" 的结合:
- 分治:把大问题(计算 F (n))拆解成小问题(计算 F (n-1) 和 F (n-2));
- 缓存:用备忘录存储小问题的解,避免重复计算。
这正是动态规划的核心思想!可以说,记忆化搜索是动态规划的 "雏形"------ 它已经具备了动态规划的两个关键特征:重叠子问题 和最优子结构(对于斐波那契数列,虽然没有 "最优" 之说,但子问题的解可以直接复用)。
三、从记忆化搜索到动态规划:递归改递推
记忆化搜索虽然解决了重复计算的问题,但它本质上还是递归,可能会遇到栈溢出的问题(比如当 n=1e4 时,递归深度过深)。因此,我们需要把递归改成非递归的形式 ------ 递推,这就是动态规划的标准形式。
3.1 斐波那契数列的递推实现
我们再回顾一下斐波那契数列的定义:F (0)=0,F (1)=1,F (n)=F (n-1)+F (n-2)。
观察这个规律,我们发现:要计算 F (n),只需要先计算 F (0)、F (1),然后依次计算 F (2)、F (3)...... 直到 F (n)。这种 "从小到大" 的计算方式,就是递推。
代码实现如下:
cpp
#include <iostream>
using namespace std;
const int N = 100;
int f[N]; // f[i]表示第i个斐波那契数
int fib(int n) {
// 初始化:边界条件
f[0] = 0;
f[1] = 1;
// 递推:从左往右计算
for (int i = 2; i <= n; i++) {
f[i] = f[i-1] + f[i-2];
}
return f[n];
}
int main() {
int n;
cin >> n;
cout << fib(n) << endl;
return 0;
}这个代码的逻辑非常清晰:
- 初始化:先确定边界条件(F (0) 和 F (1));
- 递推:按照递推公式,从左到右依次计算每个 F (i);
- 结果:f n 就是我们要求的答案。
此时,时间复杂度依然是 O (n),空间复杂度是 O (n)。我们还可以进一步优化空间:因为计算 F (i) 只需要 F (i-1) 和 F (i-2) 两个值,不需要存储整个数组。可以用两个变量来替代数组:
cpp
int fib(int n) {
if (n == 0) return 0;
if (n == 1) return 1;
int a = 0, b = 1;
for (int i = 2; i <= n; i++) {
int c = a + b;
a = b;
b = c;
}
return b;
}优化后,空间复杂度降到了 O (1),这就是动态规划的 "空间优化" 技巧 ------ 只保留必要的状态,丢弃无用的历史状态。
3.2 动态规划的核心概念:状态、转移、初始化
通过斐波那契数列的递推实现,我们可以引出动态规划的三个核心概念,这三个概念是解决所有 DP 问题的基础,必须牢牢掌握!
1. 状态表示(State Representation)
状态表示是动态规划的 "灵魂",它回答了 "我们用什么来存储子问题的解"。在斐波那契数列中,我们用 f i 表示 "第 i 个斐波那契数"------ 这就是状态表示。
状态表示通常用数组(一维、二维甚至多维)来实现,数组的每个元素都对应一个 "子问题"。设计状态表示时,需要明确:
- 数组的维度:根据问题的复杂程度,选择一维、二维或多维数组;
- 数组元素的含义:必须清晰定义 f i(或f ij)代表什么,这是后续推导转移方程的基础。
2. 状态转移方程(State Transition Equation)
状态转移方程是动态规划的 "骨架",它回答了 "如何通过子问题的解推导出当前问题的解"。在斐波那契数列中,状态转移方程是 f i = f i-1 + f i-2。
推导状态转移方程的关键是 "拆分问题":找到当前状态和之前状态之间的逻辑关系。通常可以通过 "最后一步操作" 来拆分 ------ 比如 "要到达第 i 个位置,最后一步是从哪里来的?"。
3. 初始化(Initialization)
初始化是动态规划的 "地基",它回答了 "子问题的边界条件是什么"。在斐波那契数列中,初始化是 f 0 = 0,f 1 = 1------ 这些是不需要通过转移方程就能直接确定的边界值。
初始化的核心是:确保所有通过转移方程计算的状态,其依赖的初始状态都是已知的。如果初始化错误,后续的计算都会出错。
4. 填表顺序(Filling Order)
填表顺序是动态规划的 "流程",它回答了 "我们应该按什么顺序计算状态"。在斐波那契数列中,填表顺序是 "从左往右"------ 因为计算 f i 需要 f i-1 和 f i-2,而这两个状态在 i 之前已经计算过。
填表顺序的原则是:在计算当前状态之前,其依赖的所有状态都已经计算完成。如果顺序错误,就会出现 "用未计算的状态来推导当前状态" 的情况,导致结果错误。
5. 最终结果(Final Result)
最终结果是动态规划的 "答案",它回答了 "我们要求的问题对应哪个状态"。在斐波那契数列中,最终结果是 f n。
有时候,最终结果可能不是某个单一状态,而是多个状态中的最大值、最小值或总和 ------ 这需要根据具体问题来确定。
3.3 动态规划与记忆化搜索的关系
看到这里,你可能会问:动态规划和记忆化搜索到底是什么关系?
