2025.12.25
这篇文章发表于《Medical Image Analysis》期刊(2026 年第 109 卷),由慕尼黑工业大学、智利天主教大学等机构学者联合撰写,聚焦动态磁共振成像(MRI)的快速重建问题,提出一种基于自监督 k 空间正则化的神经隐式表示方法 PISCO。
Title 题目
01
PISCO: Self-supervised k-space regularization for improved neural implicit k-space representations of dynamic MRI
PISCO:用于改进动态MRI神经隐式k空间表示的自监督k空间正则化
文献速递介绍
02
磁共振成像(MRI)面临采集时间长的问题,这限制了其时空分辨率,尤其是在需要按不同运动状态(如心跳或呼吸)重建图像的动态应用中。传统方法通过沿时间维度正则化来恢复空间重建质量,但这会限制时间分辨率,并在高加速采集时导致过度平滑,丢失宝贵的时间信息,而高时间分辨率对于评估心脏动态或检测腹部病变至关重要。近年来,隐式神经表示(INR)作为一种学习离散数据连续表示的方法受到关注,它通过多层感知器(MLP)将输入坐标映射到信号值。NIK作为INR在k空间上的直接应用,避免了计算成本高的域变换,但其有效性高度依赖于足够的受试者特定数据。在高加速采集下,k空间中出现大间隙,特别是外围高频细节欠采样,这使得准确学习NIK表示变得困难,并可能导致过拟合或不真实的填充。现有的正则化方法多在图像域应用,将其直接用于NIK会丧失k空间训练的优势。受传统并行成像k空间冗余研究的启发,本文提出PISCO,一种自监督、免校准的k空间一致性条件,旨在改进NIK重建,特别是在高加速因子下。
Aastract摘要
02
神经隐式k空间表示(NIK)在实现高时间分辨率动态磁共振成像(MRI)方面展现了潜力。然而,缩短采集时间导致训练数据减少,从而引发过拟合和性能显著下降。为解决此问题,本文引入了一种新颖的自监督k空间损失函数LPISCO,用于正则化基于NIK的重建。该损失函数基于并行成像启发的自一致性(PISCO)概念,无需额外数据即可强制执行一致的全局k空间邻域关系。在静态和动态MR重建上的定量和定性评估表明,集成PISCO显著改善了NIK表示,使其成为一种有竞争力的动态重建方法,且不限制时间分辨率。特别是在高加速因子(R≥50)下,结合PISCO的NIK能避免现有方法的时间过度平滑问题,并实现卓越的时空重建质量。此外,对损失假设和稳定性进行的广泛分析表明,PISCO作为一种多功能的自监督k空间损失函数,在未来的应用和架构中具有巨大潜力。
Method 方法
03
本文提出的PISCO方法是对GRAPPA概念的改进,GRAPPA通过校准自校准信号(ACS)中的全局权重矩阵W来估计缺失的k空间值。然而,动态成像中往往无法获得完全采样的ACS。因此,PISCO将全局空间k空间关系概念重新表述为一种免校准条件:在一个理想的k空间中,从不同随机子集推导出的多个权重集Ws应该收敛到同一个全局线性关系W。PISCO通过构建一个自监督损失函数LPISCO来量化k空间的自一致性,而不是计算权重向量之间的距离(如LPISCO-dist),本文提出了一种基于残差的新型PISCO损失函数LPISCO-res。