随着全球海上交通的迅猛增长,利用高分辨率遥感图像进行自动化海上监视,已成为保障海洋安全、管理交通流量和监控非法活动不可或缺的手段。船舶检测作为遥感图像分析的核心任务之一,不仅关乎海上运输效率,更直接影响到海上救援、国防安全和环境保护。然而,卫星图像中的船舶目标具有尺度极小、形态狭长、背景复杂等挑战,传统目标检测模型在此场景下往往"力不从心"。
今天,我们要介绍一篇来自韩国研究团队的精彩论文《LiM-YOLO: Less is More with Pyramid Level Shift and Normalized Auxiliary Branch for Ship Detection in Optical Remote Sensing Imagery》,它直击当前船舶检测模型的痛点,提出了一种"少即是多"的全新架构,不仅在精度上实现突破,还大幅降低了模型复杂度和计算成本。
论文链接: arxiv.org/abs/2512.09...
为什么船舶检测如此困难?
卫星图像中的船舶目标具有以下典型特征:
- 尺度极小: 在千米级高空拍摄的图像中,船舶可能只有几十甚至几个像素宽。
- 形态狭长: 船舶多为长条形,宽高比极大,容易被背景噪声淹没。
- 背景复杂: 海面波纹、云层、岛屿等干扰因素多,极易造成误检或漏检。

主流的YOLO架构(从v3到v12)普遍采用P3、P4、P5三层特征金字塔进行多尺度预测,其对应的下采样步长分别为8、16、32。
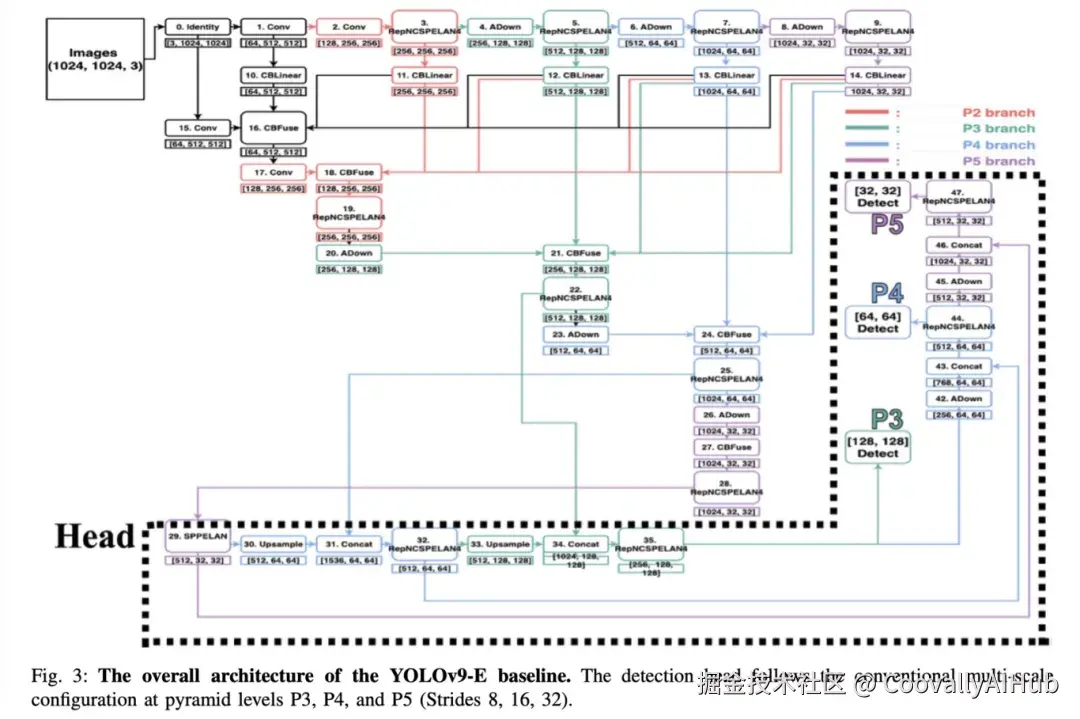
P3 (步长8):负责小目标,保留较多细节。
P5 (步长32):负责大目标,感受野大,语义信息强。
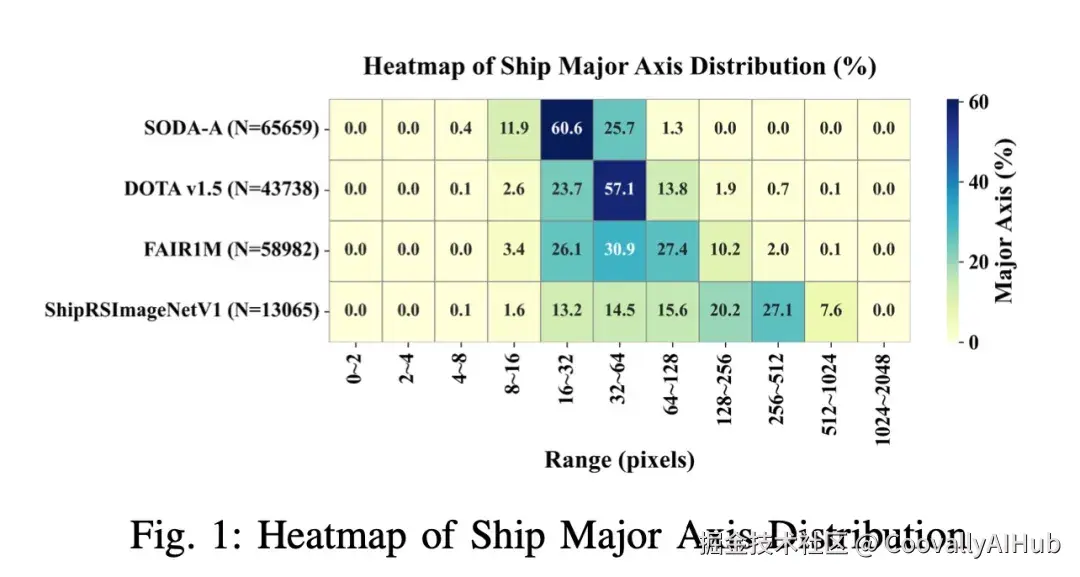
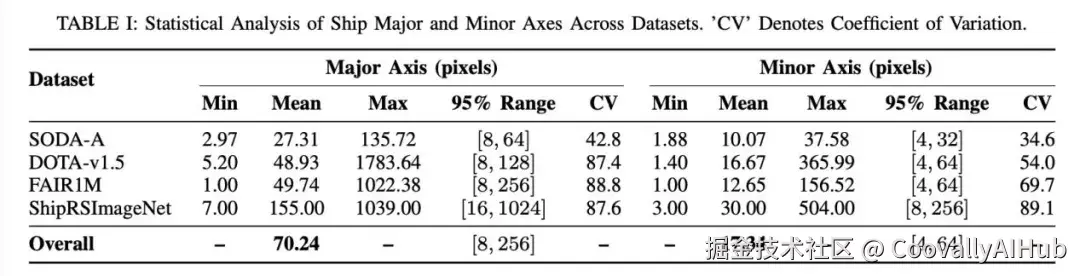
问题就出在这个P5层(步长32)上。论文通过对四大遥感船舶数据集(SODA-A, DOTA-v1.5, FAIR1M, ShipRSImageNet)的统计发现:
船舶的平均短轴长度仅有17.34像素。
对于步长32的P5层,平均船舶的短轴占据网格比ρ_minor = 17.34/32 ≈ 0.54 < 1。
