C语言实现快排
- 导读
- 一、算法原理
-
- [1.1 分治策略](#1.1 分治策略)
- [1.2 快排中的分治策略](#1.2 快排中的分治策略)
- 二、C语言实现
-
- [2.1 准备工作](#2.1 准备工作)
- [2.2 函数三要素](#2.2 函数三要素)
- [2.3 基准选择](#2.3 基准选择)
- [2.4 分区](#2.4 分区)
-
- [2.4.1 移动控制](#2.4.1 移动控制)
- [2.4.2 基准元素处理](#2.4.2 基准元素处理)
- [2.4.3 相同元素处理](#2.4.3 相同元素处理)
- [2.5 递归](#2.5 递归)
-
- [2.5.1 递归出口](#2.5.1 递归出口)
- [2.5.2 边界处理](#2.5.2 边界处理)
- [2.6 算法性能](#2.6 算法性能)
-
- [2.6.1 空间效率](#2.6.1 空间效率)
- [2.6.2 时间效率](#2.6.2 时间效率)
- [2.6.3 稳定性](#2.6.3 稳定性)
- [2.7 算法代码](#2.7 算法代码)
- 结语
导读
大家好,很高兴又和大家见面啦!!!
在上一篇内容中我们介绍了 快速排序 的 基本思想 以及 排序步骤,这里我们简单的回顾一下:
- 快速排序 是结合了 比较排序 和 分治策略 的一种高效的 递归排序算法
- 快速排序 的排序过程可以总结为三步:
- 基准选择 :选择一个用于进行分区的 基准元素
- 分区 :通过 左右指针 的 交替扫描 与 元素交换 ,将小于基准的元素调整至其左侧,大于基准的元素调整至其右侧
- 递归排序:将分区后的左右子序列作为新的待排序序列,重复上述过程,直至序列完全有序
了解了 快排 的 基本思想 以及 排序步骤 后,相信大家都会关心一个问题:
- 我们应该如何实现一个快速排序呢?
别着急,在今天的内容中,我们将会详细介绍 快排 的 C语言实现 以及 算法性能。下面就让我们进入今天的内容;
一、算法原理
快排 的 算法原理 是基于 分治策略,简单的说就是:
- 通过 双指针 将 关键字序列 进行 分区
- 每个分区所需要完成的任务与原序列的任务相同------实现 交换排序
- 通过 递归 对每个分区进行 快速排序 ,以达到从 局部有序 到 整体有序 的目的
可能有朋友并不太熟悉什么是 分治策略 这里我们简单的了解一下;
1.1 分治策略
分治策略 是一种非常重要的 算法设计思想 ,其 核心逻辑 可以概括为 分而治之:
- 将一个复杂的大问题分解成若干个规模较小、结构相似的子问题 ,然后分别解决这些子问题 ,最终将子问题的解合并起来得到原问题的解
也就是说 分治策略 包含 3 3 3 步 核心操作:
- 分解 :将原问题划分为若干个 规模较小 、相互独立 、且 与原问题形式相同 的子问题。
- 这里的 独立 是关键,它意味着子问题之间没有关联,可以分别求解,这为并行计算提供了可能
- 解决 :递归地求解 各个子问题。
- 如果子问题的规模已经足够小,可以直接求解时,则停止递归,直接进行求解。
- 合并 :将各个子问题的解合并 ,最终形成原问题的解。
- 有些算法的合并操作很简单(比如 快速排序 ),而有些则相对复杂(比如 归并排序)。
1.2 快排中的分治策略
在 快排 中,其 分治 的实现离不开 3 3 3 步操作:
- 双指针遍历 :通过 双指针 将 关键字序列 分为 两部分 :
- 左侧小元素分区 :基准元素左侧 的所有元素均 小于等于基准元素
- 右侧大元素分区 :基准元素右侧 的所有元素均 大于等于基准元素
- 交换排序 :通过 交换排序 的两步核心操作来 解决排序问题 :
- 比较 :通过 双指针 所指向的元素与 基准元素 的比较,确定 双指针 所指向的元素的 正确分区
- 交换 :通过 交换操作 将 双指针 所指向的元素放入 正确分区 中
- 递归 :通过 递归 的两步核心操作来完成整个 分治策略 :
- 递进 :通过 递进操作 实现 分治策略 中的 分而治之
- 回归 :通过 回归操作 实现 分治策略 中的 合并
因为 快排 是一种 原地排序算法 ,因此,其 合并操作 是一种 隐式合并:
- 没有明确直观的 分区合并 ,而是通过 分区边界恢复 实现的 合并
二、C语言实现
理解了 快排 的 算法原理 ,接下来我们就需要通过 C语言 逐步实现 快排;