简单来说:动态规划是记忆化搜索的 "递推实现"。它们的核心思想完全一致,都是 "存储子问题的解,避免重复计算",但实现方式不同:
- 记忆化搜索 :自上而下(Top-Down),从原问题出发,递归拆解成子问题,遇到未计算的子问题就计算并存储;
- 动态规划 :自下而上(Bottom-Up),从子问题出发,依次计算出更大的子问题,最终得到原问题的解。
两者的对比可以用下表表示:
| 特性 | 记忆化搜索 | 动态规划 |
|---|---|---|
| 实现方式 | 递归 | 递推 |
| 计算顺序 | 自上而下 | 自下而上 |
| 空间复杂度 | 包含递归栈,可能较高 | 可优化,通常较低 |
| 适用场景 | 子问题稀疏时更高效 | 子问题密集时更高效 |
| 代码难度 | 思维直接,代码简洁 | 需设计状态和转移方程 |
在实际应用中,我们可以根据问题的特点选择合适的方式。但对于大多数 DP 问题,动态规划(递推)的效率更高,也更不容易出现栈溢出问题,因此是更推荐的实现方式。
四、动态规划入门实战:手把手教你解 "下楼梯" 问题
理论讲完了,现在我们来做一道实战题,巩固一下动态规划的核心概念。这道题是动态规划的入门经典题 ------ 下楼梯问题,难度适中,非常适合初学者。
题目链接:https://www.luogu.com.cn/problem/P10250

4.1 题目描述(洛谷 P10250)
小明下楼梯时,每步可以走 1 个、2 个或 3 个台阶。现在有 N 个台阶,请问小明有多少种不同的下楼梯方案?
