边缘图像分割是通过检测图像中灰度、颜色或纹理的突变区域(边缘)来实现目标与背景分离的技术,是计算机视觉和图像处理的核心任务之一。本文系统介绍经典边缘检测算子、边缘连接策略及分割算法
一、边缘分割基本原理
1. 边缘定义与数学模型
边缘是图像中像素灰度值发生显著变化 的位置,对应物体轮廓或不同区域的边界。数学上,边缘可通过图像的梯度描述:
- 一阶导数:检测灰度突变(如Sobel、Prewitt算子)
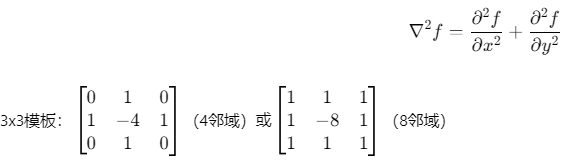
- 二阶导数:检测灰度极值点(如Laplacian算子),零交叉点对应边缘
二维图像f(x,y)f(x,y)f(x,y)的梯度向量为:
梯度幅值∣∇f∣∣∇f∣∣∇f∣反映边缘强度,方向
反映边缘走向。
2. 边缘分割流程
- 预处理:去噪(高斯滤波)、增强对比度
- 边缘检测:计算梯度,提取候选边缘点
- 边缘连接:将离散边缘点连接成连续轮廓
- 后处理:去除虚假边缘、细化轮廓
二、经典边缘检测算子
1. 一阶微分算子(梯度算子)
(1)Roberts算子
-
原理:用2x2模板计算对角线方向差分

-
优点:计算简单,对陡峭边缘敏感
-
缺点:对噪声敏感,边缘定位精度低
(2)Prewitt算子
-
原理:用3x3模板计算水平和垂直方向差分

-
优点:抑制噪声能力强于Roberts
-
缺点:边缘较粗,定位精度一般
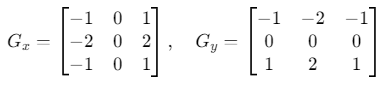
(3)Sobel算子
-
原理:加权差分模板(中心像素权重更高)
-
优点:边缘定位准确,抗噪性较好(最常用的一阶算子)
2. 二阶微分算子(Laplacian算子)
-
原理 :计算图像灰度的二阶导数,边缘对应拉普拉斯响应的零交叉点
-
优点:各向同性,边缘定位精确
-
缺点:对噪声极度敏感(需先高斯滤波)
3. Canny边缘检测算子(最优边缘检测器)
Canny提出边缘检测的三个标准:低错误率、高定位精度、单边缘响应。步骤如下:
-
高斯滤波:去噪(标准差σ控制平滑程度)
-
梯度计算 :用Sobel算子求GxG_xGx,GyG_yGy,得幅值

-
非极大值抑制:保留梯度方向上的局部极大值点(细化边缘)
-
双阈值检测:用高阈值Th(强边缘)和低阈值Tl(弱边缘,Tl≈0.4Th),连接强边缘与弱边缘
三、MATLAB实现:边缘检测与分割
1. 完整代码框架
matlab
%% 基于边缘的图像分割算法
% 功能:实现经典边缘检测算子、Canny算子、边缘连接与分割
clear; clc; close all;
%% 1. 图像读取与预处理
img = imread('cameraman.tif'); % 经典测试图像(灰度图)
if size(img,3)==3
img = rgb2gray(img); % 转为灰度图
end
img = im2double(img); % 转为double类型(0-1)
% 添加噪声(模拟实际场景)
noisy_img = imnoise(img, 'gaussian', 0, 0.01); % 高斯噪声(方差0.01)
% 高斯滤波去噪(σ=1.5)
filtered_img = imgaussfilt(noisy_img, 1.5);
%% 2. 经典边缘检测算子实现
% Sobel算子
sobel_x = [-1 0 1; -2 0 2; -1 0 1];
sobel_y = [-1 -2 -1; 0 0 0; 1 2 1];
Gx_sobel = imfilter(filtered_img, sobel_x, 'replicate');
Gy_sobel = imfilter(filtered_img, sobel_y, 'replicate');
mag_sobel = sqrt(Gx_sobel.^2 + Gy_sobel.^2); % 梯度幅值
edge_sobel = mag_sobel > 0.2; % 阈值分割(经验值0.2)
% Prewitt算子
prewitt_x = [-1 0 1; -1 0 1; -1 0 1];
prewitt_y = [-1 -1 -1; 0 0 0; 1 1 1];
Gx_prewitt = imfilter(filtered_img, prewitt_x, 'replicate');
Gy_prewitt = imfilter(filtered_img, prewitt_y, 'replicate');
mag_prewitt = sqrt(Gx_prewitt.^2 + Gy_prewitt.^2);
edge_prewitt = mag_prewitt > 0.2;
% Laplacian算子(需先高斯滤波,即LoG算子)
laplacian_kernel = [0 1 0; 1 -4 1; 0 1 0];
log_img = imfilter(filtered_img, laplacian_kernel, 'replicate');
edge_log = log_img > 0; % 零交叉点简化检测(实际需更复杂处理)
%% 3. Canny边缘检测(MATLAB内置函数+手动实现对比)
% 内置Canny函数
edge_canny_builtin = edge(filtered_img, 'Canny', [0.1 0.3]); % 双阈值[Th, Tl]