该方法通过测量由邻域关系估计的目标值与实际目标值之间的残差来衡量一致性,使其在优化过程中对噪声更敏感且单调递增,从而具有更好的收敛特性和稳定性。PISCO进一步集成到NIK的训练流程中,允许在训练过程中包含超出实际采集轨迹的额外k空间坐标,从而扩展了感知场,特别有利于k空间中存在大间隙的情况。训练时,首先用数据一致性损失(LDC)预训练NIK模型,以捕获粗略结构信息,之后再引入LPISCO进行细化。实验在准静态上肢、心脏电影和腹部呼吸分辨MRI数据集上进行,并详细探讨了PISCO的核设计(选择笛卡尔核)、权重求解(通过按k空间距离排序补丁对以提高稳定性)和一致性度量(选择残差基方法)等设计选择。
Discussion讨论
04
本文提出的PISCO是一种基于并行成像概念的自监督k空间一致性度量,可有效增强基于学习的MR重建,并通过多项消融/仿真研究验证了其收敛行为和作为动态MR重建中目标函数的适用性。PISCO无需额外数据即可学习改进的神经隐式表示,从而提高了时空图像质量,且LPISCO-res损失函数相比LPISCO-dist在计算时间上缩短了近50%。PISCO不仅限于动态重建,在简单的k空间拟合和静态上肢NIK学习中,PISCO都能减少欠采样伪影。然而,其性能提升仍受限于仅利用邻域约束,未来结合时间维度或多回波等冗余信息有望进一步增强正则化能力。在高加速因子下,NIK和ICoNIK由于过拟合噪声而面临挑战,而PISCO-res通过包含未知点和强制一致性来解决这一问题,表现出显著改进。与倾向于过度平滑的XD-GRASP相比,PISCO-res在高加速下能保持时间分辨率。PISCO-res使INR重建性能接近TD-DIP,同时保留了INR任意时空分辨率的关键优势。心脏电影数据集的离散和不连续特性限制了PISCO的性能,但在更具挑战性的腹部数据中,PISCO的优势更加明显,尤其在描绘精细解剖结构(如小血管和导管网络)方面。PISCO设计方面,笛卡尔核在一致性上表现最佳,而径向核则表现出更高变异性。核大小和距离具有灵活性,更大核可提供更广的感知野,但会增加计算开销。LPISCO-res相较于LPISCO-dist具有更好的收敛行为和更低的计算成本。PISCO的一些参数需根据具体应用进行调整,未来可探索自动适应参数以提高通用性。PISCO在高加速下提升NIK重建的潜力有助于缩短临床方案时间,为需要高时间分辨率的应用(如快速运动估计)开辟新途径。局限性方面,虽然PISCO框架有效提升了重建质量,但核大小、权重因子和子集数量等设计方面仍有待进一步优化,尤其需要自动化和自适应配置。PISCO评估k空间估计质量,但需与数据一致性约束结合才能实现最优重建。NIK作为INR方法,依赖于每受试者优化,导致训练时间长于卷积方法,提升训练速度以实现高效3D重建至关重要。此外,数据集的局限性体现在心脏数据集的时间连续性被分箱限制,而腹部数据集的呼吸运动不规则性需要更先进的时间编码策略。未来研究需在更广泛的采集策略、解剖区域和对比度设置下评估PISCO的普适性,并进行临床效用评估。
Conclusion结论
05