输入:一个整数 N(1 ≤ N ≤ 60)
输出:一个整数,表示方案数
示例 1:输入:4 输出:7
示例 2:输入:10 输出:274
4.2 问题分析
首先,我们需要把这个实际问题转化为动态规划的模型,也就是明确 "状态表示、状态转移方程、初始化、填表顺序和最终结果"。
1. 状态表示
我们需要定义一个状态,来表示 "子问题的解"。这里的子问题是 "走到第 i 个台阶有多少种方案"。因此:
- 定义f i:走到第 i 个台阶的总方案数。
最终结果就是 f N------ 走到第 N 个台阶的方案数。
2. 状态转移方程
如何推导状态转移方程?我们可以从 "最后一步操作" 入手:
小明走到第 i 个台阶,最后一步可能有三种情况:
- 最后一步走了 1 个台阶:那么他之前在第 i-1 个台阶,方案数就是 f i-1;
- 最后一步走了 2 个台阶:那么他之前在第 i-2 个台阶,方案数就是 f i-2;
- 最后一步走了 3 个台阶:那么他之前在第 i-3 个台阶,方案数就是 f i-3。
因此,走到第 i 个台阶的总方案数,就是这三种情况的方案数之和:f i = f i-1 + f i-2 + f i-3
3. 初始化
我们需要确定边界条件,也就是不需要通过转移方程就能直接计算的状态:
- 当 i=1 时,只有 1 种方案(走 1 个台阶),所以 f 1 = 1;
- 当 i=2 时,有 2 种方案(走 1+1 个台阶,或直接走 2 个台阶),所以 f 2 = 2;
- 当 i=3 时,有 4 种方案(1+1+1、1+2、2+1、3),所以 f 3 = 4。
或者,我们也可以初始化 f 0 = 1(表示 "在第 0 个台阶" 有 1 种方案,即原地不动),这样:
- f 1 = f 0 + f -1 + f -2 → 这里需要注意 i-1、i-2、i-3 不能小于 0,所以实际计算时要确保边界合法。
- 不过更简单的方式是直接初始化前 3 个状态,避免处理负数。
4. 填表顺序
因为 f i 依赖于 f i-1、f i-2、f i-3,所以填表顺序是**"从左往右"**,从 i=4 开始,依次计算到 i=N。
4.3 代码实现
根据上面的分析,我们可以写出代码:
版本一:基础版(数组实现)
cpp
#include <iostream>
using namespace std;
typedef long long LL; // 因为N最大为60,结果可能很大,用long long防止溢出
const int N = 65;
LL f[N]; // f[i]表示走到第i个台阶的方案数
int main() {
int n;
cin >> n;
// 初始化
f[1] = 1;
f[2] = 2;
f[3] = 4;
// 递推计算
for (int i = 4; i <= n; i++) {
f[i] = f[i-1] + f[i-2] + f[i-3];
}
cout << f[n] << endl;
return 0;
}版本二:空间优化版
观察到 f i 只依赖于前 3 个状态,我们可以用 3 个变量来替代数组,优化空间复杂度:
cpp
#include <iostream>
using namespace std;
typedef long long LL;
int main() {
int n;
cin >> n;
// 初始化:a=f[1], b=f[2], c=f[3]
LL a = 1, b = 2, c = 4;
