过去一年,边缘计算领域发生了天翻地覆的变化。
随着树莓派5等高性能紧凑型系统在AI加速领域实现显著突破,视觉应用的主要瓶颈已逐渐从原始算力转向系统级协同。如今,系统架构师面临的核心挑战在于:如何让传感器与I/O(输入/输出)基础设施充分释放这些处理器的潜力。
无论是设计自主移动机器人(AMR)、智能零售终端 ,还是部署多摄像头监控系统,成功的关键都在于将系统的"眼睛"------摄像头及其他传感器------与"大脑"即边缘AI硬件进行高效匹配。构建能够在2026年真正实现高效运行且成本优化的系统,正取决于对此关键对接的深入理解与妥善规划。
边缘人工智能计算的现状
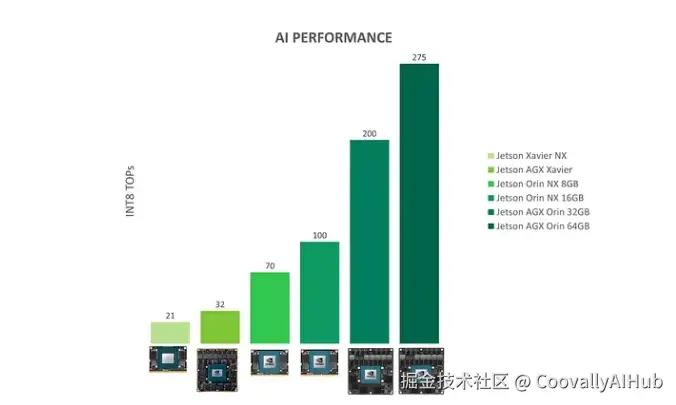
各大硬件厂商正传递出一个明确的信号:边缘AI的计算能力已经实现了一次重要飞跃。以NVIDIA新一代Jetson Thor为例,其在FP4精度下能够实现约2070 TFLOPS的AI算力,这意味着千万亿次级别的浮点运算性能如今已真正落地于边缘侧设备。与此前一代Jetson Orin相比,其性能增幅高达7.5倍,标志着边缘AI处理能力迈入了全新的阶段。
即使是入门级平台也有了显著提升。例如,树莓派5搭配Hailo-8L AI加速套件(通过M.2 PCIe模块),可获得13 TOPS的神经网络推理能力。Jetson Orin Nano的性能也从最初版本的40 TOPS提升至Super配置的67 TOPS,内存带宽也从68 GB/s跃升至102 GB/s。
对于需要高分辨率视频处理的专业应用,瑞芯微RK3588芯片可提供30fps的8K视频编码和60fps的解码,并配备6 TOPS的NPU(神经处理单元)以及强大的多摄像头支持。这些特性使其在网络视频录像机(NVR)和智能监控应用领域极具吸引力。
为什么视觉I/O策略比以往任何时候都更重要?