% 手动实现Canny算子
edge_canny_manual = canny_edge_detection(filtered_img, 1.5, 0.2, 0.5); % σ=1.5, Th=0.2, Tl=0.5
%% 4. 边缘连接与分割
% 基于边缘的区域生长(以Canny边缘为例)
segmented_img = edge_based_segmentation(filtered_img, edge_canny_manual);
%% 5. 结果可视化
visualize_results(noisy_img, filtered_img, edge_sobel, edge_prewitt, edge_log, ...
edge_canny_builtin, edge_canny_manual, segmented_img);
%% 6. 性能评估(边缘检测质量)
evaluate_edges(edge_canny_builtin, edge_canny_manual); % 对比内置与手动Canny2. 核心函数实现
(1)手动Canny边缘检测
matlab
function edge_map = canny_edge_detection(img, sigma, Th, Tl)
% 步骤1:高斯滤波
img_smoothed = imgaussfilt(img, sigma);
% 步骤2:计算梯度(Sobel算子)
[Gx, Gy] = imgradientxy(img_smoothed, 'sobel');
mag = sqrt(Gx.^2 + Gy.^2); % 梯度幅值
theta = atan2(Gy, Gx); % 梯度方向(弧度)
% 步骤3:非极大值抑制(细化边缘)
[rows, cols] = size(img);
suppressed = zeros(rows, cols);
angle = theta * 180 / pi; % 转为角度(-180~180)
angle(angle < 0) = angle(angle < 0) + 180; % 统一到0~180°
for i = 2:rows-1
for j = 2:cols-1
q = 255; r = 255; % 初始化邻域像素
% 根据梯度方向判断邻域
if (angle(i,j) >= 0 && angle(i,j) < 22.5) || (angle(i,j) >= 157.5 && angle(i,j) <= 180)
q = mag(i, j+1); r = mag(i, j-1); % 水平方向
elseif angle(i,j) >= 22.5 && angle(i,j) < 67.5
q = mag(i+1, j-1); r = mag(i-1, j+1); % 45°方向
elseif angle(i,j) >= 67.5 && angle(i,j) < 112.5
q = mag(i+1, j); r = mag(i-1, j); % 垂直方向
elseif angle(i,j) >= 112.5 && angle(i,j) < 157.5
q = mag(i-1, j-1); r = mag(i+1, j+1); % 135°方向
end
% 保留局部极大值
if mag(i,j) >= q && mag(i,j) >= r
suppressed(i,j) = mag(i,j);
end
end
end
% 步骤4:双阈值检测与边缘连接
strong_edges = suppressed > Th;
weak_edges = (suppressed >= Tl) & (suppressed <= Th);
edge_map = strong_edges; % 初始化强边缘
% 连接弱边缘(8邻域搜索强边缘)
[rows, cols] = size(edge_map);
for i = 2:rows-1
for j = 2:cols-1
if weak_edges(i,j)
neighborhood = edge_map(i-1:i+1, j-1:j+1);
if any(neighborhood(:)) % 邻域存在强边缘
edge_map(i,j) = 1;
end
end
end
end
end(2)边缘连接与区域生长分割
matlab
function segmented = edge_based_segmentation(img, edge_map)
% 基于边缘的区域生长:先填充边缘内部区域
segmented = img; % 初始化
mask = ~edge_map; % 非边缘区域为待分割区域
% 标记连通区域(8邻域)
[labels, num] = bwlabel(mask, 8);
% 为每个区域赋予平均灰度值(简化分割)
for i = 1:num
region = labels == i;
mean_val = mean(img(region));
segmented(region) = mean_val;
end
end(3)结果可视化函数
matlab
function visualize_results(noisy, filtered, edge_sobel, edge_prewitt, edge_log, ...
