
目录
[一、路径类 DP 核心逻辑:用 "位置" 定义状态,用 "方向" 推导转移](#一、路径类 DP 核心逻辑:用 “位置” 定义状态,用 “方向” 推导转移)
[1.1 路径类 DP 的本质:位置即状态,移动即转移](#1.1 路径类 DP 的本质:位置即状态,移动即转移)
[1.2 路径类 DP 解题四步曲(通用模板)](#1.2 路径类 DP 解题四步曲(通用模板))
[1.3 路径类 DP 的两大优化方向](#1.3 路径类 DP 的两大优化方向)
[二、经典例题实战:从基础到进阶,吃透路径类 DP](#二、经典例题实战:从基础到进阶,吃透路径类 DP)
[例题 1:数字三角形(洛谷 P1216)------ 路径类 DP 入门题](#例题 1:数字三角形(洛谷 P1216)—— 路径类 DP 入门题)
[优化:滚动数组(空间从 O (r²)→O (r))](#优化:滚动数组(空间从 O (r²)→O (r)))
[例题 2:矩阵的最小路径和(牛客 DP11)------ 路径类 DP 的 "导航基础题"](#例题 2:矩阵的最小路径和(牛客 DP11)—— 路径类 DP 的 “导航基础题”)
[代码实现(基础版:二维数组 + 边界优化)](#代码实现(基础版:二维数组 + 边界优化))
[代码解析:为什么用 "无穷大" 初始化?](#代码解析:为什么用 “无穷大” 初始化?)
[优化:滚动数组(空间 O (nm)→O (m))](#优化:滚动数组(空间 O (nm)→O (m)))
[例题 3:"木" 迷雾森林(牛客网)------ 路径类 DP 的 "障碍迷宫题"](#例题 3:“木” 迷雾森林(牛客网)—— 路径类 DP 的 “障碍迷宫题”)
[优化:滚动数组(空间 O (mn)→O (n))](#优化:滚动数组(空间 O (mn)→O (n)))
[例题 4:过河卒(洛谷 P1002)------ 路径类 DP 的 "障碍 + 特殊约束题"](#例题 4:过河卒(洛谷 P1002)—— 路径类 DP 的 “障碍 + 特殊约束题”)
[代码实现(基础版:二维数组 + 控制点标记)](#代码实现(基础版:二维数组 + 控制点标记))
[代码解析:为什么用long long?](#代码解析:为什么用long long?)
[优化:边界统一处理(避免单独初始化第一行 / 列)](#优化:边界统一处理(避免单独初始化第一行 / 列))
[三、路径类 DP 通用解题模板总结](#三、路径类 DP 通用解题模板总结)
[1. 问题分析](#1. 问题分析)
[2. 状态定义](#2. 状态定义)
[3. 转移方程推导](#3. 转移方程推导)
[4. 初始化](#4. 初始化)
[5. 填表顺序](#5. 填表顺序)
[6. 优化技巧](#6. 优化技巧)
前言
如果你玩过《推箱子》这类游戏,一定对 "规划路径" 不陌生 ------ 从起点到终点,每一步都要考虑方向、障碍、收益,最终找到最优路线。而算法世界里的 "路径类线性 DP",本质就是解决这类 "地图导航" 问题的利器。
作为线性 DP 的重要分支,路径类 DP 的核心特点是状态与 "位置" 强绑定 ------ 无论是二维矩阵的
(i,j)坐标,还是环形地图的特殊点位,状态定义都离不开 "当前走到哪了",状态转移则围绕 "下一步能往哪走" 展开。相比于基础线性 DP(如最大子段和),路径类 DP 更贴近 "场景化问题",比如求最小路径和、统计可行路径数、避开障碍找最优解等。但只要掌握 "位置定义状态,方向推导转移" 的核心逻辑,就能轻松拿下这类题。
今天这篇文章,就带大家从 "入门到精通" 吃透路径类线性 DP:从最经典的 "数字三角形" 入手,到矩阵最小路径和、迷雾森林迷宫、过河卒避马难题,每道题都拆解清楚 "状态设计→转移推导→代码实现→优化技巧",最后再总结通用解题模板。哪怕你是刚接触 DP 的新手,跟着步骤走也能完全掌握!下面就让我们正式开始吧!
一、路径类 DP 核心逻辑:用 "位置" 定义状态,用 "方向" 推导转移
在正式讲例题前,我们先搞懂路径类 DP 的 "底层逻辑"------ 为什么它能解决地图路径问题?核心思路是什么?