随着边缘计算性能的持续跃升,瓶颈方向已发生明显转移------即便拥有再强大的算力,也难以弥补因图像质量不佳、运动模糊、带宽受限或相机接口配置不当所带来的性能损失。
从镜头、传感器到接口传输,整个光学流水线的品质与配置,直接决定了AI模型能否充分发挥其效能。这里存在一个根本性挑战:如果AI模型是基于清晰、曝光准确的图像进行训练,而实际输入的却是模糊、昏暗或畸变的数据,其效果必将大打折扣。 因此,在边缘AI系统的构建中,选择合适的摄像头及其集成方案,已变得与选择处理器同等重要。
了解摄像头接口技术
现代边缘AI平台提供多种摄像头接口选项,每种都有其独特特性,会影响传输距离、带宽、稳定性和复杂性。对于大多数项目而言,MIPI CSI-2、GMSL 和USB 3.0是关键选择。了解每种接口的优势,有助于你为边缘设备和应用选配合适的摄像头。
- MIPI CSI-2:高速板载标准
MIPI摄像头串行接口2(CSI-2) 是片上系统(SoC)中主流的板载摄像头接口。它支持单通道最高约2.5 Gbps,四通道总速率约10 Gbps,足以满足高分辨率、高帧率视频传输,同时保持低功耗和极低延迟。因此,CSI-2非常适合直接安装在主板上或距离很近的摄像头,可通过短而灵活的扁平电缆保持信号完整性。
CSI-2的主要限制在于传输距离。它通常用于板级连接,距离一般在30厘米以内,这限制了摄像头相对于处理器的物理位置。例如,树莓派5提供两个CSI摄像头端口,专为短距离柔性电缆设计。NVIDIA Jetson Orin Nano开发套件也提供两个MIPI CSI-2接口,每对通道速率高达2.5 Gbps,适用于载板上的传感器直接连接。当摄像头靠近计算模块,且需要最高性能和最低延迟时,CSI-2通常是首选。
- GMSL:远距离同步多摄像头
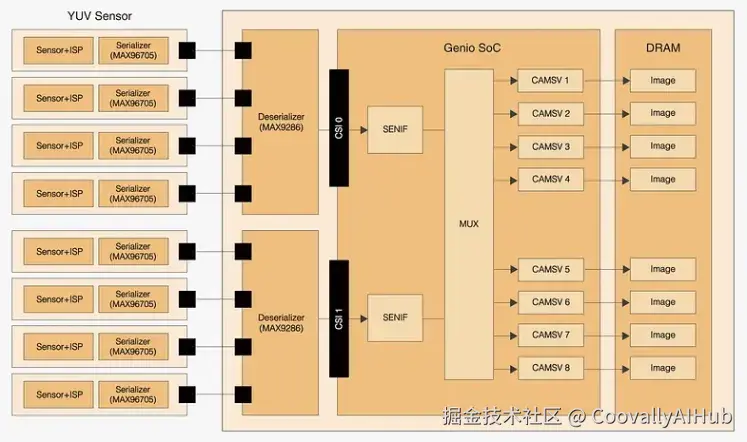
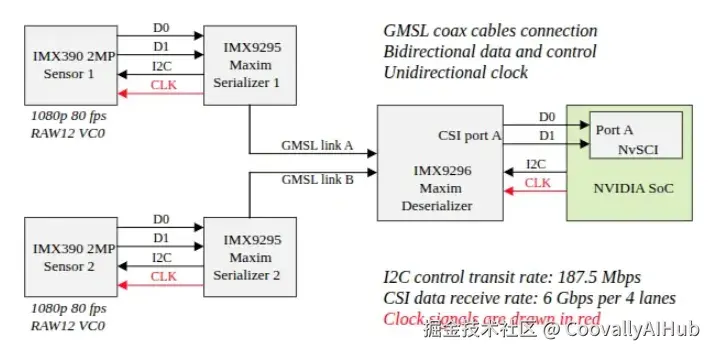
千兆多媒体串行链路(GMSL) 为特定场景下的摄像头系统集成提供了关键解决方案。它尤其适用于处理器与摄像头间必须保持较远物理距离,或需要在恶劣环境中实现多摄像头高精度同步的设计。这项技术最初源于汽车领域,为满足高级驾驶辅助系统(ADAS)及环视影像的严苛要求而开发。其核心在于采用串行器/解串器(SerDes)技术,仅通过单根同轴电缆或屏蔽双绞线,就能同时完成高速视频数据、控制信号与电力的长距离、可靠传输。如今,GMSL的应用已广泛拓展至机器人、工业自动化、智能交通等各类边缘AI前沿领域。
技术规格方面,GMSL技术持续迭代。GMSL2的链路速率可达6 Gbps,视频有效载荷约5.2 Gbps,在维持约15米线缆长度时仍能实现微秒级低延迟。其下一代GMSL3将前向链路带宽提升至12 Gbps,足以支持通过单根线缆传输90 fps的未压缩4K视频流,或并行传输多路4K图像。在工作流程上,摄像头端的串行器将图像传感器输出的MIPI CSI信号转换为GMSL信号进行传输;在处理器端,解串器则将其还原为标准CSI-2信号,以便SoC进行接收处理。