if (n == 1) cout << a << endl;
else if (n == 2) cout << b << endl;
else if (n == 3) cout << c << endl;
else {
for (int i = 4; i <= n; i++) {
LL t = a + b + c;
a = b;
b = c;
c = t;
}
cout << c << endl;
}
return 0;
}4.4 代码测试
我们用示例输入来测试代码:
- 输入 4:输出 7(正确,因为 4 个台阶的方案有 1+1+1+1、1+1+2、1+2+1、2+1+1、2+2、1+3、3+1,共 7 种);
- 输入 10:输出 274(正确,符合题目示例)。
通过这道题,我们可以发现:动态规划的解题流程是固定的 ------ 先定义状态,再推导转移方程,然后初始化边界,最后按顺序填表。只要掌握了这个流程,就能解决大多数基础 DP 问题。
五、动态规划的关键思想:重叠子问题与最优子结构
在学习更多 DP 问题之前,我们需要深入理解动态规划的两个核心特性:重叠子问题 和最优子结构。这两个特性是判断一个问题是否适合用动态规划解决的关键。
5.1 重叠子问题(Overlapping Subproblems)
重叠子问题是指:原问题可以拆解成若干个小问题,而这些小问题之间存在重复 ------ 即同一个子问题会被多次计算。
比如在斐波那契数列中,计算 f (5) 需要 f (4) 和 f (3),计算 f (4) 又需要 f (3) 和 f (2),f (3) 被重复计算了两次 ------ 这就是重叠子问题。
动态规划通过 "存储子问题的解"(比如用数组 f 存储),让每个子问题只计算一次,从而避免了重复计算,提高了效率。这也是动态规划与分治算法的本质区别:分治算法的子问题是相互独立的,没有重叠,因此不需要存储子问题的解;而动态规划的子问题是重叠的,必须通过存储来避免重复计算。
5.2 最优子结构(Optimal Substructure)
最优子结构是指:原问题的最优解包含了子问题的最优解。也就是说,我们可以通过子问题的最优解,推导出原问题的最优解。
这里的 "最优" 是广义的,不仅指 "最大值""最小值",也包括 "方案数""可行性" 等。比如:
- 在下楼梯问题中,走到第 i 个台阶的方案数(原问题),是走到第 i-1、i-2、i-3 个台阶的方案数(子问题)之和 ------ 子问题的解直接构成了原问题的解;
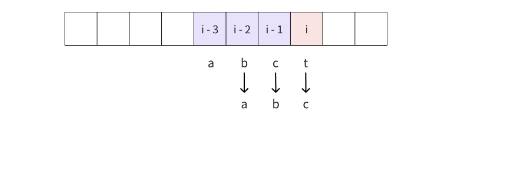
- 在后续的 "最大子段和" 问题中,以第 i 个元素为结尾的最大子段和(原问题),要么是第 i 个元素本身,要么是第 i 个元素加上以第 i-1 个元素为结尾的最大子段和(子问题)------ 子问题的最优解推导了原问题的最优解。
**最优子结构是状态转移方程的基础。**如果一个问题不具备最优子结构,就无法通过子问题的解推导出原问题的解,也就不能用动态规划解决。
5.3 如何判断一个问题是否适合用动态规划?
只要一个问题满足以下两个条件,就可以考虑用动态规划解决:
- 存在重叠子问题:子问题之间有重复,需要存储解来避免重复计算;
- 具备最优子结构:原问题的解可以通过子问题的解推导得出。
比如:
- 斐波那契数列:满足重叠子问题和最优子结构,适合用 DP;
- 下楼梯问题:满足重叠子问题和最优子结构,适合用 DP;
- 归并排序:子问题相互独立(没有重叠),不适合用 DP;