1.1 路径类 DP 的本质:位置即状态,移动即转移
路径类 DP 的核心是把 "当前所在位置" 作为状态的核心要素 ,比如在二维矩阵中,用**dp[i][j]**表示 "走到第 i 行第 j 列时的某种目标值(如路径和、方案数)"。而状态转移的本质,就是 "从当前位置能到达的下一个位置,如何继承当前状态的信息"。
举个简单例子:如果只能向右或向下走,那么走到(i,j)的前一步,只能是(i-1,j)(从上方下来)或(i,j-1)(从左方过来)。这种 "移动方向限制",直接决定了状态转移方程的推导逻辑。
1.2 路径类 DP 解题四步曲(通用模板)
和所有线性 DP 一样,路径类 DP 也有固定的解题流程,记住这四步,90% 的题都能套用:
第一步:明确定义状态(最关键)
用dp[i][j]表示"走到位置(i,j)时的目标值",目标值根据题目需求确定:
- 求最小 / 最大路径和 :
dp[i][j]= 走到(i,j)的最小 / 最大路径和;- 求可行路径数 :
dp[i][j]= 走到(i,j)的不同路径总数;- 求特殊约束路径 :
dp[i][j]= 走到(i,j)且满足某条件(如不经过障碍)的目标值。
第二步:推导状态转移方程(核心逻辑)
根据 "允许的移动方向" 和 "题目目标" 推导:
- 方向限制:比如只能向右 / 向下 / 向上 / 向左,或多方向结合;
- 目标限制:比如求最小和就取前序状态的最小值,求方案数就累加前序状态的方案数;
- 特殊约束 :比如遇到障碍时dp[i][j] = 0(不可达),遇到特殊点时跳过。
第三步:初始化(避免逻辑漏洞)
路径类 DP 的初始化通常围绕 "起点" 和 "边界":
- 起点初始化 :比如起点
(1,1)的**dp[1][1]= 起点本身的值(路径和)或 1(方案数)**;- 边界初始化 :比如第一行只能从左向右走,所以dp[1][j] = dp[1][j-1] + a[1][j](路径和);第一列只能从上向下走,同理。
第四步:确定填表顺序(保证正确性)
填表顺序必须满足 "计算当前状态时,依赖的前序状态已计算完成":
- 若只能向右 / 向下:从左到右、从上到下填表;
- 若只能向上 / 向右:从下到上、从左到右填表;
- 若有环形或多方向:需特殊处理(如倍增数组),但基础路径类 DP 很少涉及。
1.3 路径类 DP 的两大优化方向
路径类 DP 的优化主要集中在 "空间" 上,因为二维dp数组在矩阵规模较大时(如1e3×1e3)会占用较多内存,常见优化技巧有:
- 滚动数组优化 :若**dp[i][j]**只依赖上一行(
i-1)或同一行的前半部分(j-1),可用一维数组替代二维数组,空间复杂度从O(nm)降至O(m);- 边界压缩:将矩阵的无效区域(如障碍、越界位置)提前处理,减少不必要的计算。
二、经典例题实战:从基础到进阶,吃透路径类 DP
接下来我们通过 4 道经典例题,一步步套用 "解题四步曲",从简单到复杂,彻底掌握路径类 DP 的逻辑。每道题都会详细拆解思路,附上完整代码和优化版本,确保你能看懂、会用、能举一反三。
例题 1:数字三角形(洛谷 P1216)------ 路径类 DP 入门题
题目描述:从金字塔顶端到低端的最大路径和
给定一个r行的数字三角形(金字塔形状),每次只能走到左下方或右下方的点,求从顶端走到低端任意位置的路径上,数字和的最大值。
输入:第一行是行数r(1≤r≤1000),后面r行是数字三角形的每一行(每个数字 0~100);
输出:最大路径和。
示例输入:
5
7
3 8
8 1 0
2 7 4 4
4 5 2 6 5示例输出:30(路径:7→3→8→7→5)
思路拆解(四步曲套用)
第一步:定义状态
数字三角形是二维结构,且路径方向固定(左下 / 右下),因此定义:dp[i][j] = 从顶端(1,1)走到第i行第j列时的最大路径和。
目标是求第r行所有**dp[r][j]**中的最大值(因为可以走到低端任意位置)。
第二步:推导状态转移方程
走到(i,j)的前一步只有两种可能:
- 从上方
(i-1,j)走下来(因为(i-1,j)的右下方是(i,j));- 从左上方
(i-1,j-1)走下来(因为(i-1,j-1)的右下方是(i,j))。
因此,dp[i][j] = 两种前序状态的最大值 + 当前位置的数字,即:dp[i][j] = max(dp[i-1][j], dp[i-1][j-1]) + a[i][j]
这里**a[i][j]**表示第i行第j列的数字。
第三步:初始化
- 顶端初始化:dp[1][1] = a[1][1](起点只有一个,路径和就是自身);