这意味着什么?"平均大小"的船舶在P5层的特征图上,甚至无法占满一个网格单元! 其空间特征被严重稀释,与背景噪声混在一起,导致模型难以学习和定位。这就是所谓的空间特征稀释和亚像素混叠问题。
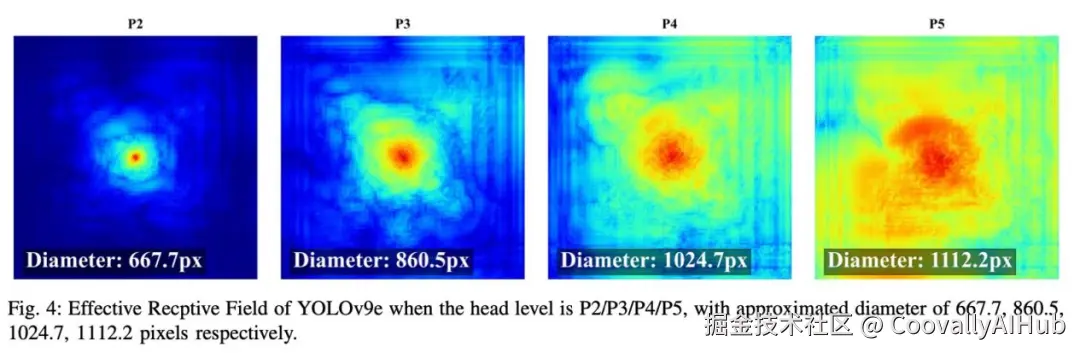
另一方面,P5层拥有巨大的理论感受野(超过2800像素),远超标准输入尺寸(如1024x1024)。其有效感受野也高达1112像素,足以覆盖整个图像的全局上下文。而P4层的有效感受野(约1024像素)已经可以做到这一点。因此,P5层在带来巨大计算量的同时,其提供的额外语义信息增益微乎其微,反而引入了过多的背景噪声。
结论:用于检测大目标的P5层,对于以中小型船舶为主的海事遥感检测任务,是结构冗余且有害的。
LiM-YOLO的核心创新:从"越多越好"到"少即是多"
LiM-YOLO的设计理念源于对四大数据集(SODA-A、DOTA-v1.5、FAIR1M-V2.0、ShipRSImageNet-V1)中船舶形态的统计分析。
面对上述问题,常见的改进思路是"做加法":在P3-P5的基础上,增加更浅的P2层(步长4) 来捕捉小目标细节,或者增加更深的P6层来获取更大感受野。但这只是"扩充",并未解决P5层固有的冗余和噪声问题。