- 最长公共子序列(LCS):满足重叠子问题和最优子结构,适合用 DP。
六、动态规划入门必做的基础题(含详细解析)
为了让大家更好地掌握动态规划的解题流程,这里再推荐1道入门必做的基础题------数字三角形。
题目链接:https://www.luogu.com.cn/problem/P1216
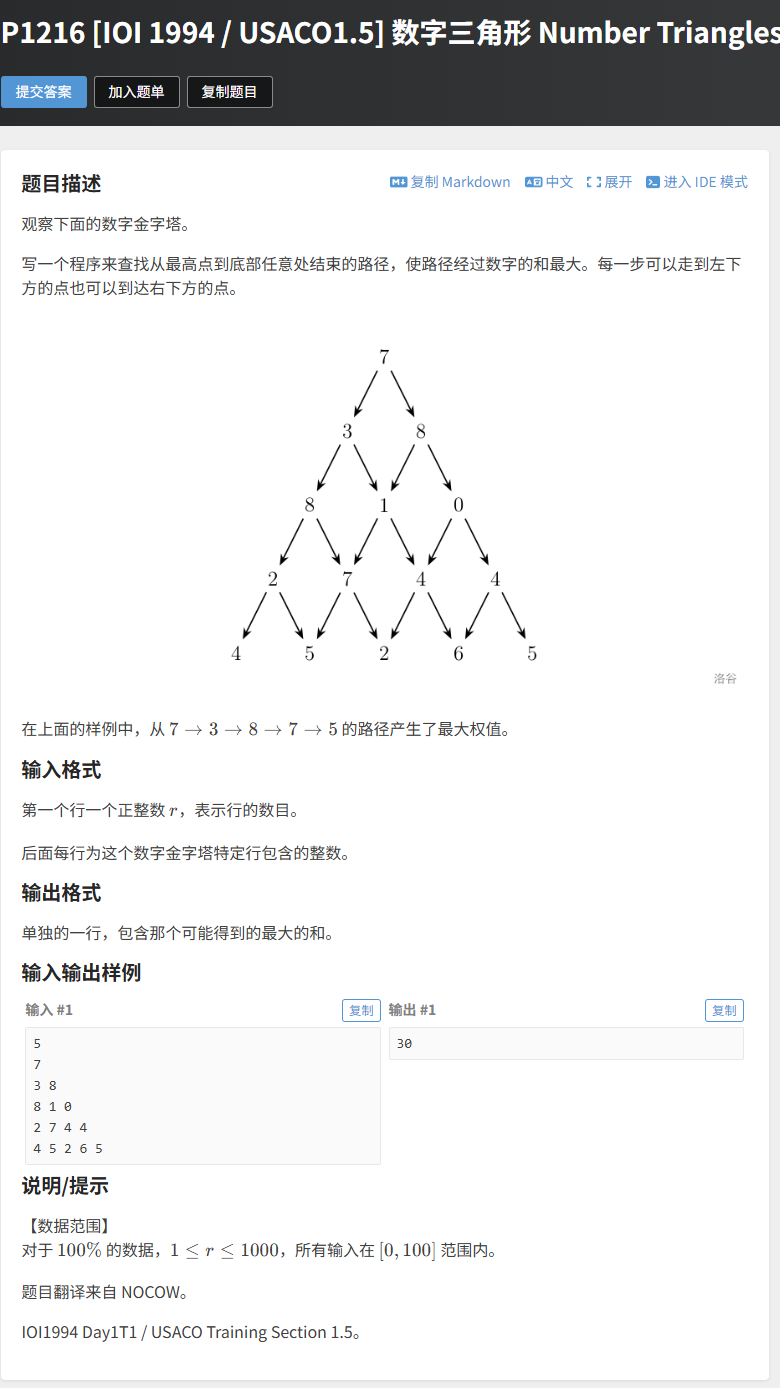
6.1 题目描述
观察数字金字塔,从最高点到底部任意处结束的路径,使路径经过数字的和最大。每一步可以走到左下方的点或右下方的点。
输入:
- 第一行:整数 r(1 ≤ r ≤ 1000),表示行数;
- 接下来 r 行:第 i 行有 i 个整数(0 ≤ 数字 ≤ 100)。
示例:输入:573 88 1 02 7 4 44 5 2 6 5 输出:30(路径:7→3→8→7→5)
问题分析
- 状态表示 :定义**f ij**为 "从顶部走到第 i 行第 j 列的最大和"(注意:行和列从 1 开始计数)。
- 状态转移方程 :第 i 行第 j 列的元素,只能从第 i-1 行第 j 列(左上方)或第 i-1 行第 j-1 列(右上方)走来。因此:f ij = max (f i-1j, f i-1j-1) + a ij
- 初始化 :第一行只有一个元素,f 11 = a 11。
- 填表顺序:从上往下,每行从左往右(因为 f ij 依赖 f i-1j 和 f i-1j-1)。
- 最终结果 :第 r 行所有f rj中的最大值(因为可以从底部任意位置结束)。
代码实现
cpp
#include <iostream>
#include <algorithm>
using namespace std;
const int N = 1010;
int a[N][N], f[N][N];
int main() {
int r;
cin >> r;
for (int i = 1; i <= r; i++) {
for (int j = 1; j <= i; j++) {
cin >> a[i][j];
}
}
// 初始化
f[1][1] = a[1][1];
// 递推计算
for (int i = 2; i <= r; i++) {
for (int j = 1; j <= i; j++) {
f[i][j] = max(f[i-1][j], f[i-1][j-1]) + a[i][j];
}
}
// 找第r行的最大值
int max_sum = 0;
for (int j = 1; j <= r; j++) {
max_sum = max(max_sum, f[r][j]);
}
cout << max_sum << endl;
return 0;
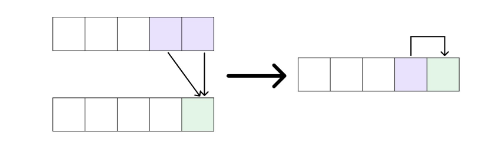
}空间优化
由于f ij 只依赖第 i-1 行的状态,我们可以用一维数组来优化空间。但需要注意:如果从左往右填表,会覆盖掉 f j-1(因为 f j 需要 f j-1 的值),因此需要从右往左填表。
优化后的代码:
cpp
#include <iostream>
#include <algorithm>
using namespace std;
const int N = 1010;
int a[N][N], f[N];
int main() {
int r;
cin >> r;
for (int i = 1; i <= r; i++) {
for (int j = 1; j <= i; j++) {