- 边界处理:第
i行有i个数字,j的范围是1~i。对于j=1(每行第一个元素),只能从(i-1,1)走下来,所以dp[i][1] = dp[i-1][1] + a[i][1];对于j=i(每行最后一个元素),只能从(i-1,i-1)走下来,所以dp[i][i] = dp[i-1][i-1] + a[i][i]。
第四步:填表顺序
从第 2 行开始,每行从左到右填表(因为dp[i][j]依赖dp[i-1][j]和dp[i-1][j-1],上一行已计算完成)。
代码实现(基础版:二维数组)
cpp
#include <iostream>
#include <algorithm>
using namespace std;
const int N = 1010; // 因为r最大1000,数组开1010足够
int r;
int a[N][N]; // 存储数字三角形
int dp[N][N]; // dp[i][j]:走到(i,j)的最大路径和
int main() {
cin >> r;
// 读取数字三角形(注意:第i行有i个元素)
for (int i = 1; i <= r; i++) {
for (int j = 1; j <= i; j++) {
cin >> a[i][j];
}
}
// 初始化:顶端
dp[1][1] = a[1][1];
// 填表:从第2行到第r行
for (int i = 2; i <= r; i++) {
// 处理每行第一个元素(j=1)
dp[i][1] = dp[i-1][1] + a[i][1];
// 处理每行中间元素(2<=j<=i-1)
for (int j = 2; j < i; j++) {
dp[i][j] = max(dp[i-1][j], dp[i-1][j-1]) + a[i][j];
}
// 处理每行最后一个元素(j=i)
dp[i][i] = dp[i-1][i-1] + a[i][i];
}
// 找第r行的最大值
int max_sum = 0;
for (int j = 1; j <= r; j++) {
max_sum = max(max_sum, dp[r][j]);
}
cout << max_sum << endl;
return 0;
}优化:滚动数组(空间从 O (r²)→O (r))
观察状态转移方程:**dp[i][j]只依赖上一行(i-1)的j和j-1位置,不需要存储所有行的dp值。因此可以用一维数组dp[j]**替代二维数组,通过 "从右向左" 填表避免覆盖前序状态。
优化后代码:
cpp
#include <iostream>
#include <algorithm>
using namespace std;
const int N = 1010;
int r;
int a[N][N];
int dp[N]; // 一维数组:dp[j]表示当前行第j列的最大路径和
int main() {
cin >> r;
for (int i = 1; i <= r; i++) {
for (int j = 1; j <= i; j++) {
cin >> a[i][j];
}
}
// 初始化:第一行
dp[1] = a[1][1];
// 填表:从第2行开始,每行从右向左填
for (int i = 2; i <= r; i++) {
// 从右向左:避免dp[j-1]被覆盖(如果从左向右,dp[j]会覆盖dp[j-1],影响后续计算)
for (int j = i; j >= 1; j--) {
if (j == 1) {
// 每行第一个元素:只能从上方下来
dp[j] = dp[j] + a[i][j];
} else if (j == i) {
// 每行最后一个元素:只能从左上方下来
dp[j] = dp[j-1] + a[i][j];
} else {
// 中间元素:取上一行j和j-1的最大值
dp[j] = max(dp[j], dp[j-1]) + a[i][j];
}
}
}
// 找最大值
int max_sum = 0;
for (int j = 1; j <= r; j++) {
max_sum = max(max_sum, dp[j]);
}
cout << max_sum << endl;
return 0;
}优化解析
为什么要 "从右向左" 填表?因为一维数组**dp[j]**存储的是上一行的状态:
- 如果从左向右填,计算dp[j]时会覆盖dp[j-1],而后续计算dp[j+1]需要上一行的dp[j](已被覆盖),导致错误;