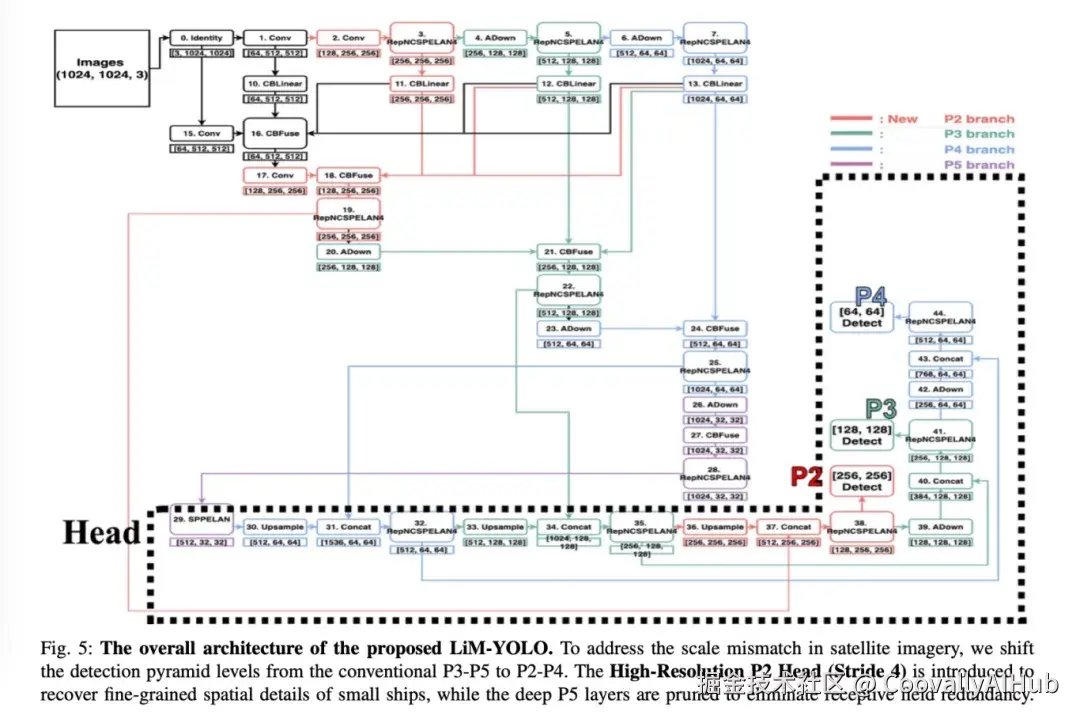
LiM-YOLO则反其道而行之,提出了 "金字塔层级移位策略":
1.做减法,去冗余:完全移除P5层的骨干网络和检测头,省去不必要的深层计算和背景噪声。
2.做加法,补精度:引入高分辨率的P2层(步长4) 作为新的检测起点。
3.新配置:将检测金字塔从传统的 P3-P4-P5 重构为 P2-P3-P4。
这一移一换,效果显著:
- 对于小目标: P2的步长为4,即使对于数据集中95%分位数下最小的船舶(短轴约4像素),也能满足ρ_minor ≥ 1,确保其空间形态能被有效采样,满足奈奎斯特采样定理,避免了特征混叠。
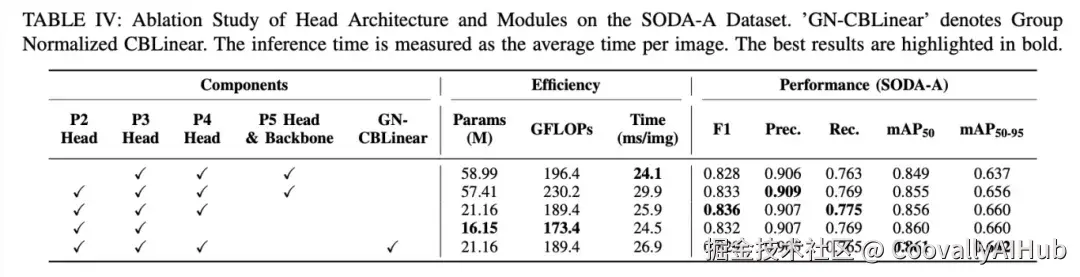
- 对于计算效率: 移除庞大的P5模块,参数量大幅下降(从约5900万减少到约2100万),计算量(GFLOPs)也得到优化。
- 对于特征质量: P4层足以提供全局语义信息,同时避免了P5层过大的感受野引入的无关背景干扰。
另一大创新:GN-CBLinear
