目录

1.摘要
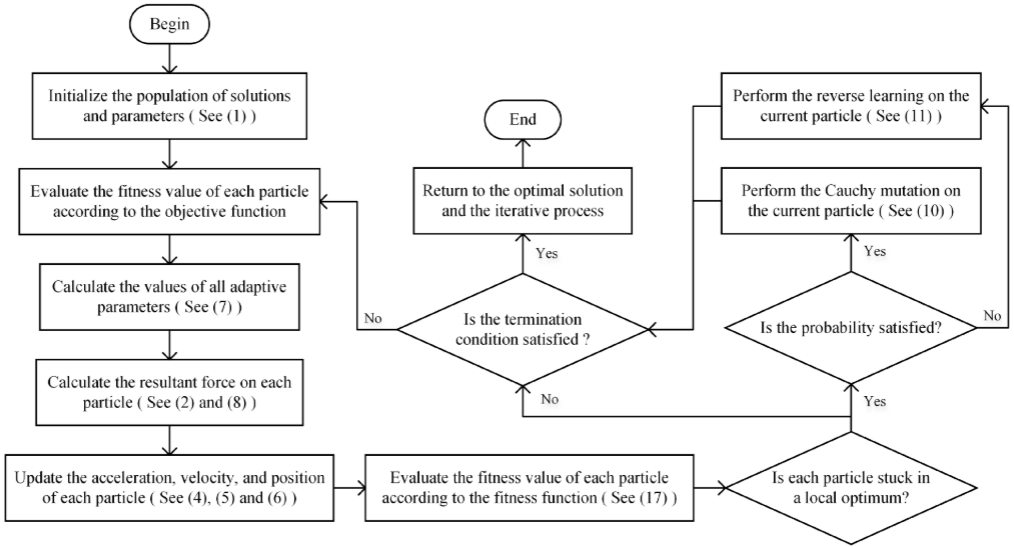
本文针对人工电场算法(AEFA)在优化性能和应用范围方面的不足,提出了一种改进人工电场算法(I-AEFA),并将其成功应用于三维复杂环境下的机器人路径规划问题。该算法通过引入参数自适应、反向学习和柯西变异三种机制,显著增强了种群的全局搜索能力与收敛精度。在此基础上,构建了精确的三维地形模型,并结合三次样条插值方法,实现了机器人全局路径的高效规划。通过大量虚拟仿真实验与硬件在环仿真,对不同改进机制、控制点数量以及单机器人与多机器人场景下的算法性能进行了系统评估。
2.改进人工电场算法
AEFA自适应参数
AEFA 中所有粒子同时施力易造成合力相互抵消,导致早期全局搜索能力不足、后期收敛缓慢。为改善探索与开发的平衡,本文仅选取每代适应度排名前P%的粒子参与施力,从而增强全局探索能力并加快收敛速度。
P ( t ) = P 0 + ( 100 − P 0 ) × ( 1 − t / T ) P\left(t\right)=P_0+\left(100-P_0\right)\times\left(1-t/T\right) P(t)=P0+(100−P0)×(1−t/T)
当前粒子所受合力:
F i d ( t ) = ∑ j = 1 , j ≠ i r o u n d ( P ( t ) × N / 100 ) r a n d j F i j d ( t ) F_i^d(t)=\sum_{j=1,j\neq i}^{\mathrm{round}(P(t)\times N/100)}\mathrm{rand}jF{ij}^d(t) Fid(t)=j=1,j=i∑round(P(t)×N/100)randjFijd(t)
柯西变异,反向学习常见,略。
3.路径规划
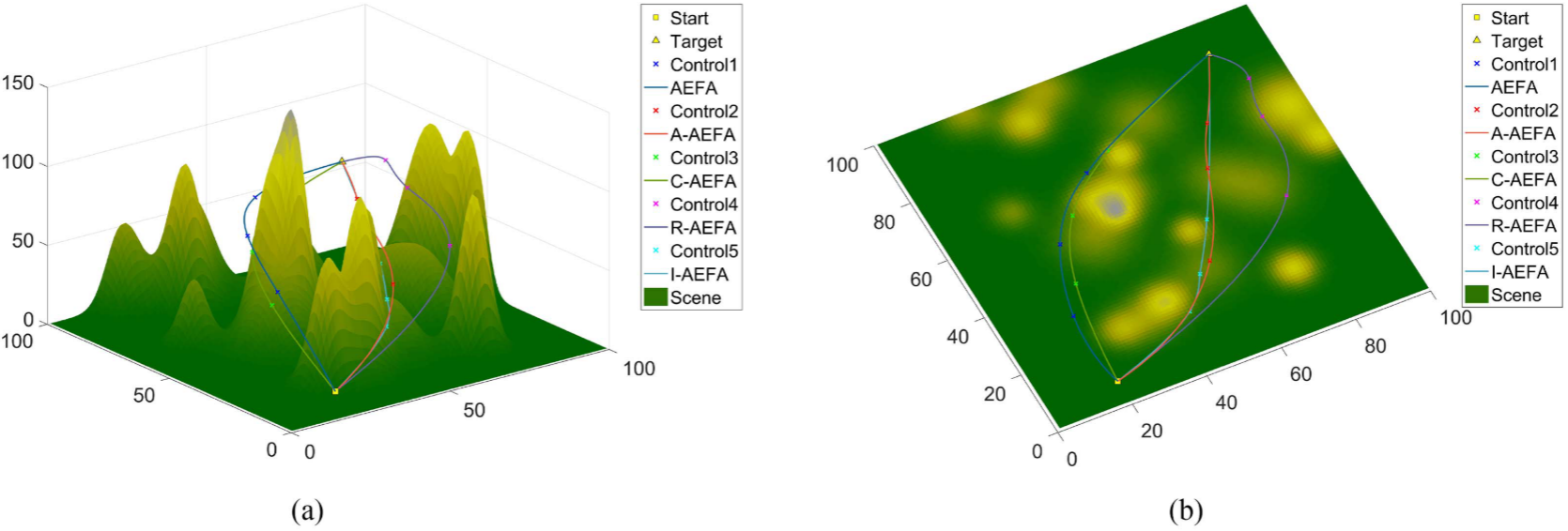
论文通过基准地形模型构建三维环境,利用控制点与三次样条插值实现路径表示与平滑,并在此基础上设计约束条件和适应度函数以求解最优路径。
Z ( x , y ) = ∑ i = 1 J H i exp − ( x − x i X d i ) 2 − ( y − y i Y d i ) 2 Z\begin{pmatrix}x,y\end{pmatrix}=\sum_{i=1}^JH_i\exp\left-\\left(\\frac{x-x_i}{X_{di}}\\right)\^2-\\left(\\frac{y-y_i}{Y_{di}}\\right)\^2\\right Z(x,y)=i=1∑JHiexp−(Xdix−xi)2−(Ydiy−yi)2