- 从右向左填时,dp[j]依赖的dp[j](上一行的
j)和dp[j-1](上一行的j-1)都还没被覆盖,计算正确。
这种优化在矩阵规模较大时(如1e3×1e3)效果明显,能节省大量内存。
例题 2:矩阵的最小路径和(牛客 DP11)------ 路径类 DP 的 "导航基础题"
题目链接:https://www.nowcoder.com/practice/38ae72379d42471db1c537914b06d48e?tpId=230&tqId=39755&ru=/exam/o
题目描述:从左上角到右下角的最小代价
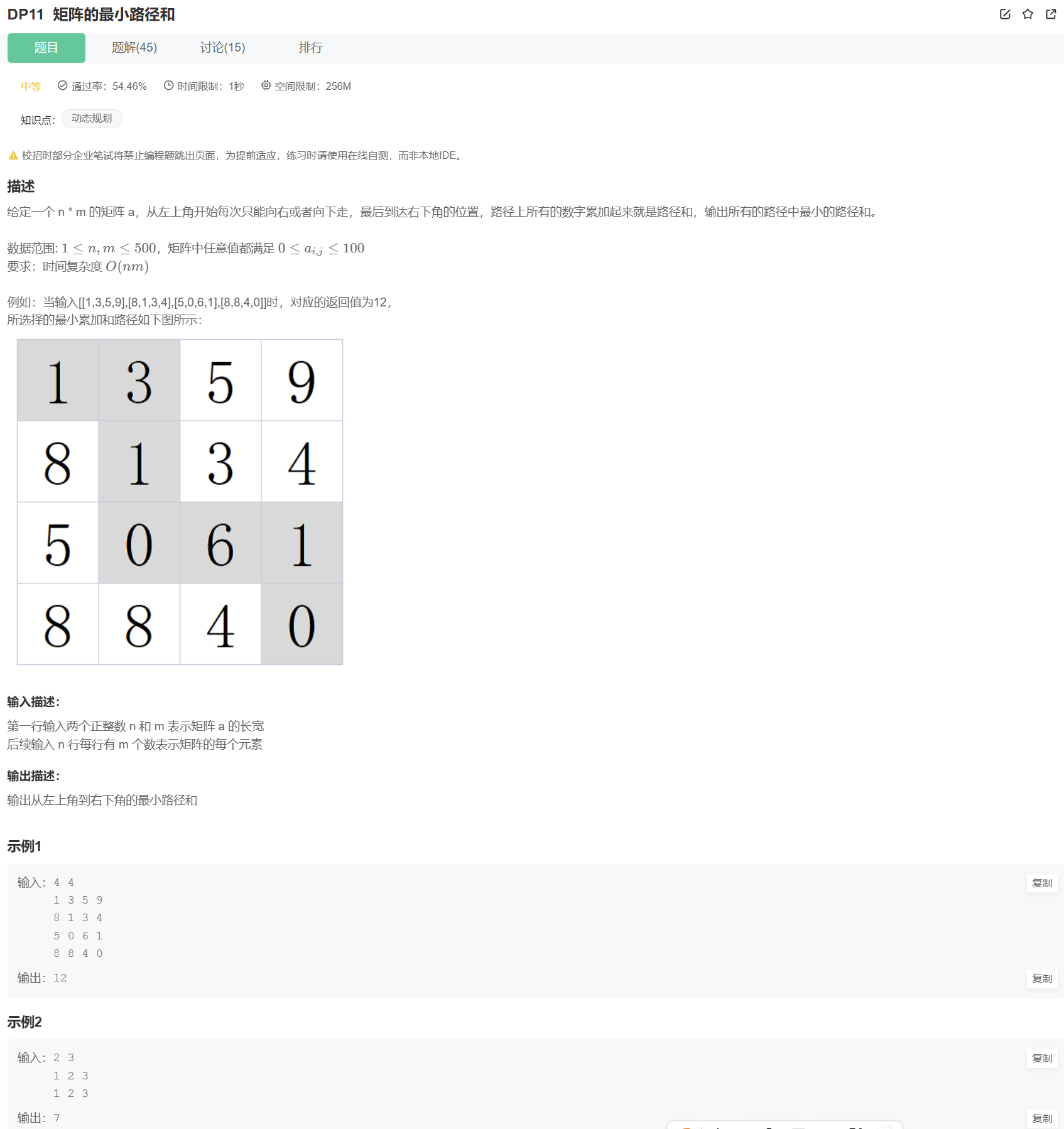
给定一个n×m的矩阵,每次只能向右或向下走,求从左上角(1,1)到右下角(n,m)的路径上,所有数字的和的最小值。
输入:第一行是n和m(1≤n,m≤500),后面n行是矩阵元素(0≤a ij≤100);
输出:最小路径和。
示例输入:
4 4
1 3 5 9
8 1 3 4
5 0 6 1
8 8 4 0示例输出:12(路径:1→3→1→0→6→1→0)
思路拆解(四步曲套用)
第一步:定义状态
矩阵路径问题,目标是 "最小路径和",因此定义:dp[i][j] = 从(1,1)走到(i,j)的最小路径和。
目标是dp[n][m](因为必须走到右下角)。
第二步:推导状态转移方程
只能向右或向下走,所以走到(i,j)的前一步只有两种可能:
- 从上方
(i-1,j)向下走:路径和 = dp[i-1][j] + a[i][j];- 从左方
(i,j-1)向右走:路径和 = dp[i][j-1] + a[i][j]。
要找最小值,因此转移方程:dp[i][j] = min(dp[i-1][j], dp[i][j-1]) + a[i][j]
第三步:初始化
需要处理第一行和第一列(边界):
- 第一行:只能从左向右走,所以dp[1][j] = dp[1][j-1] + a[1][j](比如
dp[1][2] = dp[1][1] + a[1][2],dp[1][3] = dp[1][2] + a[1][3]);- 第一列:只能从上向下走,所以dp[i][1] = dp[i-1][1] + a[i][1];
- 起点:dp[1][1] = a[1][1](初始状态)。
但这里有个小技巧:为了避免边界判断(比如i=1或j=1时的特殊处理),可以将dp数组的规模扩大一行一列(dp[0..n][0..m]),并将dp[0][1]或dp[1][0]初始化为 0,其他无效位置初始化为无穷大(0x3f3f3f3f),这样可以统一转移方程。
第四步:填表顺序
从左到右、从上到下(因为dp[i][j]依赖dp[i-1][j](上一行已算完)和dp[i][j-1](同一行左边已算完))。
代码实现(基础版:二维数组 + 边界优化)
cpp
#include <iostream>
#include <cstring> // 用于memset
#include <algorithm>
using namespace std;
const int N = 510; // n和m最大500,开510足够
int n, m;
int a[N][N]; // 存储矩阵
int dp[N][N]; // dp[i][j]:走到(i,j)的最小路径和
int main() {
cin >> n >> m;
// 读取矩阵
for (int i = 1; i <= n; i++) {
for (int j = 1; j <= m; j++) {
cin >> a[i][j];
}
}
// 初始化:将dp数组填充为无穷大,避免无效状态干扰
memset(dp, 0x3f, sizeof(dp));
// 起点的前序状态:dp[0][1] = 0(或dp[1][0] = 0),保证dp[1][1]计算正确
dp[0][1] = 0;
// 填表:从左到右,从上到下
for (int i = 1; i <= n; i++) {
for (int j = 1; j <= m; j++) {
// 统一转移方程:不需要判断边界(因为dp[0][j]和dp[i][0]都是无穷大,不影响min结果)
dp[i][j] = min(dp[i-1][j], dp[i][j-1]) + a[i][j];
}
}
// 输出右下角的最小路径和
cout << dp[n][m] << endl;
return 0;
}代码解析:为什么用 "无穷大" 初始化?