YOLOv9引入了可编程梯度信息(PGI) 和辅助可逆分支来缓解深层网络的信息瓶颈。这个辅助分支通常使用简单的1x1卷积(CBLinear),以保持线性、避免信息损失。
然而,在训练高分辨率遥感图像时,由于GPU内存限制,常常只能使用极小的批量大小。在这种"微批量"情况下,标准的批量归一化(BN) 会因统计量估计不准而失效,导致训练不稳定。
LiM-YOLO提出了 GN-CBLinear模块,用组归一化(GN) 替换BN。GN不依赖批量大小,将通道分成组进行归一化,完美解决了微批量下的训练不稳定问题,确保了辅助分支能提供稳健的梯度流。
实验结果:精度与效率的双重胜利
论文在四个极具挑战性的数据集上进行了充分验证:
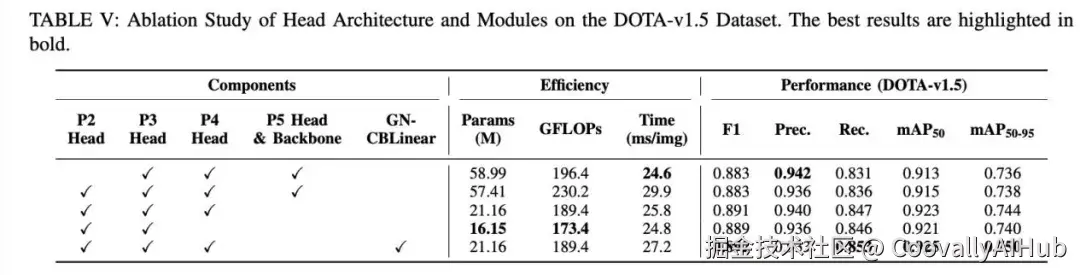
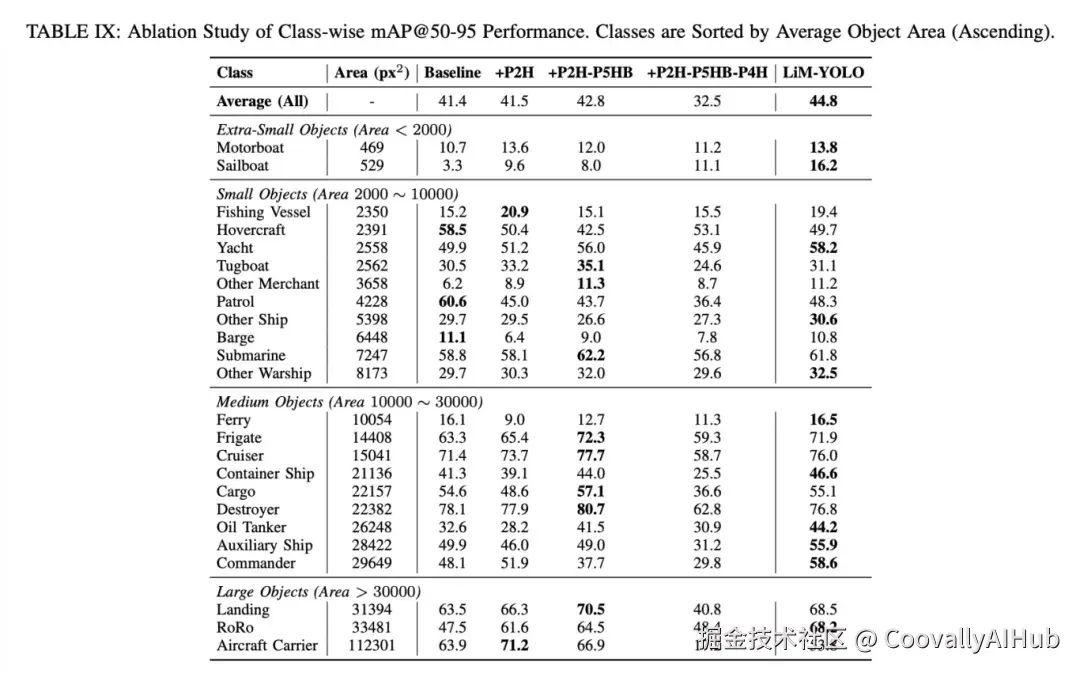
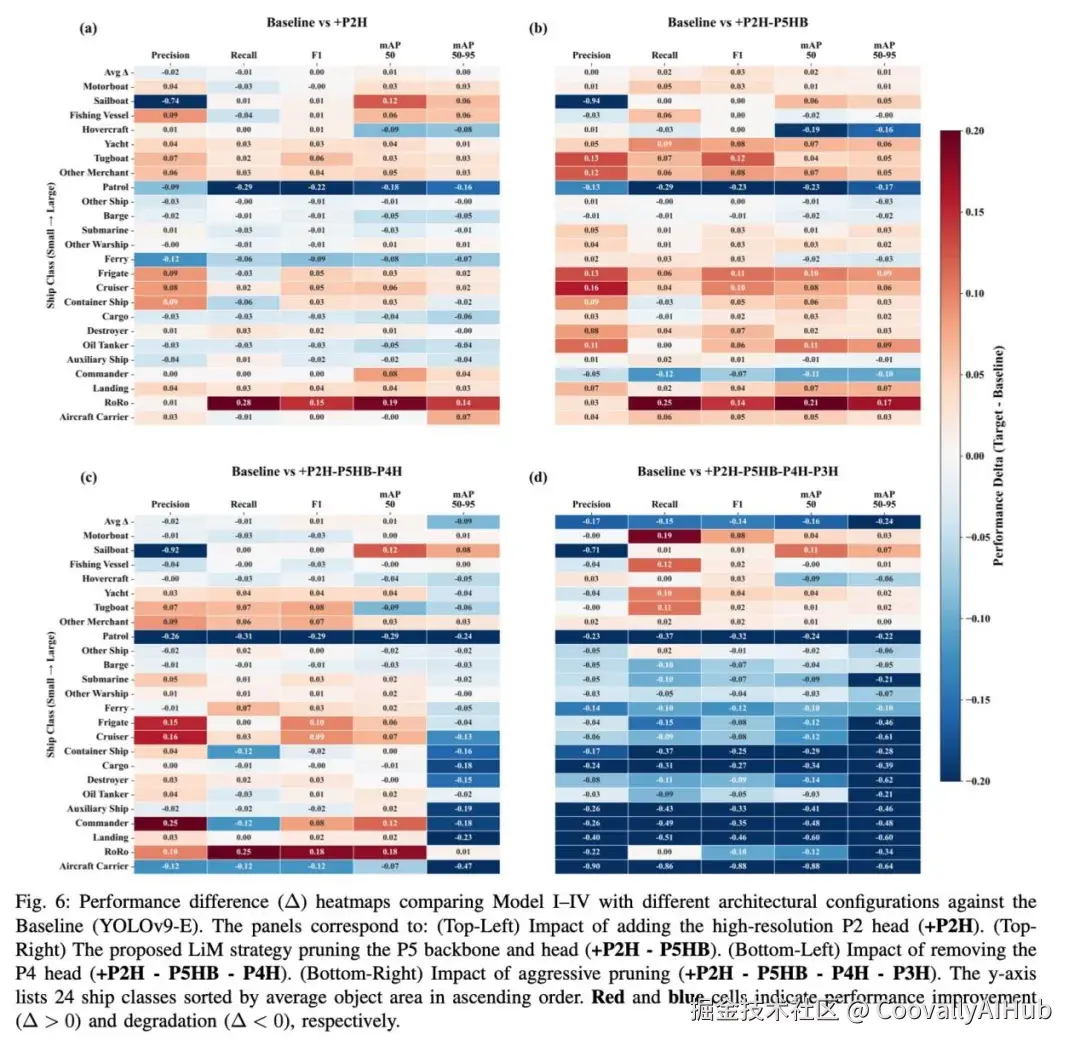
消融实验: 证明了"P2-P4"配置(同时加P2和减P5)远优于单纯"加P2"或"减P4"等策略,在各项指标上全面超越基线模型(YOLOv9-E)。