2.1 准备工作
在实现 快速排序 之前,我们需要先创建好三个文件:
- 排序算法头文件
Quick_Sort.h------ 用于进行排序算法的声明 - 排序算法实现文件
Quick_Sort.c------ 用于实现排序算法 - 排序算法测试文件
text.c------ 用于测试排序算法
2.2 函数三要素
快排 的作用是用于对 目标序列 进行 递归交换排序 ,因此我们需要明确 目标对象 、对象大小 ,作为一种 原地排序算法,函数也无需任何返回值,因此我们就可以参考之前的算法定义:
c
// 交换排序------快速排序
void Quick_Sort(ElemType* nums, int len) {
}这时有朋友可能就会产生疑问:如果参数只有 nums, len 那我们应该如何确认分区呢?
如果你也有这种疑问,首先我要恭喜你,你现在已经意识到了 快排 的 核心 ------ 分区;
其次,我们需要知道 快排 的 适用范围 ------仅适用于顺序表;
最后,根据该 适用范围 我们就能够解释该定义下对 分区 的处理:
- 在 C语言 中,数组名 表示的是 数组首元素的地址 ,下标 表示的是 数组元素地址与数组首元素地址的差值 ,因此我们可以通过 数组 + 下标 的方式找到数组中以 下标 为 首元素 的 子数组 ,即 数组分区;
再简单一点说就是:
c
// 交换排序------快速排序
void QuickSort(ElemType* nums, int len) {
QuickSort(nums, i); // 下标 0 ~ i - 1 的分区
QuickSort(nums + i, len); // 下标 i ~ len - 1 的分区
}现在大家看到这个代码应该就能够明白如何通过这两个参数进行 递归分区;
当然,我们也可以选择更加直观、可读性更强的方式进行定义:
c
// 交换排序------快速排序
void QuickSort(ElemType* nums, int begin, int end) {
}这种定义方式就清楚的表明了 排序对象 、排序分区起点 、排序分区终点,这样我们就能一目了然,知道当前我们是在对哪一部分的分区进行排序操作;
具体如何选择,这个需要看个人的具体需求:
- 若想保证排序算法传参的一致性,则可以选择第一种
- 若想提高代码的可读性,则可以选择第二种
PS:下面我会采用第一种方式进行介绍,这也是为了后面对不同排序算法的对比分析更加方便;
2.3 基准选择
在 快排 中,我们需要做的第一件事就是------选择基准元素 ,这里我们选择以 首元素 作为基准元素,之后我们还需要记录当前的 基准元素:
c
ElemType key = nums[0]; // 记录基准元素2.4 分区
在 快排 中,我们是通过 双指针 实现的分区操作,因此我们需要先设置这两个指针,由于 快排 是用于 顺序表 的 原地排序算法 ,因此我们这里设置的 双指针 实际上就是 数组下标变量:
c
int left = 0, right = len - 1; // 设置双指针这里需要注意,参数 len 这里在不同的情况下,其含义也不同:
- 当我们传入的
len表示的是 分区元素总个数 时,那 右边界 对应的 数组下标 就是len - 1; - 当我们传入的
len表示的是 右边界 时,那么对应的 数组下标 就是len;
因为我这里的介绍要保持 排序函数接口的一致性 ,因此我这里的 len 表示的是 分区元素总个数;
整个分区的实现是通过 双指针 的 交替扫描 以及 比较 与 交换 操作实现,因此我们这里需要通过 循环 完成分区:
c
// 分区
while (left < right) {
// 右指针寻找小值
while (right > left && nums[right] > key) {
right -= 1;
}
// 左指针寻找大值
while (left < right && nums[left] <= key) {
left += 1;
}
// 交换元素
if (left < right) {
Swap(&nums[left], &nums[right]);
}
}
// 交换基准元素与当前指针指向元素
Swap(&nums[left], &nums[0]);2.4.1 移动控制
首先我们需要明确一件事:
- 交换操作 是发生 逆序 时才会执行
因此,双指针 的 交替查找 本质上就是在找 左右分区 中的 第一次逆序,因此才会出现下面的停止扫描现象:
- 当 右指针 扫描到 小于基准元素的元素 时,停止继续向左扫描
- 当 左指针 扫描到 大于基准元素的元素 时,停止继续向右扫描
这时在 扫描 的过程中就会出现一个问题:
- 当 左右指针 在 扫描 时,并未发现 逆序 ,指针就已经 相遇
当发生这种情况时,往往会导致出现 死循环 甚至是 数组越界 的问题,因此我们需要通过 左指针 小于 右指针 这个条件来 约束查找过程 ;
并且为了避免 重复交换 ,我们在 双指针 均完成 扫描 后,还需要保证 左指针 小于 右指针 这个前提,才能进行交换操作;
2.4.2 基准元素处理
在完成 扫描 后,此时 双指针 的相遇点一定是一个 关键字小于等于基准元素 的 元素 ,因此我们再执行一次 交换操作 ,就能够确保:
- 基准元素左侧所有元素均不大于基准元素,基准元素右侧均不小于基准元素
这里我们还需要注意的是 相同元素的处理 问题
2.4.3 相同元素处理
正常情况下我们都是采用的 左侧元素小于等于基准元素,右侧元素严格大于基准元素 的规则,将与 基准元素 相同的元素划分到 基准元素左侧分区 ;
当然,根据 快排 的具体实现方式的不同,我们还可以选择将 与基准元素相同的元素 划分到 基准元素右侧分区 。
这个问题我们在之后的内容中会继续详细介绍,这里我们就不再展开,我们现在只需要知道在本次的介绍中,我们采用的是第一种处理方式:
- 将与 基准元素 相同的元素划分到 基准元素左侧分区
2.5 递归
2.5.1 递归出口
由于 快排 是一种 递归排序算法 ,因此我们还需要按照 递归 的要求,设置一个 递归出口 ;
快排 的 递归出口 设置并不困难,我们只需要弄清其 递归 的目的即可:
- 递归 是为了对 元素个数大于1的分区 进行 排序 的操作
因此当此时 带查找 的分区中 不存在元素 或者 有且仅有一个元素 时,我们就无需继续 递归排序 。这样我们就得出了 递归出口:
- 分区内的元素个数满足 l e n ≤ 1 len \leq 1 len≤1
对应的代码如下:
c
// 递归出口
if (len <= 1) {
return;
}在设置好了递归出口后,我们还需要明确 递归边界 ,即 递归排序的具体分区;
2.5.2 边界处理
前面我们也说过,快排 是一个适用于 顺序表 的 原地排序算法 ,因此我们可以通过 数组名 来确定 左边界 即 分区的起点 ,通过 元素总个数 来确定 右边界 即 分区终点:
c
// 递归处理左侧分区
QuickSort(nums, left);
// 递归处理右侧分区
QuickSort(nums + left + 1, len - left - 1);我们知道 左侧分区 就是从 分区起点 到 基准元素 这个范围内的所有元素,而当我们完成了 分区 后,左指针 指向的区域正是 基准元素 ,因此 左侧分区 我们就可以通过 nums、left 来表示:
nums为 数组名 ,表示的是 数组的起始地址 ,因此代表 左侧分区 的 起点left为 基准元素 此时所在的区域下标,同时也代表着 左侧分区 的 元素总个数 ,因此它也代表了 左侧分区 的 终点
相比于 左侧分区 ,右侧分区 的确定要稍微难一点,在我们当前的演示中,右侧分区 的 起点 应该是 基准元素 的右侧第一个元素,即下标为 left + 1 处的元素;而 分区终点 则是从 left + 1 这个下标开始,到 len 结束的这个区间内的 元素总个数 ,因此我们可以通过 下标之间的差值 来求出这个总个数,即 len - left - 1,这样我们就得到了具体的 右侧分区:
nums + left + 1为 右侧分区 的 起始地址 ,因此也代表 右侧分区 的 起点len - left - 1为 右侧分区 的 元素总个数 ,因此也代表 右侧分区 的 终点
2.6 算法性能
此时我们就完成了 快排 的全部功能,接下来我们就需要分析一下该算法的具体 性能 ;
2.6.1 空间效率
快排 是一个 递归算法 ,因此每执行一次 递进 就需要在内存空间中开辟一块 函数栈帧 用于 算法执行 ,其 容量与递归的最大层数一致 。
根据 快排 的 算法特性:
- 左侧元素 < < < 基准元素 < < < 右侧元素
大家是否有一种 熟悉感 ?