- 无效状态(如
dp[0][j]、dp[i][0])表示**"无法到达的位置"** ,它们的路径和应该是无穷大;- 当计算第一行
dp[1][j]时,dp[i-1][j] = dp[0][j] = 无穷大,所以min(无穷大, dp[1][j-1])会自动取dp[1][j-1],符合 "第一行只能从左向右" 的逻辑;- 同理,第一列dp[i][1]会自动取dp[i-1][1],符合 "第一列只能从上向下" 的逻辑;
- 这种方式避免了单独写
if (i==1)或if (j==1)的判断,代码更简洁。
优化:滚动数组(空间 O (nm)→O (m))
观察转移方程:dp[i][j]只依赖上一行的dp[i-1][j]和同一行的dp[i][j-1],因此可用一维数组**dp[j]**存储,每次更新时覆盖上一行的状态。
优化后代码:
cpp
#include <iostream>
#include <cstring>
#include <algorithm>
using namespace std;
const int N = 510;
int n, m;
int a[N][N];
int dp[N]; // 一维数组:dp[j]表示当前行第j列的最小路径和
int main() {
cin >> n >> m;
for (int i = 1; i <= n; i++) {
for (int j = 1; j <= m; j++) {
cin >> a[i][j];
}
}
// 初始化:无穷大
memset(dp, 0x3f, sizeof(dp));
// 起点的前序状态:dp[0] = 0(因为第一行第一个元素dp[1] = min(dp[0], dp[0]) + a[1][1] = 0 + a[1][1])
dp[0] = 0;
// 填表:逐行处理,每行从左到右
for (int i = 1; i <= n; i++) {
// 处理当前行的第一个元素(j=1):只能从上一行的j=1下来
dp[1] = dp[1] + a[i][1];
// 处理当前行的其他元素(j>=2)
for (int j = 2; j <= m; j++) {
// dp[j](上一行的j)和dp[j-1](当前行的j-1)取min,加上当前元素
dp[j] = min(dp[j], dp[j-1]) + a[i][j];
}
}
cout << dp[m] << endl;
return 0;
}优化解析
- 逐行处理时,dp[j]初始存储的是上一行的dp[j](即
dp[i-1][j]);- 处理当前行
j=1时,只能从上一行j=1下来,所以dp[1] = dp[1](上一行) + a[i][1];- 处理
j>=2时,dp[j] = min (上一行的dp[j](未被覆盖), 当前行的dp[j-1](已计算)) + a ij,逻辑正确;- 空间从
O(nm)降至O(m),对于n=1e3、m=1e3的矩阵,内存占用从 1e6 降到 1e3,效果显著。
例题 3:"木" 迷雾森林(牛客网)------ 路径类 DP 的 "障碍迷宫题"
题目链接:https://ac.nowcoder.com/acm/problem/53675
题目描述:从左下角到右上角的路径计数
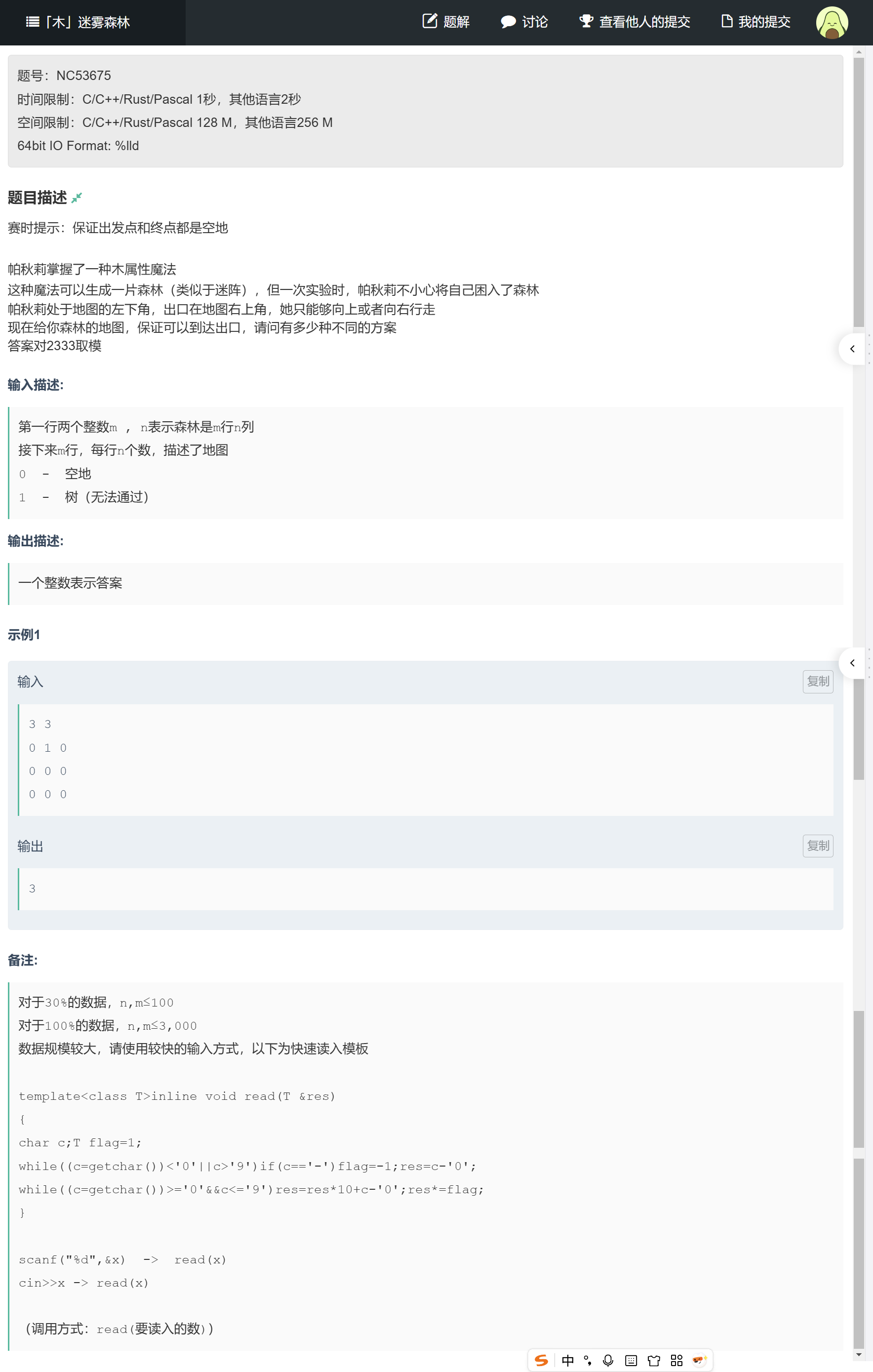
帕秋莉被困在m行n列的森林迷宫里,起点在左下角(m,1),出口在右上角(1,n),每次只能向上或向右走。迷宫中有 "树"(标记为 1),无法通过;"空地"(标记为 0)可通过。求从起点到出口的不同路径数,结果对 2333 取模。
输入:第一行是m和n(1≤m,n≤3000),后面m行是迷宫矩阵(0 或 1);