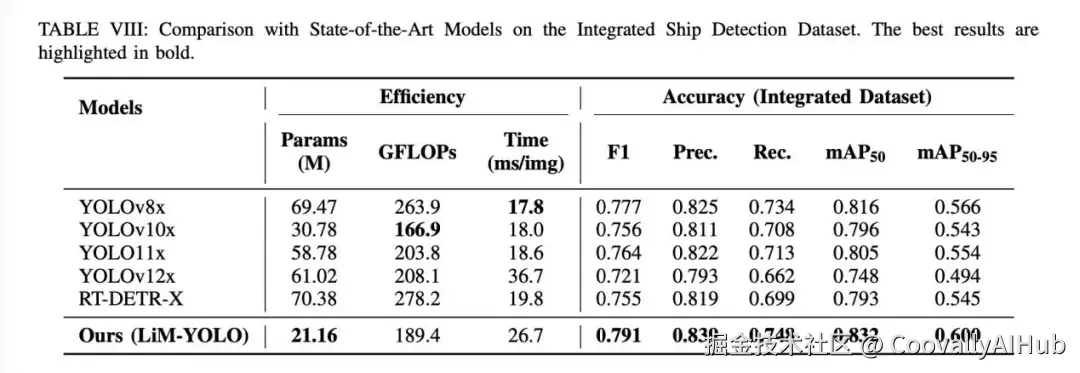
SOTA对比: 与YOLOv8x, YOLOv10x, YOLOv12x, RT-DETR-X等当前最先进模型相比,LiM-YOLO以最少的参数量(21.16M),取得了最高的综合检测精度(mAP50-95: 0.600),真正实现了"轻量化"与"高精度"的帕累托最优。
细粒度分类: 在包含24类船舶的ShipRSImageNet数据集上,LiM-YOLO对小尺度类别(如摩托艇、渔船)的检测提升尤为显著,同时保持了整体分类精度的领先。
Coovally平台上汇聚了400+开源数据集,不仅包含有关于船舶检测,还覆盖图像分类、目标检测、语义分割等主流任务场景。你找不到的数据,或许就在这里。一键调用即可投入训练,彻底告别四处搜寻、下载和格式化数据的繁琐。

- 一站式模型训练: 在平台上,你可以一键调用YOLO、Transformer等热门架构,快速进行模型训练与验证。平台的设计实现了极致的简化:
- 免环境配置: 直接调用预置的PyTorch、TensorFlow等深度学习框架。