没错,该特性正是与 BST 一致,也就是说我们可以将 快排 理解为通过 交换排序 构造 BST 的过程,当完成了所有元素的 排序操作 后,我们就得到了一棵 BST 。
因此,当我们构造的这个棵 BST 为一棵 平衡二叉树 时,那么对应的 树的深度 为 O ( log 2 N ) O(\log_2 N) O(log2N);当我们构造的这棵 BST极其不平衡 时,那么 BST 就会退化成一个 链表 ,对应的 树深 为 O ( N ) O(N) O(N);
而 递归的深度 与 BST 的深度一致,因此我们就得到了整个 递归 的 空间复杂度:
- 最好空间复杂度: O ( log 2 N ) O(\log_2N) O(log2N)
- 最坏空间复杂度: O ( N ) O(N) O(N)
2.6.2 时间效率
既然此时我们可以将 快排 的过程视为 构建BST 的过程,那么对应的 时间复杂度 实际上就是 BST 的 时间复杂度 ,即:
- 最好时间复杂度: O ( log 2 N ) O(\log_2 N) O(log2N)
- 平均时间复杂度: O ( log 2 N ) O(\log_2 N) O(log2N)
- 最坏时间复杂度: O ( N ) O(N) O(N)
但是 快排 又不是完全等同 BST ,对于 N N N 个元素的 关键字序列 ,我们总共需要执行 N N N 次 分区 ,即 每一次分区确定一个元素的位置 。因此 快排 的 时间复杂度 应该为:
- 最好时间复杂度: O ( N l o g 2 N ) O(Nlog_2N) O(Nlog2N)
- 平均时间复杂度: O ( N l o g 2 N ) O(Nlog_2N) O(Nlog2N)
- 最坏时间复杂度: O ( N 2 ) O(N^2) O(N2)
当从目前我们学习的 内部排序算法 来看,快排 的 平均性能 是 内部排序算法 最优的一种 原地排序算法;
2.6.3 稳定性
由于 快排 是通过 双指针 的 交替遍历 完成的 逻辑分区 ,对于 相同元素的处理,我们同样会根据具体情况执行不同的操作:
- 若规定 左侧分区小于等于基准元素 ,那么 遍历过程 中,右侧分区 中与 基准元素相等 的元素则会被 交换 到 左侧分区中
- 若规定 右侧分区大于等于基准元素 ,那么 遍历过程 中,左侧分区 中与 基准元素相等 的元素则会被 交换 到 右侧分区中
因此,不管如何规定,都会改变 相同元素的相对位置 ,这也就表明 快排是一种不稳定的排序算法;
2.7 算法代码
完整代码如下所示:
c
// 算法头文件
#pragma once
#include <stdio.h>
#include <stdlib.h>
#include <stdbool.h>
#include <assert.h>
#include <time.h>
#define N1 100000 // 大规模元素个数
#define N2 10 // 小规模元素个数
typedef int ElemType;
//交换操作
void Swap(ElemType* a, ElemType* b);
// 交换排序------快速排序
void QuickSort(ElemType* nums, int len);
// 交换排序------冒泡排序
void BubbleSort(ElemType* nums, int len);
// 插入排序------希尔排序
void ShellSort(ElemType* nums, int len);
// 插入排序------折半插入排序
void BInsertSort(ElemType* nums, int len);
// 插入排序------直接插入排序
void InsertSort(ElemType* a, int len);
// 数组打印
void Print(ElemType* arr, int len);
// 快速排序测试------随机数组测试
void test1();
// 快速排序测试------逆序数组测试
void test2();
// 算法实现文件
#include "Quick_Sort.h"