输出:路径数(对 2333 取模)。
示例输入:
3 3
0 1 0
0 0 0
0 0 0示例输出:3(路径:(3,1)→(3,2)→(3,3)→(2,3)→(1,3);(3,1)→(2,1)→(2,2)→(2,3)→(1,3);(3,1)→(2,1)→(1,1)→(1,2)→(1,3))
思路拆解(四步曲套用)
第一步:定义状态
迷宫路径计数问题,且有障碍,因此定义:dp[i][j] = 从起点(m,1)走到(i,j)的不同路径数(dp[i][j] = 0表示不可达)。
目标是dp[1][n](出口位置)。
第二步:推导状态转移方程
只能向上或向右走,且只有空地(a[i][j] = 0)才能走:
- 若**
a[i][j] = 1**(树):dp[i][j] = 0(不可达);- 若**
a[i][j] = 0** (空地):走到(i,j)的前一步是(i+1,j)(从下方上来)或(i,j-1)(从左方过来),因此路径数是两者之和:dp[i][j] = (dp[i+1][j] + dp[i][j-1]) % 2333
第三步:初始化
起点是(m,1)(左下角),因此:
- dp[m][1] = 1(起点本身有 1 种路径:原地不动);
- 为了避免边界判断(比如
i=m时i+1越界,j=1时j-1越界),可以在矩阵下方加一行(i=m+1),左侧加一列(j=0),并将dp[m+1][1] = 0(下方无路径)、dp[m][0] = 0(左侧无路径),但更简单的方式是直接初始化dp[m][0] = 1(让dp[m][1] = dp[m+1][1](0) + dp[m][0](1) = 1)。
第四步:填表顺序
因为只能向上或向右走,且起点在(m,1)(下方),所以需要 "从下到上、从左到右" 填表:
- 从下到上:保证计算
dp[i][j]时,dp[i+1][j](下方)已计算;- 从左到右:保证计算
dp[i][j]时,dp[i][j-1](左侧)已计算。
代码实现(基础版:二维数组)
cpp
#include <iostream>
using namespace std;
const int N = 3010; // m和n最大3000,开3010足够
const int MOD = 2333;
int m, n;
int a[N][N]; // 迷宫矩阵(1:树,0:空地)
int dp[N][N]; // dp[i][j]:走到(i,j)的路径数
int main() {
// 读取输入(注意:题目中迷宫的行是m行,列是n列)
scanf("%d%d", &m, &n); // 用scanf更快,避免超时
for (int i = 1; i <= m; i++) {
for (int j = 1; j <= n; j++) {
scanf("%d", &a[i][j]);
}
}
// 初始化:起点(m,1)的左侧dp[m][0] = 1,保证dp[m][1] = dp[m+1][1](0) + dp[m][0](1) = 1
dp[m][0] = 1;
// 填表:从下到上(i从m到1),从左到右(j从1到n)
for (int i = m; i >= 1; i--) {
for (int j = 1; j <= n; j++) {
// 如果是树,路径数为0
if (a[i][j] == 1) {
dp[i][j] = 0;
} else {
// 路径数 = 下方路径数 + 左侧路径数(取模)
dp[i][j] = (dp[i+1][j] + dp[i][j-1]) % MOD;
}
}
}
// 输出出口(1,n)的路径数
printf("%d\n", dp[1][n]);
return 0;
}代码解析:为什么用scanf而不是cin?