edge_canny_builtin, edge_canny_manual, segmented)
figure('Name', '边缘检测与分割结果', 'Position', [100, 100, 1400, 800]);
% 子图1:含噪图像
subplot(3,3,1); imshow(noisy); title('含噪图像(高斯噪声)');
% 子图2:滤波后图像
subplot(3,3,2); imshow(filtered); title('高斯滤波后图像(σ=1.5)');
% 子图3:Sobel边缘
subplot(3,3,3); imshow(edge_sobel); title('Sobel边缘检测');
% 子图4:Prewitt边缘
subplot(3,3,4); imshow(edge_prewitt); title('Prewitt边缘检测');
% 子图5:LoG边缘(高斯-Laplacian)
subplot(3,3,5); imshow(edge_log); title('LoG边缘检测');
% 子图6:内置Canny边缘
subplot(3,3,6); imshow(edge_canny_builtin); title('内置Canny边缘');
% 子图7:手动Canny边缘
subplot(3,3,7); imshow(edge_canny_manual); title('手动Canny边缘');
% 子图8:边缘连接与分割结果
subplot(3,3,8); imshow(segmented, []); title('边缘连接分割结果');
% 子图9:原图与分割结果对比
subplot(3,3,9); imshowpair(img, segmented, 'montage'); title('原图 vs 分割结果');
end四、算法对比与性能分析
1. 经典算子对比(以cameraman图像为例)
| 算子 | 抗噪性 | 边缘连续性 | 定位精度 | 计算复杂度 | 适用场景 |
|---|---|---|---|---|---|
| Roberts | 差 | 差 | 低 | 低 | 无噪声、陡峭边缘 |
| Prewitt | 中 | 中 | 中 | 中 | 轻度噪声图像 |
| Sobel | 良 | 良 | 高 | 中 | 通用场景(最常用) |
| Laplacian | 差 | 优 | 极高 | 低 | 需结合高斯滤波(LoG) |
| Canny | 优 | 优 | 极高 | 高 | 高精度边缘检测(首选) |
2. Canny算子参数影响
- 高斯滤波σ:σ增大→平滑增强(抗噪性↑,边缘模糊↓);σ减小→边缘细节↑(抗噪性↓)。建议σ=0.5~2.0。
- 双阈值Th/Tl :Th/Tl增大→边缘减少(漏检↑);Th/Tl减小→边缘增多(误检↑)。推荐Th=0.20.5,Tl=0.10.3Th。
五、扩展:高级边缘分割算法
1. 基于活动轮廓模型(Snake算法)
- 原理:通过能量最小化驱动曲线(轮廓)向目标边缘演化,能量包括内部弹性力(平滑)和外部图像力(边缘吸引)。
- MATLAB实现 :
activecontour函数(需二值边缘图作为输入)。
2. 基于深度学习的边缘检测
- 代表模型:HED(Holistically-Nested Edge Detection)、RCF(Rich Feature Hierarchies for Edge Detection)。
- 优势:自动学习边缘特征,适应复杂场景(如弱边缘、遮挡边缘)。
3. 多尺度边缘检测
- 原理:在不同尺度(σ)下检测边缘,融合多尺度结果(如小σ检测细节,大σ检测全局轮廓)。
六、应用场景
- 医学图像分割:CT/MRI图像中器官轮廓提取(如肿瘤边界)
- 自动驾驶:车道线检测、行人轮廓分割
- 工业检测:零件缺陷边缘定位、印刷品质量检测
- 遥感图像:地物边界提取(如道路、河流)
参考代码 基于边缘图像分割算法 www.youwenfan.com/contentcsn/83448.html
七、总结
基于边缘的图像分割算法通过检测灰度突变实现目标分离,核心是边缘检测算子 与边缘连接策略。经典算子(Sobel、Canny)仍是工程实践的主流,而Canny算子因兼顾抗噪性与定位精度,成为高精度边缘检测的首选。实际应用中需注意:
- 预处理(去噪)对边缘质量至关重要;
- 参数(如Canny阈值)需根据具体场景调整;
- 复杂场景需结合区域生长、活动轮廓等后处理提升分割完整性。