//交换操作
void Swap(ElemType* a, ElemType* b) {
ElemType c = *a;
*a = *b;
*b = c;
}
// 交换排序------快速排序
void QuickSort(ElemType* nums, int len) {
// 递归出口
if (len <= 1) {
return;
}
ElemType key = nums[0]; // 记录基准元素
int left = 0, right = len - 1; // 设置双指针
// 分区
while (left < right) {
// 右指针寻找小值
while (right > left && nums[right] > key) {
right -= 1;
}
// 左指针寻找大值
while (left < right && nums[left] <= key) {
left += 1;
}
// 交换元素
if (left < right) {
Swap(&nums[left], &nums[right]);
}
}
// 当跳出循环时,说明已经完成分区,此时交换基准元素与当前指针指向元素
Swap(&nums[left], &nums[0]);
// 递归处理左侧分区
QuickSort(nums, left);
// 递归处理右侧分区
QuickSort(nums + left + 1, len - left - 1);
}
// 交换排序------冒泡排序
void BubbleSort(ElemType* nums, int len) {
// 冒泡次数
for (int i = 1; i < len; i++) {
// 交换标志
bool flag = false;
// 一轮冒泡的比较次数
for (int j = 0; j <= len - i - 1; j++) {
// 判断元素是否逆序
if (nums[j] > nums[j + 1]) {
// 方法二:基于顺序表的交换操作
ElemType tmp = nums[j];
nums[j] = nums[j + 1];
nums[j + 1] = tmp;
flag = true;
}
}
if (flag == false) {
break;
}
}
}
// 插入排序------希尔排序
void ShellSort(ElemType* nums, int len) {
// 第一层划分
for (int d = len / 2; d >= 1; d /= 2) {
// 第二层划分
for (int i = 0; i < len - d; i++) {
ElemType key = nums[i + d]; // 记录待插入元素
// 查找与移动
int j = i; // 待插入元素下标
while (j >= 0 && nums[j] > key) {
nums[j + d] = nums[j];
j -= d;
}
// 插入
nums[j + d] = key;
}
}
}
// 插入排序------折半插入排序
void BInsertSort(ElemType* nums, int len) {
// 按左侧有序有边界进行划分
for (int i = 0; i < len - 1; i++) {
int key = nums[i + 1]; // 待排序对象
// 折半查找
int l = 0, r = i; // 折半查找的左右指针
while (l <= r) {
int m = (r - l) / 2 + l;
// 中间值 大于 目标值,目标值位于中间值左侧
if (nums[m] > key) {
r = m - 1; // 更新右边界
}
// 中间值 小于等于 目标值,目标值位于中间值右侧
else {
l = m + 1;
}
}
// 移动
for (int j = i; j >= l; j--) {
nums[j + 1] = nums[j];
}
// 插入
nums[l] = key;
}
}