GMSL带来了一系列重要的实际优势。其中,同轴供电(PoC)技术允许通过同一根电缆传输数据的同时提供电力(通常为12V),这极大简化了多摄像头系统的布线复杂度。此外,GMSL设备内置的帧同步功能,能确保多个摄像头在精确的同一时刻捕获图像,这对立体视觉、3D重建与全景感知等应用至关重要。以NVIDIA Jetson平台为例,通过适配板卡,可在Orin Nano上支持四个或更多GMSL摄像头,而在AGX Orin或Xavier平台上,则可支持多达八个乃至十六个摄像头。
当然,采用GMSL方案也意味着需要权衡其引入的复杂性与成本。系统需增加专用的串行器/解串器芯片、进行精心的PCB与线缆设计,并在Jetson等平台上配置相应的驱动程序与设备树。其功耗通常高于板载MIPI直连方案,且不如USB接口那样具备即插即用的便利性。
然而,当应用场景明确要求多摄像头精密同步、长距离可靠传输以及满足汽车级电磁干扰(EMI)抗扰标准时------例如在移动机器人或车辆平台上------GMSL往往成为唯一实用的选择。它能够为边缘AI系统提供清晰、稳定且具有确定性的视频流,从而确保顶层智能算法的效能得以充分发挥。
- USB 3.0:灵活、主机友好的视频
USB 3.0则处于另一个极端:它极其灵活、支持广泛且易于集成,但其确定性不如MIPI或GMSL。标称链路速度为5 Gbps(约640 MB/s),但考虑到协议开销和主机限制,实际吞吐量通常接近每个主机控制器1.5--1.9 Gbps。一台未压缩的1080p 30fps摄像头大约消耗400 Mbps带宽,因此理论上多台高清摄像头可以共享一个USB 3.0控制器,但争用和集线器设计会严重影响实际性能。
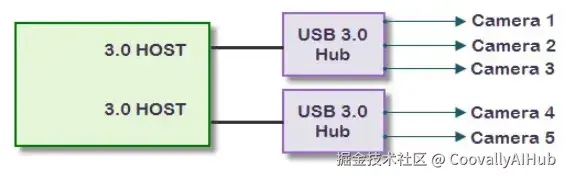
使用合适的线缆和集线器,USB摄像头可以放置在距离主机数米远的地方,因此非常适合自助服务终端、固定安装和概念验证原型。然而,所有通过同一集线器连接的摄像头共享同一上行链路,带宽由主机控制器动态管理,如果测试不当,可能会导致丢帧或帧率降低。与GMSL不同,USB本身不提供微秒级的帧同步精度;需要外部GPIO触发器或专用同步盒才能实现精确的多摄像头同步。
关键传感器技术:全局快门 vs. 卷帘快门
这种权衡体现在成本和分辨率上。全局快门传感器通常比同等性能的卷帘快门传感器更昂贵,像素数量也可能更低。然而,对于运动持续不断的应用,如送货机器人、无人机、自动驾驶汽车和机械臂,投资全局快门技术是必不可少的,而非可有可无。
在机器人及高速视觉系统的设计中,快门技术的选择是一项影响深远的决策,它直接决定了系统在动态场景下的成像质量与可用性。
卷帘快门传感器采用逐行顺序曝光与读取的工作方式。这一机制虽然有助于实现更高的像素密度和更低的制造成本,但在拍摄高速运动物体或相机自身处于运动状态时,会引入明显的"果冻效应"畸变。对于机器人应用,特别是在依赖视觉的导航与即时定位与地图构建(SLAM)等任务中,此类图像失真会严重影响空间感知的准确性,导致其难以用于精确的环境理解与决策。