cin >> a[i][j];
}
}
// 初始化
f[1] = a[1][1];
// 递推计算:每行从右往左
for (int i = 2; i <= r; i++) {
for (int j = i; j >= 1; j--) {
f[j] = max(f[j], f[j-1]) + a[i][j];
}
}
// 找最大值
int max_sum = 0;
for (int j = 1; j <= r; j++) {
max_sum = max(max_sum, f[j]);
}
cout << max_sum << endl;
return 0;
}七、动态规划学习技巧与避坑指南
7.1 学习技巧
- 从基础题入手,不要急于挑战难题:动态规划的思维需要慢慢培养,建议先做 10-20 道基础题(比如本文中的斐波那契、下楼梯、最大子段和、数字三角形等),掌握状态设计和转移方程推导的基本方法,再逐步挑战背包、区间 DP 等复杂问题。
- 多画图,可视化状态转移:对于复杂问题(比如二维 DP),可以画出 DP 表,标注出状态之间的转移关系,这样能更直观地理解转移方程。
- 总结题型,归纳套路:动态规划的题型虽然多,但很多问题都有相似的套路(比如线性 DP、背包 DP、区间 DP)。做完一道题后,要总结它的状态设计方式和转移方程推导思路,形成自己的 "题型库"。
- 先暴力,再优化:遇到一道新的 DP 问题,先不要急于设计最优的状态表示,而是先思考暴力解法,然后分析暴力解法中的重复计算,再通过记忆化搜索或动态规划来优化。
- 多写代码,动手实践:动态规划的理解离不开代码实现。每道题都要亲手写代码,调试过程中能发现很多思维漏洞(比如初始化错误、填表顺序错误)。
7.2 常见坑点
- 状态表示不清晰:这是最常见的错误。如果状态表示模糊,后续的转移方程和初始化都会出错。解决方法:在写代码前,用文字明确写出 f i(或 f ij)的含义,确保自己完全理解。
- 转移方程推导错误:比如遗漏了某些转移情况(如下楼梯问题中忘记考虑走 3 个台阶的情况),或者逻辑错误(如把 "+" 写成 "*")。解决方法:通过 "最后一步操作" 来拆分问题,确保覆盖所有可能的转移路径。
- 初始化错误:边界条件设置错误,导致后续计算出错。解决方法:仔细分析问题的边界情况,确保初始化的状态是正确的。
- 填表顺序错误:导致计算当前状态时,依赖的状态还未计算。解决方法:明确每个状态依赖哪些之前的状态,确保填表顺序满足 "依赖先于当前"。
- 数据溢出:比如斐波那契数列、下楼梯问题中,当 n 较大时,结果会超出 int 范围。解决方法:根据题目数据范围,选择合适的数据类型(如 long long)。
- 空间未优化:对于大规模问题(如 n=1e5),使用二维数组会导致内存超限。解决方法:观察状态依赖,尽量用一维数组或变量替代多维数组。
总结
动态规划看似复杂,但核心思想其实很简单:把复杂的原问题,拆解成若干个重叠的子问题,通过存储子问题的解,避免重复计算,最终推导出原问题的解。
学习动态规划的过程,就是培养 "拆分问题" 和 "抽象状态" 的能力。从记忆化搜索到递推实现,从一维 DP 到二维 DP,每一步都是思维的跃迁。但只要坚持 "理解概念→做基础题→总结套路→挑战难题" 的步骤,就能慢慢掌握动态规划。
最后,送给大家一句话:动态规划没有捷径,唯有多思考、多练习。当你做完 50 道甚至更多 DP 题后,会发现曾经让你头疼的问题,都变得豁然开朗。加油,祝你在算法的道路上越走越远!