//插入排序------直接插入排序
void InsertSort(ElemType* a, int len) {
//以左侧有序对象的起点作为分界线对排序对象进行划分
for (int i = 0; i < len - 1; i++) {
//记录需要排序的元素
ElemType key = a[i + 1];
//插入位置的查找
int j = i;//记录左侧有序元素的起点
//j < 0时表示查找完左侧所有元素
//a[j] <= key时表示找到了元素需要进行插入的位置
while (j >= 0 && a[j] > key) {
a[j + 1] = a[j];//元素向后移动
j -= 1;//移动查找指针
}
//插入元素
a[j + 1] = key;
}
}
// 数组打印
void Print(ElemType* arr, int len) {
printf("元素序列:");
for (int i = 0; i < len; i++) {
printf("%d\t", arr[i]);
}
printf("\n");
}
// 快速排序测试------随机数组测试
void test1() {
ElemType* arr1 = (ElemType*)calloc( N1, sizeof(ElemType));
assert(arr1);
ElemType* arr2 = (ElemType*)calloc(N1, sizeof(ElemType));
assert(arr2);
ElemType* arr3 = (ElemType*)calloc(N1, sizeof(ElemType));
assert(arr3);
ElemType* arr4 = (ElemType*)calloc(N1, sizeof(ElemType));
assert(arr4);
ElemType* arr5 = (ElemType*)calloc(N1, sizeof(ElemType));
assert(arr5);
ElemType* arr6 = (ElemType*)calloc(N2, sizeof(ElemType));
assert(arr6);
// 设置伪随机数
srand((unsigned)time(NULL));
// 生成10w个随机数
for (int i = 0; i < N1; i++) {
arr1[i] = rand() % N1;
arr2[i] = arr1[i];
arr3[i] = arr1[i];
arr4[i] = arr1[i];
arr5[i] = arr1[i];
if (i < N2) {
arr6[i] = rand() % (N2 * 10);
}
}
// 算法健壮性测试
printf("\n排序前:");
Print(arr6, N2);
QuickSort(arr6, N2);
printf("\n排序后:");
Print(arr6, N2);
printf("\n随机数组测试\n");
// 算法效率测试
int begin1 = clock();
InsertSort(arr1, N1);
int end1 = clock();
double time_used1 = ((double)(end1 - begin1)) / CLOCKS_PER_SEC;
printf("\n直接插入排序总耗时:%lf 秒\n", time_used1);
int begin2 = clock();
BInsertSort(arr2, N1);
int end2 = clock();
double time_used2 = ((double)(end2 - begin2)) / CLOCKS_PER_SEC;
printf("\n折半插入排序总耗时:%lf 秒\n", time_used2);
int begin3 = clock();
ShellSort(arr3, N1);
int end3 = clock();
double time_used3 = ((double)(end3 - begin3)) / CLOCKS_PER_SEC;
