目录
1.摘要
本文研究了考虑自动导引车(AGV)运输任务的集成工艺规划与调度问题(IPPS_T),在传统 IPPS 的基础上,IPPS_T 进一步将 AGV 运输任务分配纳入决策范围,使问题复杂度显著提升。为此,本文提出了一种集成编码方法,可在单一个体中同时表示工艺路线、车间调度方案和 AGV 任务分配。并设计了一种结合关键路径邻域搜索策略改进遗传算法(IGA),增强对机器与 AGV 的局部搜索能力。
2.问题描述
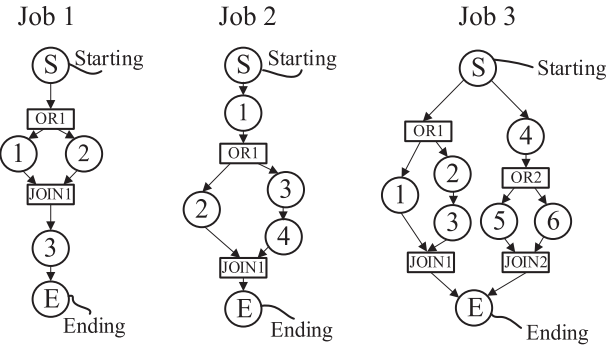
IPPS_T 问题是在传统集成工艺规划与调度基础上引入 AGV 运输决策,对多作业在多机器环境下的工艺路线、操作顺序、机器选择和运输任务进行统一优化,其目标是最小化最大完工时间。在满足工艺优先约束、机器与 AGV 资源独占及不可中断等条件下,该问题高度耦合、复杂复杂度高,属于典型的 NP-hard 集成优化问题。
3.改进关键路径搜索遗传算法
编解码方案
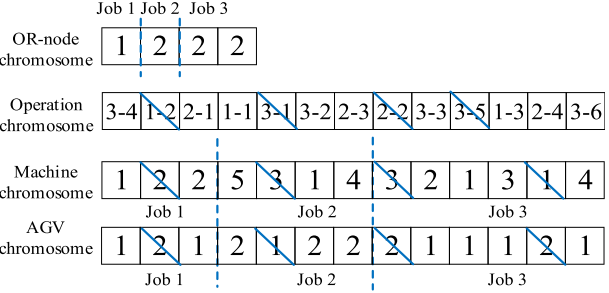
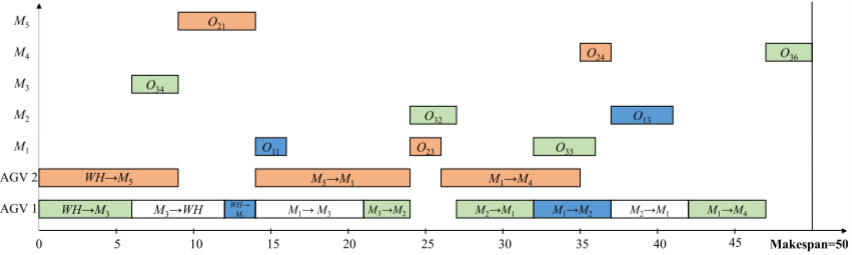
本文针对 IPPS_T 问题提出了一种四层集成编码方法,将工艺路线选择、工序排序、机器分配与 AGV 运输任务分配统一表示于同一个体中。通过引入 AGV 染色体并在解码前删除未选工序及其相关基因,实现了解空间与编码空间的完整映射。解码过程中采用半主动调度策略,综合考虑工序加工状态与 AGV 的位置和可用性,动态计算运输过程与加工时序,从而有效刻画真实车间中的加工与运输协同过程。
初始化和选择
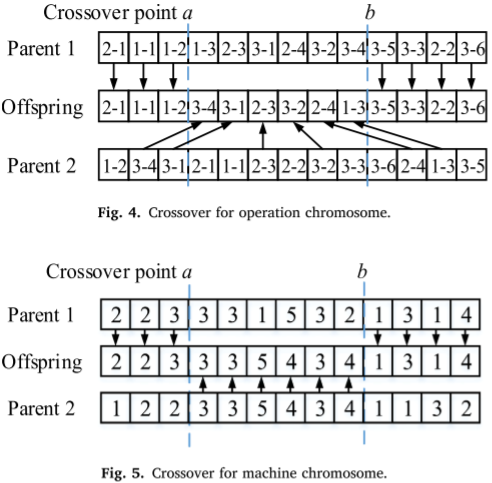
本文采用随机方式对各类染色体进行初始化,并通过锦标赛选择机制以一定概率保留适应度较优个体,从而兼顾进化压力与种群多样性。交叉操作中,工序染色体采用保持相对顺序的两点交叉策略,其余染色体基于基因位置对应关系进行两点交叉,以确保解的可行性并实现有效遗传重组。
基于关键路径搜索的变异算子
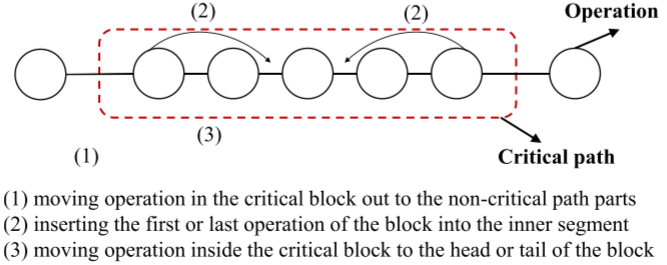
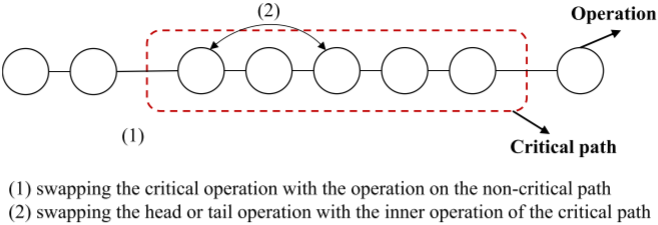
本文将关键路径方法扩展至同时包含机器加工与 AGV 运输任务的 IPPS_T 问题,基于扩展关键路径和关键块提出了改进的邻域搜索与变异策略。通过对关键路径上的操作与非关键操作进行交换,加强对 makespan 的有效扰动,并进一步针对 AGV 关键任务块设计了可行的交换变异方法。
4.参考文献
1 Liu Q, Wang C, Li X, et al. An improved genetic algorithm with modified critical path-based searching for integrated process planning and scheduling problem considering automated guided vehicle transportation taskJ. Journal of Manufacturing Systems, 2023, 70: 127-136.
5.代码获取
xx
6.算法辅导·应用定制·读者交流
xx