因为
m和n最大 3000,矩阵规模是3000×3000 = 9e6,cin默认速度较慢,可能导致超时;scanf速度更快,能避免超时问题(实际编程中,遇到大数据量时建议用scanf/printf)。
优化:滚动数组(空间 O (mn)→O (n))
观察转移方程:dp[i][j]只依赖下方dp[i+1][j](上一行的j)和左侧dp[i][j-1](当前行的j-1),因此可用一维数组**dp[j]**存储,每次从下到上更新时,覆盖上一行的状态。
优化后代码:
cpp
#include <iostream>
using namespace std;
const int N = 3010;
const int MOD = 2333;
int m, n;
int a[N][N];
int dp[N]; // 一维数组:dp[j]表示当前行第j列的路径数
int main() {
scanf("%d%d", &m, &n);
for (int i = 1; i <= m; i++) {
for (int j = 1; j <= n; j++) {
scanf("%d", &a[i][j]);
}
}
// 初始化:起点(m,1)的左侧dp[0] = 1
dp[0] = 1;
// 填表:从下到上(i从m到1),每行从左到右
for (int i = m; i >= 1; i--) {
// 处理当前行的第一个元素(j=1)
if (a[i][1] == 1) {
dp[1] = 0;
} else {
// 只能从下方(上一行的dp[1])过来
dp[1] = dp[1] % MOD;
}
// 处理当前行的其他元素(j>=2)
for (int j = 2; j <= n; j++) {
if (a[i][j] == 1) {
dp[j] = 0;
} else {
// dp[j](上一行的j,即下方路径数) + dp[j-1](当前行的j-1,即左侧路径数)
dp[j] = (dp[j] + dp[j-1]) % MOD;
}
}
}
printf("%d\n", dp[n]);
return 0;
}优化解析
- 从下到上处理每行时,dp[j]初始存储的是下一行(
i+1)的dp[j](即下方路径数);- 处理当前行
j=1时,只能从下方过来,所以dp[1] = 下一行的dp[1](若为树则置 0);- 处理
j>=2时,dp[j] = 下一行的dp[j](下方) + 当前行的dp[j-1](左侧),取模后更新;- 空间从
O(mn)降至O(n),对于m=3e3、n=3e3的矩阵,内存占用从 9e6 降到 3e3,极大节省资源。
例题 4:过河卒(洛谷 P1002)------ 路径类 DP 的 "障碍 + 特殊约束题"
题目链接:https://www.luogu.com.cn/problem/P1002

题目描述:卒避马的路径计数
棋盘上A点(0,0)有一个过河卒,要走到B点(n,m),每次只能向下或向右走。棋盘上C点(x,y)有一匹马,马所在的点和马跳跃一步可达的点(共 9 个点)是 "控制点",卒不能经过。求卒从A到B的不同路径数。
输入:一行四个整数n, m, x, y(1≤n,m≤20,0≤x,y≤20);
输出:路径数。
示例输入:
6 6 3 3示例输出:6(马在 (3,3),控制点覆盖周围 8 个点,卒需绕路走)
思路拆解(四步曲套用)
第一步:定义状态
卒的路径计数问题,且有 "马的控制点" 障碍,因此定义:dp[i][j] = 从(0,0)走到(i,j)的不同路径数(若(i,j)是控制点或越界,dp[i][j] = 0)。
目标是dp[n][m]。
第二步:推导状态转移方程
只能向下或向右走,且(i,j)必须不是控制点:
- 若
(i,j)是控制点:dp[i][j] = 0;- 若
(i,j)不是控制点:走到(i,j)的前一步是(i-1,j)(上方)或(i,j-1)(左侧),因此路径数是两者之和:dp[i][j] = dp[i-1][j] + dp[i][j-1]
第三步:初始化
- 起点
(0,0):若不是控制点,dp[0][0] = 1;若被马控制(比如马在 (0,0)),dp[0][0] = 0;- 边界处理 :第一行(
i=0)只能从左向右走,若(0,j)不是控制点,dp[0][j] = dp[0][j-1];第一列(j=0)只能从上向下走,若(0,j)不是控制点,dp[i][0] = dp[i-1][0];- 马的控制点:需要先标记出所有控制点(马的位置
(x,y)+ 马跳一步的 8 个位置:(x±2,y±1)、(x±1,y±2))。
第四步:填表顺序
从左到右、从上到下(因为dp[i][j]依赖dp[i-1][j](上一行)和dp[i][j-1](左侧))。
代码实现(基础版:二维数组 + 控制点标记)
cpp
#include <iostream>
#include <cmath> // 用于abs函数
using namespace std;
typedef long long LL; // 路径数可能很大,用long long避免溢出
const int N = 25; // n和m最大20,开25足够
int n, m, x, y;
LL dp[N][N]; // dp[i][j]:走到(i,j)的路径数
// 判断(i,j)是否是马的控制点
bool is_control(int i, int j) {
// 马的位置:(x,y)
if (i == x && j == y) return true;
// 马跳一步的8个位置:dx和dy的组合是(±2,±1)、(±1,±2)
int dx = abs(i - x);
int dy = abs(j - y);
return (dx == 2 && dy == 1) || (dx == 1 && dy == 2);
}
int main() {
cin >> n >> m >> x >> y;
// 初始化:起点(0,0)
if (!is_control(0, 0)) {
dp[0][0] = 1;
} else {
dp[0][0] = 0;
}
// 初始化第一行(i=0,j从1到m)
for (int j = 1; j <= m; j++) {
if (!is_control(0, j)) {
dp[0][j] = dp[0][j-1]; // 只能从左向右
} else {
dp[0][j] = 0;
}
}
// 初始化第一列(j=0,i从1到n)
for (int i = 1; i <= n; i++) {
if (!is_control(i, 0)) {
dp[i][0] = dp[i-1][0]; // 只能从上向下
} else {
dp[i][0] = 0;
}
}
// 填表:从左到右,从上到下
for (int i = 1; i <= n; i++) {
for (int j = 1; j <= m; j++) {
if (is_control(i, j)) {
dp[i][j] = 0;
} else {
dp[i][j] = dp[i-1][j] + dp[i][j-1];
}
}
}
cout << dp[n][m] << endl;
return 0;
}代码解析:为什么用long long?