printf("\n 希尔排序总耗时:%lf 秒\n", time_used3);
int begin4 = clock();
BubbleSort(arr4, N1);
int end4 = clock();
double time_used4 = ((double)(end4 - begin4)) / CLOCKS_PER_SEC;
printf("\n 冒泡排序总耗时:%lf 秒\n", time_used4);
int begin5 = clock();
QuickSort(arr5, N1);
int end5 = clock();
double time_used5 = ((double)(end5 - begin5)) / CLOCKS_PER_SEC;
printf("\n 快速排序总耗时:%lf 秒\n", time_used5);
free(arr1);
arr1 = NULL;
free(arr2);
arr2 = NULL;
free(arr3);
arr3 = NULL;
free(arr4);
arr4 = NULL;
free(arr5);
arr5 = NULL;
free(arr6);
arr6 = NULL;
}
// 快速排序测试------逆序数组测试
void test2() {
ElemType* arr1 = (ElemType*)calloc(N1, sizeof(ElemType));
assert(arr1);
ElemType* arr2 = (ElemType*)calloc(N1, sizeof(ElemType));
assert(arr2);
ElemType* arr3 = (ElemType*)calloc(N1, sizeof(ElemType));
assert(arr3);
ElemType* arr4 = (ElemType*)calloc(N1, sizeof(ElemType));
assert(arr4);
ElemType* arr5 = (ElemType*)calloc(N1, sizeof(ElemType));
assert(arr5);
ElemType* arr6 = (ElemType*)calloc(N2, sizeof(ElemType));
assert(arr6);
// 生成10w个降序排列数
for (int i = 0; i < N1; i++) {
arr1[i] = N1 - i;
arr2[i] = arr1[i];
arr3[i] = arr1[i];
arr4[i] = arr1[i];
arr5[i] = arr1[i];
if (i < N2) {
arr6[i] = N2 - i;
}
}
// 算法健壮性测试
printf("\n排序前:");
Print(arr6, N2);
QuickSort(arr6, N2);
printf("\n排序后:");
Print(arr6, N2);
printf("\n逆序数组测试\n");
// 算法效率测试
int begin1 = clock();
InsertSort(arr1, N1);
int end1 = clock();
double time_used1 = ((double)(end1 - begin1)) / CLOCKS_PER_SEC;
printf("\n直接插入排序总耗时:%lf 秒\n", time_used1);
int begin2 = clock();
BInsertSort(arr2, N1);
int end2 = clock();
double time_used2 = ((double)(end2 - begin2)) / CLOCKS_PER_SEC;
printf("\n折半插入排序总耗时:%lf 秒\n", time_used2);
int begin3 = clock();
ShellSort(arr3, N1);
int end3 = clock();
double time_used3 = ((double)(end3 - begin3)) / CLOCKS_PER_SEC;