相比之下,全局快门传感器通过同步曝光所有像素,在同一时刻捕捉完整的画面,从而彻底避免了因物体或相机运动导致的形变。这种时间与空间的高度一致性,为高速、高精度的视觉应用提供了关键保障。因此,在动态环境中,全局快门所提供的图像不仅是清晰的,更是"真实"且可用于精密计算的。

当然,这一优势伴随着相应的权衡。全局快门传感器通常在成本上高于同等性能的卷帘快门传感器,且在像素总量上可能受到一定限制。然而,对于运动持续不断、对图像完整性要求严苛的应用场景------例如自主移动的送货机器人、高速无人机、自动驾驶车辆以及精准操作的机械臂------采用全局快门已非一项可选的优化,而是保障系统可靠性与性能的必备条件。在此类场景中,投资于全局快门技术,实质上是为整个视觉系统的鲁棒性与有效性奠定基础。
常见应用场景的平台特定考量
- 自主移动机器人(AMR)
AMR应用推动了NVIDIA Jetson Orin系列在机器人领域的广泛采用。这些平台需要处理传感器融合数据、执行实时SLAM,并以最小延迟做出导航决策。
对于导航和避障,通过MIPI CSI接口连接的全局快门摄像头可提供最佳的图像质量和低延迟组合。Jetson Orin模块上的两个CSI端口可分配给配备全局快门传感器的前置导航摄像头,以确保路径规划所需的数据清晰无失真。
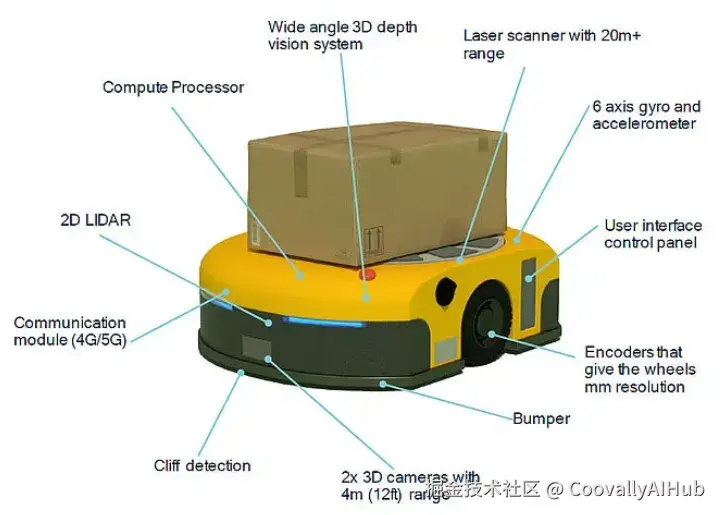
对于后视监控、远程呈现或环境感知等机器人或目标相对静止的辅助功能,USB 3.0摄像头可以处理这些数据流,而不会占用宝贵的CSI带宽。这种架构方案既能为关键任务传感器保留高带宽、低延迟的接口,又能利用更灵活的USB连接传输补充数据。
- 智能零售亭和自动售货机
现代零售自助服务终端已发展成为多摄像头系统,通常需要三到四个或更多成像设备。典型需求包括:用于支付或年龄验证的人脸识别、条形码/二维码扫描、库存监控和安全监控。
搭载Hailo-8L AI加速套件的树莓派5已成为这些应用的理想平台,以亲民的价格提供13 TOPS的AI加速性能。然而,由于仅提供两个CSI摄像头接口,系统设计人员必须规划混合摄像头架构。
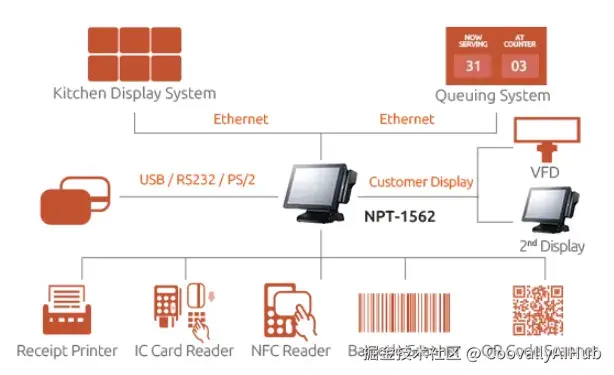
对延迟最敏感的摄像头(通常是用于支付授权的人脸识别摄像头)应通过CSI接口连接,以最大程度减少用户体验中的延迟。用于库存监控、安防或其他辅助功能的摄像头可以通过USB 3.0接口连接。现代自助服务终端通常需要500万至800万像素或更高的分辨率,才能清晰地识别人脸特征并准确读取条形码。
在原型设计阶段测试USB带宽分配至关重要。如果自助服务终端设计需要四个摄像头,其中三个必须使用USB接口,请计算总带宽需求(分辨率 × 帧速率 × 位深度),并验证其是否在USB控制器的实际带宽限制范围内。