采用三维控制点与三次样条插值实现路径表示与平滑,确保曲率与挠率连续;在此基础上设置高度避障、多机器人避碰及边界约束,并综合路径长度与平滑性构建适应度函数,实现安全高效的最优路径规划。
min(fitness) = min ω 1 ( L 1 + L 2 + ... L n ) + ω 2 ( C 1 + C 2 + ... C n ) + ω 3 ( T 1 + T 2 + ... T n ) + ω 4 ( R 1 + R 2 + ... R n ) \begin{aligned}&\text{min(fitness)}\\&\left.=\min\left\\begin{array}{c}\\omega_1\\left(L_1+L_2+\\ldots L_n\\right)+\\omega_2\\left(C_1+C_2+\\ldots C_n\\right)\\\\+\\omega_3\\left(T_1+T_2+\\ldots T_n\\right)+\\omega_4\\left(R_1+R_2+\\ldots R_n\\right)\\end{array}\\right.\\right\end{aligned} min(fitness)=minω1(L1+L2+...Ln)+ω2(C1+C2+...Cn)+ω3(T1+T2+...Tn)+ω4(R1+R2+...Rn)
其中, L i 、 C i 、 T i L_i、C_i、T_i Li、Ci、Ti和 R i R_i Ri分别表示第 i i i个机器人的路径长度、最大曲率、最大挠率和碰撞威胁值, ω 1 \omega_1 ω1、 ω 2 \omega_2 ω2、 ω 3 \omega_3 ω3与 ω 4 \omega_4 ω4为对应指标的权重系数。
4.结果展示
5.参考文献
1 Tang J, Pan Q, Chen Z, et al. An improved artificial electric field algorithm for robot path planningJ. IEEE Transactions on Aerospace and Electronic Systems, 2024, 60(2): 2292-2304.
6.代码获取
xx
7.算法辅导·应用定制·读者交流
xx