视觉SLAM十四讲解读-(v2.p84)李代数求导
1. 问题背景和目标
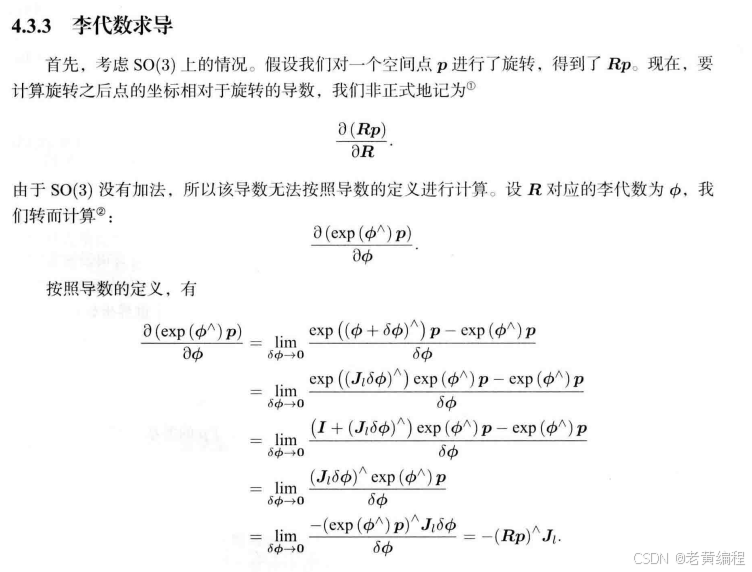
在考虑 SO(3)SO(3)SO(3) 上的情况时,对空间点 p\boldsymbol{p}p 进行旋转得到 RpR\boldsymbol{p}Rp,目标是计算旋转之后点的坐标相对于旋转矩阵 RRR 的导数 ∂(Rp)∂R\frac{\partial(R\boldsymbol{p})}{\partial R}∂R∂(Rp)。由于 SO(3)SO(3)SO(3) 没有加法,不能按导数定义直接计算,所以通过将 RRR 对应的李代数记为 ϕ\phiϕ,转而计算 ∂(exp(ϕ∧)p)∂ϕ\frac{\partial(\exp(\phi^{\wedge})\boldsymbol{p})}{\partial \phi}∂ϕ∂(exp(ϕ∧)p)。
2. 根据导数定义展开
按照导数的定义:
∂(exp(ϕ∧)p)∂ϕ=limδϕ→0exp((ϕ+δϕ)∧)p−exp(ϕ∧)pδϕ\frac{\partial(\exp(\phi^{\wedge})\boldsymbol{p})}{\partial \phi}=\lim_{\delta\phi \to 0}\frac{\exp((\phi + \delta\phi)^{\wedge})\boldsymbol{p}-\exp(\phi^{\wedge})\boldsymbol{p}}{\delta\phi}∂ϕ∂(exp(ϕ∧)p)=limδϕ→0δϕexp((ϕ+δϕ)∧)p−exp(ϕ∧)p
这一步是导数定义的基本应用,分子是函数在 ϕ+δϕ\phi+\delta\phiϕ+δϕ 和 ϕ\phiϕ 处的函数值之差,分母是自变量的增量 δϕ\delta\phiδϕ,通过取极限 δϕ→0\delta\phi\to0δϕ→0 来得到导数。
3. 利用李代数指数映射的性质
根据李代数指数映射的性质 exp((ϕ+δϕ)∧)=exp((Jlδϕ)∧)exp(ϕ∧)\exp((\phi+\delta\phi)^{\wedge})=\exp((J_l\delta\phi)^{\wedge})\exp(\phi^{\wedge})exp((ϕ+δϕ)∧)=exp((Jlδϕ)∧)exp(ϕ∧)(这里 JlJ_lJl 是左雅可比矩阵),则:
limδϕ→0exp((ϕ+δϕ)∧)exp(ϕ∧)p−exp(ϕ∧)pδϕ=limδϕ→0exp((Jlδϕ)∧)exp(ϕ∧)p−exp(ϕ∧)pδϕ\lim_{\delta\phi \to 0}\frac{\exp((\phi + \delta\phi)^{\wedge})\exp(\phi^{\wedge})\boldsymbol{p}-\exp(\phi^{\wedge})\boldsymbol{p}}{\delta\phi}=\lim_{\delta\phi \to 0}\frac{\exp((J_l\delta\phi)^{\wedge})\exp(\phi^{\wedge})\boldsymbol{p}-\exp(\phi^{\wedge})\boldsymbol{p}}{\delta\phi}limδϕ→0δϕexp((ϕ+δϕ)∧)exp(ϕ∧)p−exp(ϕ∧)p=limδϕ→0δϕexp((Jlδϕ)∧)exp(ϕ∧)p−exp(ϕ∧)p
此步骤利用了上述指数映射的性质,将 exp((ϕ+δϕ)∧)\exp((\phi+\delta\phi)^{\wedge})exp((ϕ+δϕ)∧) 进行了替换,以便后续化简。
4. 利用近似和单位矩阵性质
当 δϕ\delta\phiδϕ 很小时,exp((Jlδϕ)∧)≈I+(Jlδϕ)∧\exp((J_l\delta\phi)^{\wedge})\approx\boldsymbol{I}+(J_l\delta\phi)^{\wedge}exp((Jlδϕ)∧)≈I+(Jlδϕ)∧(这是指数映射在小量情况下的近似展开),则:
limδϕ→0(I+(Jlδϕ)∧)exp(ϕ∧)p−exp(ϕ∧)pδϕ\lim_{\delta\phi \to 0}\frac{(\boldsymbol{I}+(J_l\delta\phi)^{\wedge})\exp(\phi^{\wedge})\boldsymbol{p}-\exp(\phi^{\wedge})\boldsymbol{p}}{\delta\phi}limδϕ→0δϕ(I+(Jlδϕ)∧)exp(ϕ∧)p−exp(ϕ∧)p
=limδϕ→0(Jlδϕ)∧exp(ϕ∧)pδϕ=\lim_{\delta\phi \to 0}\frac{(J_l\delta\phi)^{\wedge}\exp(\phi^{\wedge})\boldsymbol{p}}{\delta\phi}=limδϕ→0δϕ(Jlδϕ)∧exp(ϕ∧)p
这里先将 exp((Jlδϕ)∧)\exp((J_l\delta\phi)^{\wedge})exp((Jlδϕ)∧) 用近似式替换,然后对分子进行化简,Iexp(ϕ∧)p\boldsymbol{I}\exp(\phi^{\wedge})\boldsymbol{p}Iexp(ϕ∧)p 与 −exp(ϕ∧)p-\exp(\phi^{\wedge})\boldsymbol{p}−exp(ϕ∧)p 相消,剩下 (Jlδϕ)∧exp(ϕ∧)p(J_l\delta\phi)^{\wedge}\exp(\phi^{\wedge})\boldsymbol{p}(Jlδϕ)∧exp(ϕ∧)p。
5. 利用反对称矩阵性质
根据反对称矩阵性质 a∧b=−b∧aa^{\wedge}b=-b^{\wedge}aa∧b=−b∧a,则 (Jlδϕ)∧exp(ϕ∧)p=−exp(ϕ∧)p∧Jlδϕ(J_l\delta\phi)^{\wedge}\exp(\phi^{\wedge})\boldsymbol{p}= - \exp(\phi^{\wedge})\boldsymbol{p}^{\wedge}J_l\delta\phi(Jlδϕ)∧exp(ϕ∧)p=−exp(ϕ∧)p∧Jlδϕ,所以:
limδϕ→0(Jlδϕ)∧exp(ϕ∧)pδϕ=limδϕ→0−(exp(ϕ∧)p)∧Jlδϕδϕ=−(Rp)∧Jl\lim_{\delta\phi \to 0}\frac{(J_l\delta\phi)^{\wedge}\exp(\phi^{\wedge})\boldsymbol{p}}{\delta\phi}=\lim_{\delta\phi \to 0}\frac{-(\exp(\phi^{\wedge})\boldsymbol{p})^{\wedge}J_l\delta\phi}{\delta\phi}=-(R\boldsymbol{p})^{\wedge}J_llimδϕ→0δϕ(Jlδϕ)∧exp(ϕ∧)p=limδϕ→0δϕ−(exp(ϕ∧)p)∧Jlδϕ=−(Rp)∧Jl
这一步先利用反对称矩阵性质对分子进行变形,然后分子分母中的 δϕ\delta\phiδϕ 在取极限时,δϕδϕ=1\frac{\delta\phi}{\delta\phi}=1δϕδϕ=1,最终得到结果 −(Rp)∧Jl-(R\boldsymbol{p})^{\wedge}J_l−(Rp)∧Jl,其中 R=exp(ϕ∧)R = \exp(\phi^{\wedge})R=exp(ϕ∧)。
综上,通过以上详细推导步骤,得到了 ∂(exp(ϕ∧)p)∂ϕ=−(Rp)∧Jl\frac{\partial(\exp(\phi^{\wedge})\boldsymbol{p})}{\partial \phi}=-(R\boldsymbol{p})^{\wedge}J_l∂ϕ∂(exp(ϕ∧)p)=−(Rp)∧Jl,也就是旋转之后点的坐标相对于旋转李代数的导数表达式。