printf("\n 希尔排序总耗时:%lf 秒\n", time_used3);
int begin4 = clock();
BubbleSort(arr4, N1);
int end4 = clock();
double time_used4 = ((double)(end4 - begin4)) / CLOCKS_PER_SEC;
printf("\n 冒泡排序总耗时:%lf 秒\n", time_used4);
int begin5 = clock();
QuickSort(arr5, N1);
int end5 = clock();
double time_used5 = ((double)(end5 - begin5)) / CLOCKS_PER_SEC;
printf("\n 快速排序总耗时:%lf 秒\n", time_used5);
free(arr1);
arr1 = NULL;
free(arr2);
arr2 = NULL;
free(arr3);
arr3 = NULL;
free(arr4);
arr4 = NULL;
free(arr5);
arr5 = NULL;
free(arr5);
arr5 = NULL;
free(arr6);
arr6 = NULL;
}
// 算法测试文件
#include "Quick_Sort.h"
int main() {
test1();
test2();
return 0;
}下面我们一起来看一下测试结果:
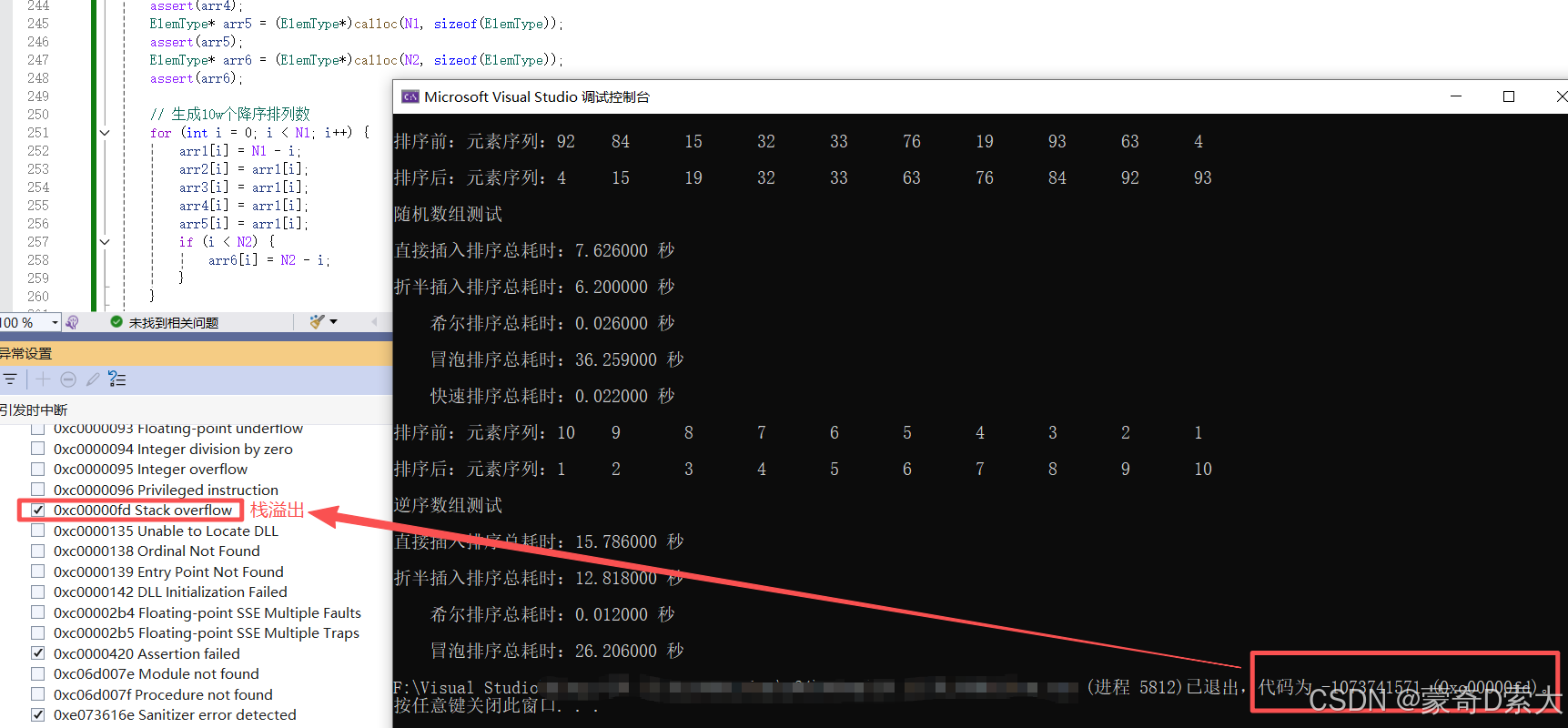
从这次测试结果中我们可以得到两个结论:
- 一般情况下,快速排序 要优于其他 排序算法
- 当原序列为 大规模 的 逆序序列 时,快排 会出现 栈溢出 的问题
显然 栈溢出 是目前 快排 的一个急需处理的问题,那么是什么原因导致的 栈溢出 呢?
这个问题的答案并不复杂,在前面我们也说过,快排 就像是一个 构建BST 的过程,因此在 最坏情况 下,快排 所构建的这棵 BST 是一个 长度 为 N N N 的 链表 。
这也就表示当前的递归的 递归深度 也为 N N N ,因此在大规模的情况下,就导致了 栈溢出 ;
那我们应该如何避免这个问题的出现呢?
其核心思路与 BST 的优化思路一致 ------ 使树尽量平衡,以此降低树的深度 。其具体方式有 随机数法 、三数取中法 、 ⋯ \cdots ⋯
其具体的优化方式我们将会在后续内容中揭晓,大家记得关注哦!
结语
在本文中,我们完成了 快速排序从理论到实践的完整跨越 ------不仅用C语言 实现了其 经典逻辑 ,还深入分析了其性能表现 与潜在缺陷 。
可以看出,快排 之所以高效,核心在于其 分治思想 与 原地交换 的巧妙结合,使其在平均情况下达到 O ( N log 2 N ) O(N\log_2 N) O(Nlog2N) 的 时间复杂度,表现优异。
然而,我们的测试也暴露了一个关键问题:
- 当输入 序列已基本有序或完全逆序 时,基础版本的 快排 会退化为 O ( N 2 ) O(N^2) O(N2) ,递归深度急剧增加 ,甚至导致栈溢出。
这提醒我们,基准元素的选择 是 快排性能的决定性因素之一 ,而简单选取首元素作为基准的策略在真实场景中并不可靠。
那么,如何让快排变得更稳健、更高效?
这正是我们下一篇要探讨的核心------快排的优化策略 。
在下一篇内容中,我们将聚焦于 快速排序的优化策略。我们将探讨:
- 如何通过 更智能的基准选择方法(如随机数法和三数取中法)来避免最坏情况的发生
- 如何通过 结合插入排序 来处理小规模子数组以减少递归开销。
这些优化将共同作用,使 快速排序 从一个 理论高效 的算法,蜕变为一个在实践中同样稳定、强健的排序工具。
互动与分享
-
点赞👍 - 您的认可是我持续创作的最大动力
-
收藏⭐ - 方便随时回顾这些重要的基础概念
-
转发↗️ - 分享给更多可能需要的朋友
-
评论💬 - 欢迎留下您的宝贵意见或想讨论的话题
感谢您的耐心阅读! 关注博主,不错过更多技术干货。我们下一篇再见!