- 多摄像头网络录像机和监控系统
对于网络视频录像机(NVR)和智能监控应用,瑞芯微RK3588提供了强大的功能。它支持30fps的8K编码,并具备处理多通道编码和解码的能力,非常适合专业视频管理。

RK3588拥有丰富的摄像头接口支持,包括两个MIPI DC(4通道DPHY)接口、四个2通道MIPI CSI接口和一个DVP接口。这种灵活性使其能够同时直接连接多个高分辨率摄像头。对于需要"环视"覆盖或多角度监控的应用,RK3588的架构可以容纳四个或更多摄像头视频流,而无需完全依赖USB连接。
专业NVR系统通常支持8到64个通道或更多,带宽需求高达数百Mbps。RK3588能够以30fps编码8K视频,或同时处理多达32个通道的1080p30编码,使其能够胜任高容量监控部署。
实用设计指南
在规划边缘视觉系统时,遵循以下原则有助于使你的传感器策略与计算平台保持一致。
- 根据优先级和性能要求分配接口
- 对于需要最高带宽、最低延迟或用于时间关键型AI推理(如导航、安全、主要识别任务)的摄像头,保留MIPI CSI连接。
- 对于延迟可接受的辅助摄像头,或摄像头位置需要较长线缆的情况,使用USB 3.0。
- 当摄像头必须放置在数米之外、多摄像头帧同步至关重要,或系统在电磁环境恶劣的环境中运行时,考虑使用GMSL。
- 将传感器技术与运动特性相匹配
- 如果应用场景涉及快速移动的物体或移动的相机平台,全局快门传感器是必需品,而非奢侈品。
- 对于静态或慢速移动的场景,卷帘快门传感器能提供更高的分辨率和更低的成本。
- 尽早计算并测试带宽
- 不要等到集成阶段才发现带宽瓶颈。计算所有摄像头的总数据吞吐量(分辨率 × 帧速率 × 像素格式)。
- 对于USB配置,由于主机控制器性能各异,务必使用实际硬件和真实流媒体模式进行测试。
- 对于GMSL系统,验证解串器通道分配和任何带宽共享要求。
- 将镜头质量和光学元件纳入系统考量
- 即使是最好的传感器和最强大的处理器,也无法弥补镜头质量差、焦距不合适或光照不足带来的问题。
- 在投资计算设备和传感器的同时,也要为优质光学元件和合适的曝光控制预留预算。
面向边缘AI视觉的平衡系统设计
边缘AI计算能力的飞速提升------从NVIDIA Jetson Thor的petaFLOP级性能,到树莓派5的13 TOPS AI加速------从根本上改变了边缘计算的可能性。但这种强大的处理能力,只有与精心设计的视觉流水线相结合,才能真正发挥作用。
成功的边缘视觉系统需要在传感器技术 (全局快门 vs. 卷帘快门)、接口选择 (MIPI CSI、GMSL、USB)、带宽管理、镜头质量 和照明设计等多个方面取得平衡。再强大的AI计算能力也无法修复模糊、昏暗或失真的图像。最佳的AI模型将基于精心设计的光学系统采集的清晰数据构建而成。
通过了解当今边缘AI硬件的实际能力和局限性,并将这些能力与你应用程序的具体需求相匹配,你就可以构建出能够充分利用当前边缘卓越计算资源的视觉系统。