本文展示了如何将传统并行成像概念改编为一种自监督一致性度量(PISCO),从而增强基于学习的MR重建。PISCO的免校准和灵活设计使其能够无缝集成到训练过程中,并有望应用于其他解剖结构或基于k空间的重建技术。
Results结果
06
PISCO设计选择的验证结果显示,在理想k空间上,只有笛卡尔核设计能实现各子集权重向量的一致性(图3A),而径向核和等距径向核表现出较高变异性。权重求解方面,将补丁对按其k空间距离排序可以显著减少权重估计中的噪声和方差(图3B),使得PISCO条件更稳定。一致性度量方面,基于残差的PISCO损失(LPISCO-res)在图像空间和k空间噪声增加时均呈现单调递增趋势,且对噪声更敏感,这使其在优化过程中比基于距离的损失(LPISCO-dist)更具可行性(图3C)。PISCO收敛性验证表明,即使不依赖任何时间冗余,PISCO也能有效填充k空间欠采样间隙,并提高重建图像的清晰度、PSNR和FSIM值,减少欠采样伪影(图3D)。在NIK正则化应用中:对于上肢准静态数据,NIK在高加速下性能显著下降,PISCO-dist改善有限,而PISCO-res则能显著减少噪声,恢复血管细节,并提高PSNR和FSIM(图4)。在心脏电影数据集中,PISCO在所有加速因子下均持续优于NIK和PISCO-dist,尤其在高加速因子(R52/R104)下,NIK和PISCO-dist的时空性能急剧下降,而PISCO-res能实现与XD-GRASP25相当甚至更优的空间重建质量,并更好地模拟时间动态(图5、图6)。PISCO-res的重建性能与TD-DIP512最为接近,同时更节省内存且与分辨率无关。在腹部呼吸分辨数据集中,虽然XD-GRASP在4MS下优先考虑空间分辨率但牺牲了动态信息,且XD-GRASP50动态描绘改善但受噪声和欠采样影响,TD-DIP丢失血管细节,但PISCO-res在保持高时空分辨率的同时,进一步平滑了结果,并保持了更清晰的血管结构(图7)。PISCO-res还显著缩短了训练时间,且INR方法分辨率无关的特点使其模型内存占用远低于DIP方法。
Figure 图
07
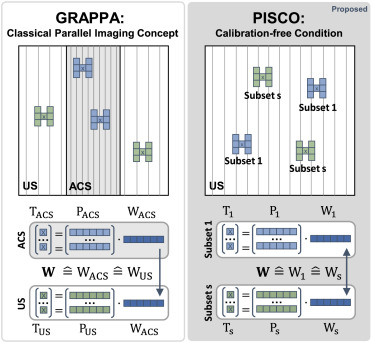
图1.从GRAPPA(Griswold等人,2002)到提出的PISCO:GRAPPA(左图)在一个完全采样的自校准k空间(ACS,灰色区域,公式(1))上校准一个权重向量WACS,其中灰色线条表示采样的k空间点。该向量确定了全局邻域关系W,并用于在欠采样k空间(US,白色区域)中推导出目标点。对于PISCO(右图),多个随机目标和补丁子集(Ts和Ps)被采样以求解Ws(公式(3))。并行成像启发的自一致性(PISCO)条件指出,对于一个理想的k空间,所有这些权重向量都应该平等地收敛于一个单一的全局邻域关系W(公式(4))。
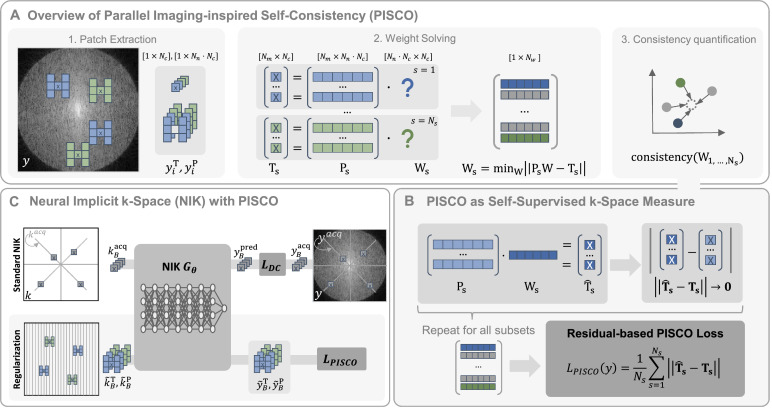