- 免复杂调参: 内置自动化训练流程,即使初学者也能轻松上手,产出可用模型。
- 高性能算力支持: 底层提供分布式训练加速,大幅缩短实验周期。
- 无缝部署: 训练完成的模型可直接导出,或通过API快速接入您的业务系统。
>> 点击阅读原文,立即体验 Coovally <<
Coovally平台还可以直接查看"实验日志"。提供直观的可视化训练界面,清晰设置参数,监控训练过程(Loss, mAP等指标实时可视化)。
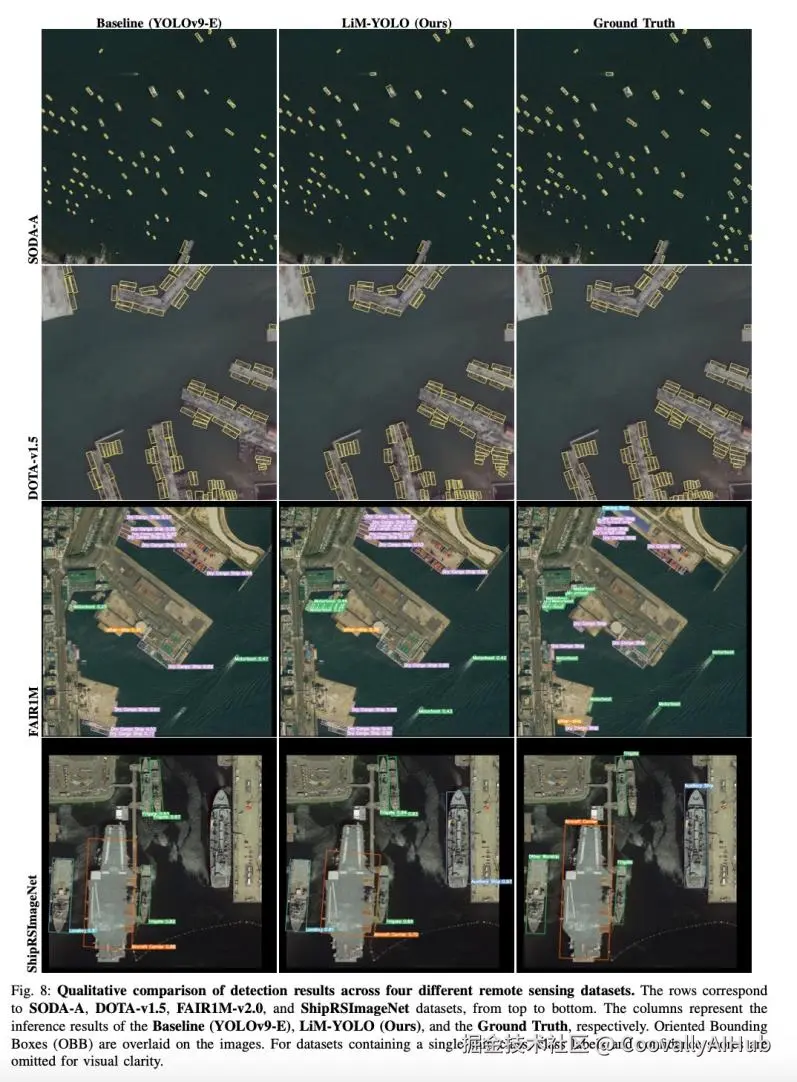
可视化效果: 定性结果显示,LiM-YOLO能够成功检测出基线模型漏检的密集、狭窄小型船舶,验证了其在空间细节保留上的优势。
总结与启示
LiM-YOLO的成功给了我们一个重要启示:在特定领域(如遥感)应用深度学习时,盲目追随通用架构或单纯增加模型深度/宽度并非最佳路径。通过对目标数据进行深入统计分析,进行"对症下药"式的结构重设计,往往能以更小的代价获得更大的性能提升。
这项研究为解决光学遥感图像中船舶检测的尺度与形态挑战提供了一个高效、实用的解决方案,为未来面向特定任务的神经网络架构优化多了一个参考与方向。