目录

1.摘要
本文提出了一种混合文化--粒子群算法(C-PSO),融合文化算法与粒子群优化的优势,以平衡全局探索与局部开发并避免陷入局部最优。算法基于改进 Metropolis 规则,采用概率机制更新惯性权重。针对工业仓库中多 AGV 实时安全运行的需求,C-PSO 通过双层框架实现任务分配、容错与避碰路径规划。
2.文化粒子群算法CPSO
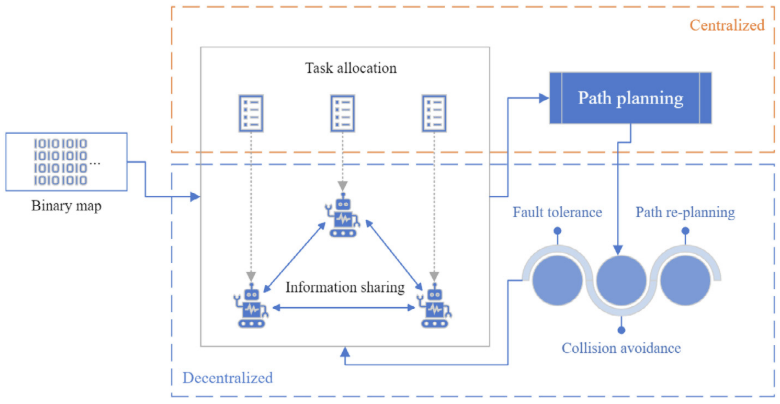
C-PSO 采用集中式--分布式双层结构,集中层负责地图构建与任务分配,通过评估各 AGV 的路径成本与任务成本,将任务分配给当前成本最小的可用 AGV。分布式层在时间窗内实现 信息共享、路径重规划、避碰与容错:AGV 按既定路径运行并实时交换位置与状态信息,一旦发生潜在碰撞或车辆故障,系统即可触发路径重规划与容错机制,保障运行安全与连续性。
C-PSO
文化粒子群算法(C-PSO)利用 CA 的特性,通过概率机制自适应更新惯性权重,在保证快速收敛的同时实现全局探索与局部开发的平衡。
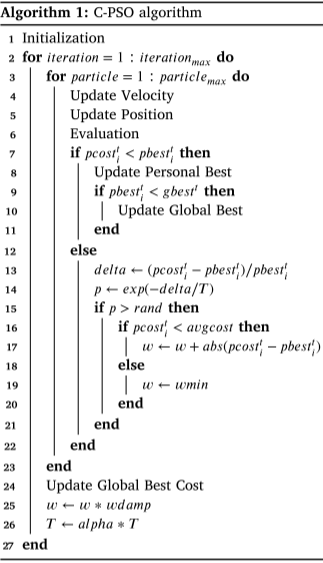
算法通过概率机制比较个体最优平均代价与当前粒子代价,并与随机数判断是否更新惯性权重;当个体最优平均代价高于当前解时,增强调节以促进全局搜索,从而避免陷入局部最优。
δ = f o b j ( i t ) − f b e s t ( i t ) f b e s t ( i t ) \delta=\frac{f_{obj}(i_t)-f_{best}(i_t)}{f_{best}(i_t)} δ=fbest(it)fobj(it)−fbest(it)
ρ = e − δ T \rho=e^{-\frac{\delta}{T}} ρ=e−Tδ
任务分配与路径规划

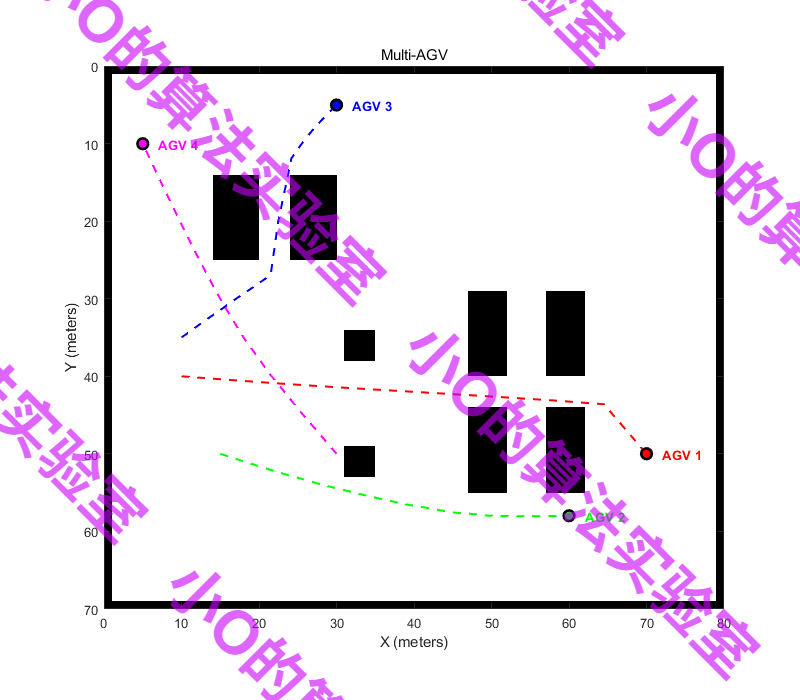
多 AGV 路径规划在二维栅格环境中进行,目标是在避开障碍物与相互碰撞的前提下最小化路径长度,碰撞解直接舍弃。路径代价由路径长度与碰撞惩罚共同构成,用于评估近似全局最优路径。任务分配在此基础上综合考虑路径代价、任务优先级及前序任务完成时间,其中路径代价权重最高。系统通过状态表与任务表动态管理 AGV 可用性与任务信息,实现安全、高效的多 AGV 协同调度。
3.结果展示
4.参考文献
1 Lin S, Liu A, Wang J, et al. An improved fault-tolerant cultural-PSO with probability for multi-AGV path planningJ. Expert Systems with Applications, 2024, 237: 121510.
5.代码获取
xx
6.算法辅导·应用定制·读者交流
xx