图2.方法概述(A/B/C分别对应第3A/B/C节)。为简化起见,未可视化线圈维度,但矩阵大小已指示。 (A) PISCO:1. 从k空间y中,采样多个子集(一种颜色一个子集),包括目标yiT和补丁yiP对。补丁由相邻值组成,可以假定任何采样形状(见4.2.1节)。2. 每个子集被重塑为线性方程组,并用于使用公式(3)求解邻域关系向量Ws(见4.2.2节)。3. k空间y的PISCO自一致性可以通过所有子集权重向量进行量化,例如,计算距离(Spieker等人,2024a)或残差(本文提出,见B图)。 (B) 基于残差的PISCO作为自监督k空间度量:对于每个子集s,Ws用于仅从其邻域Ps估计目标T^s,并计算与y的实际目标Ts的残差。PISCO损失被确定为所有这些残差的加权和。(C) PISCO集成到NIK训练中:顶部的"监督"部分代表经典的NIK训练(Huang等人,2023),其中对实际采集的坐标进行采样、预测,并使用LDC与采集信号进行比较。通过PISCO,NIK的感知场可以在训练期间扩展,因为可以采样任何补丁(独立于采集轨迹)并用于自监督LPISCO计算。在本研究中,补丁从笛卡尔网格中采样,并在x和y维度上交替欠采样(仅可视化y维度)。
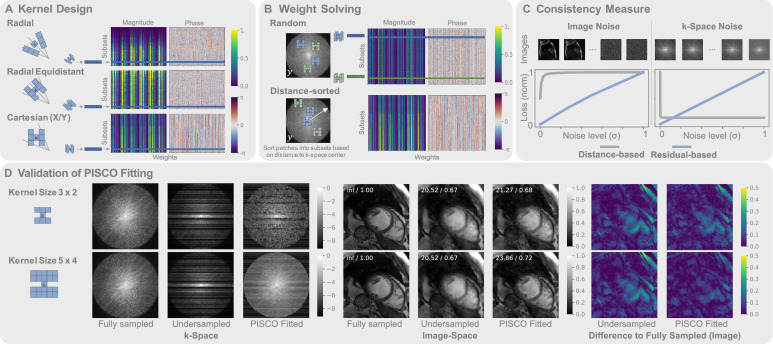
图3.PISCO验证结果。(A) 核设计:对于每种核几何形状,采样多个补丁子集(一个示例以蓝色显示),并求解权重(深蓝色向量)。所有权重向量的幅度和相位堆叠在图中。为验证PISCO条件,所有权重向量应得到相同的解,例如,预期出现垂直模式。只有笛卡尔核(在y方向显示,但在x方向(旋转90°)结果相同)满足此条件。(B) 权重求解:子集权重的解(幅度和相位)垂直堆叠(绿色和蓝色向量是两个示例)。顶部:子集由随机采样的补丁组成。底部:采样的补丁从k空间中心到外侧(白色箭头)排序,然后分成子集。这导致具有相似k空间幅度的补丁子集,从而整体上产生更少噪声的权重向量解。(C) 一致性度量:通过在图像空间(左图)和k空间(右图)中添加递增噪声来模拟非理想k空间。在相应的k空间上,计算基于距离(Spieker等人,2024a)和基于残差(本文提出)的PISCO损失,并按最大损失值进行归一化。对于图像噪声,两种损失都单调增加,而基于残差的损失始终敏感。对于k空间噪声,只有基于残差的损失单调增加,使其可用于优化以达到理想k空间(其中σ=0)。(D) PISCO拟合验证:PISCO拟合欠采样k空间的结果(k空间左图,图像中间图)。在k空间内,包含PISCO可以在没有任何额外知识的情况下推导出缺失的k空间线。独立于核大小,与原始欠采样图像相比,使用PISCO的重建结果导致欠采样减少,这在图像(中间图)以及定量PSNR/FSIM结果和差异图像(右图)中定性可见。更大的核(5x4,底部)增加了感知场并填充了更多缺失的k空间线,但由于更多的未知核权重Nw也需要更多的计算能力。

图4.静态上肢:两个示例加速因子(R10/20)的定性和定量结果。NIK重建结果的噪声随加速增加,尤其是在重建中心区域。PISCO-dist对重建的改善微乎其微,仍存在噪声。而本文提出的PISCO-res学习到了更好的隐式表示,从而减少了噪声并使结构更清晰(PSNR和FSIM↑)。
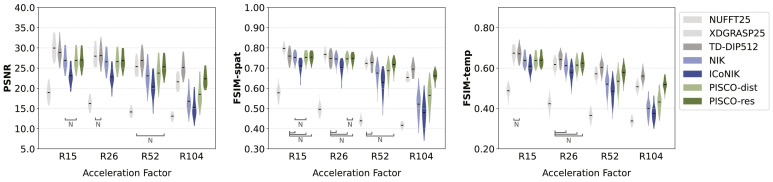