当
n和m为 20 时,最大路径数是C(40,20) ≈ 137846528820,远超int的最大值(约 2e9),因此必须用long long存储,避免溢出。
优化:边界统一处理(避免单独初始化第一行 / 列)
和 "矩阵最小路径和" 类似,我们可以将dp数组的规模扩大一行一列(dp[0..n+1][0..m+1]),并将dp[1][0] = 1(起点(0,0)对应dp[1][1]),这样可以统一转移方程,不需要单独初始化第一行和第一列。
优化后代码:
cpp
#include <iostream>
#include <cmath>
using namespace std;
typedef long long LL;
const int N = 25;
int n, m, x, y;
LL dp[N][N];
bool is_control(int i, int j) {
// 注意:这里i和j是扩大后的坐标,需要减1对应原坐标
i--; j--;
if (i == x && j == y) return true;
int dx = abs(i - x);
int dy = abs(j - y);
return (dx == 2 && dy == 1) || (dx == 1 && dy == 2);
}
int main() {
cin >> n >> m >> x >> y;
// 扩大坐标:原(0,0)对应(1,1),dp[1][0] = 1(前序状态)
dp[1][0] = 1;
// 填表:从左到右,从上到下(i从1到n+1,j从1到m+1)
for (int i = 1; i <= n+1; i++) {
for (int j = 1; j <= m+1; j++) {
// 跳过起点的前序状态(i=1,j=0已处理)
if (i == 1 && j == 0) continue;
// 判断当前扩大后的坐标是否是控制点
if (is_control(i, j)) {
dp[i][j] = 0;
} else {
// 统一转移方程:dp[i-1][j](上方) + dp[i][j-1](左侧)
dp[i][j] = dp[i-1][j] + dp[i][j-1];
}
}
}
// 原(n,m)对应扩大后的(n+1,m+1)
cout << dp[n+1][m+1] << endl;
return 0;
}优化解析
- 扩大坐标后,原坐标
(i,j)对应新坐标(i+1,j+1),这样可以避免i=0或j=0时的越界判断;- dp[1][0] = 1:保证新坐标
(1,1)(原(0,0))的路径数为dp[0][1](0) + dp[1][0](1) = 1;- 统一转移方程后,不需要单独初始化第一行和第一列,代码更简洁。
三、路径类 DP 通用解题模板总结
通过以上 4 道例题,我们可以总结出路径类 DP 的通用解题模板,以后遇到这类题,直接套用即可:
1. 问题分析
- 确定地图结构:是二维矩阵、三角形、还是迷宫?
- 确定移动方向:只能向右 / 向下 / 向上 / 向左,或多方向?
- 确定目标:求最小 / 最大路径和、路径数,还是带约束的路径?
- 确定障碍:是否有不可达区域(如树、马的控制点)?
2. 状态定义
- 二维状态:
dp[i][j]= 走到(i,j)的目标值(路径和 / 路径数);- 一维状态(优化后):
dp[j]= 当前行第j列的目标值。
3. 转移方程推导
- 无障碍 + 单方向(右 / 下):dp[i][j] = min/max/sum(dp[i-1][j], dp[i][j-1]) + 权重(如矩阵元素);
- 有障碍:先判断
(i,j)是否可达,可达则按无障碍推导,不可达则dp[i][j] = 0(计数)或无穷大(最值);- 多方向(上 / 右):调整填表顺序(如从下到上),确保依赖的前序状态已计算。
4. 初始化
- 起点初始化 :
dp[起点坐标] = 1(计数)或起点权重(路径和);- 边界初始化:第一行 / 列按移动方向单独初始化,或扩大数组规模统一处理;
- 障碍初始化:标记所有不可达区域,初始化为 0 或无穷大。
5. 填表顺序
- 右 / 下方向:从左到右、从上到下;
- 上 / 右方向:从下到上、从左到右;
- 优化版(一维数组):根据依赖关系确定遍历方向(如从右向左避免覆盖)。
6. 优化技巧
- 空间优化:用一维数组替代二维数组(滚动数组),空间复杂度从
O(nm)降至O(m);- 时间优化:提前标记障碍,避免填表时重复判断;用
scanf/printf处理大数据量;- 边界优化:扩大数组规模,统一转移方程,避免单独处理第一行 / 列。
总结
路径类 DP 作为线性 DP 的重要分支,本质是 "用位置定义状态,用方向推导转移"。它的难点不在于逻辑复杂,而在于 "状态设计的合理性" 和 "边界处理的严谨性"------ 比如如何定义
dp[i][j]才能让转移方程自然成立,如何处理障碍和越界避免逻辑漏洞。最后,给大家一个小建议:刷题时不要急于看题解,先尝试自己套用 "四步曲"------ 先定义状态,再推导转移方程,最后写代码验证。遇到错误时,先检查状态定义是否合理,再看转移方程是否覆盖所有情况,最后排查边界和填表顺序。
路径类 DP 是后续学习更复杂 DP(如区间 DP、树形 DP)的基础,打好这个基础,后面的学习会事半功倍。希望这篇 5000 字的保姆级教程,能帮你彻底吃透路径类线性 DP,在算法路上更上一层楼!