图5.心脏电影:30名受试者在加速因子R15/R26/R52/R104下的定量重建结果(PISCO-dist/PISCO-res重建的λ分别为0.01/0.05/0.1/0.15)。对于R15,XD-GRASP25提供噪声最少的重建(PSNR),并具有高空间和时间分辨率(FSIM-spat/FSIM-temp)。对于R26,NIK、PISCO-dist和PISCO-res导致相似的时间结果。在更大的加速因子下,XD-GRASP25的性能下降,NIK也迅速下降。PISCO-dist优于NIK,但未达到XD-GRASP25。然而,与所有其他方法(R>26)相比,纳入本文提出的PISCO-res显著改善了时间结构。同时,与XD-GRASP25相比,空间重建质量得以保持(R52)甚至显著改善(R104)。所有比较,除了标有"N"的,都具有统计学意义(采用Friedman检验,随后使用Wilcoxon符号秩检验并进行错误发现率(FDR)校正作为事后检验,显著性水平设定为p<0.05)。
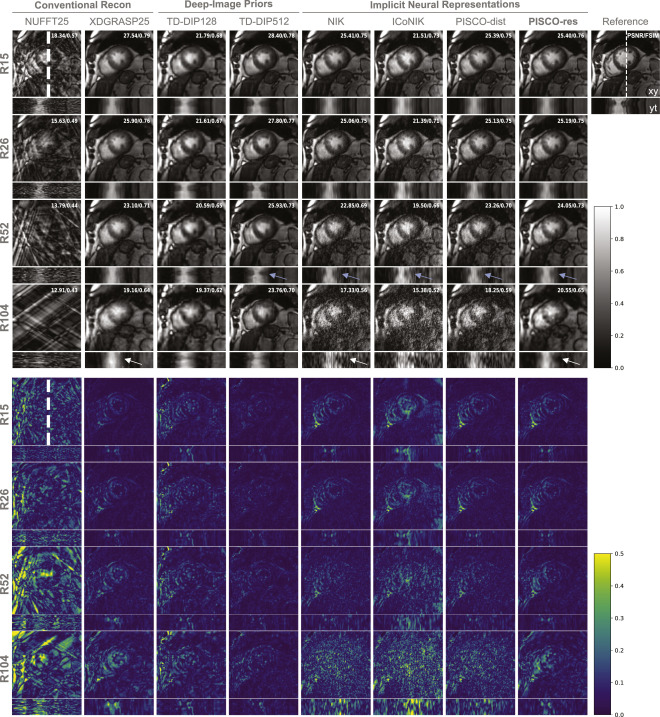
图6心脏电影:一名受试者在四种加速因子下的定性重建结果。参考重建(R1)显示在右上角(xy),白色虚线标记了提取时间剖面(yt)的切片。完整的动态重建视频(xyt)可在补充材料中找到。在较低加速因子(R15/26)下,XD-GRASP似乎有足够数据恢复空间信息,但在较高加速因子(R52/R104)下,它开始在时间域过度平滑(白色箭头)。DIP方法保留了时间信息,但需要更高的输出分辨率(TD-DIP512)才能获得无模糊的空间图像。INR基NIK在R26时开始出现噪声,而PISCO-res可以校正表示以接近TD-DIP的性能。当加速增加时,NIK、ICoNIK和PISCO-dist在空间和时间上都受到噪声增加的影响(分别参见差异图像和蓝色箭头)。特别是在高加速(R52+)下,PISCO-res在空间质量上与XD-GRASP25相似,并在时间质量上有所改善(白色箭头)。
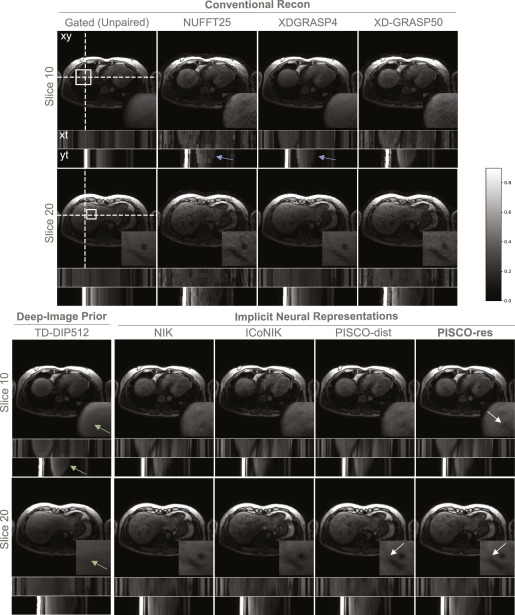
图7腹部 - 呼吸分辨:显示了两名受试者两个切片的定性重建结果:xy图像描绘了空间重建,而时间剖面(由白色虚线标记)表示下方的时间重建(xt/yt)。补充材料中可找到其他示例以及完整动态重建(xyt)的视频。门控重建(与其余部分不配对)不提供任何时间信息,并且仍然模糊(放大图)。尽管XD-GRASP4与NUFFT4相比改善了空间分辨率,但其时间分辨率仍然有限(蓝色箭头)。增加运动状态的数量(XD-GRASP50)导致更好的时间分辨率,但时空重建噪声更大。TD-DIP512在时间域进行了平滑,但在空间维度丢失了任何细节(绿色箭头)。NIK和ICoNIK也减少了时间维度的噪声,但在空间上仍然存在噪声。两种PISCO版本都进一步平滑了时空重建,而本文提出的PISCO-res保持了更清晰的血管结构(白色箭头)。
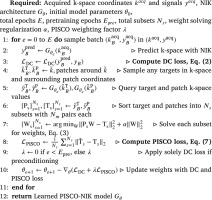
图8算法1. PISCO训练NIK的伪代码。所需:采集到的k空间坐标k^acq和信号y^acq,NIK架构Gθ,初始模型参数θ0,总epoch数E,预训练epoch数Epre,总子集数Ns,权重求解正则化参数α,PISCO权重因子Î>>