基于捷联惯导(SINS)与多普勒计程仪(DVL)组合导航的MATLAB算法实现方案
一、系统架构设计
1. 硬件组成
- 捷联惯导模块:三轴MEMS陀螺仪(零偏稳定性<0.1°/h)和加速度计(偏置稳定性<50μg)
- 多普勒计程仪:四波束Janus配置(测量精度±0.5% V)
- 主控单元:STM32H7+FPGA架构(实时数据处理)
2. 软件架构
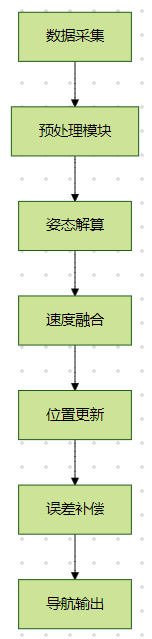
二、核心算法流程
1. 数据预处理
matlab
% 多普勒测速数据预处理(MATLAB示例)
function [v_clean] = preprocess_dvl(raw_v, fs)
% 巴特沃斯低通滤波(截止频率10Hz)
[b,a] = butter(4, 10/(fs/2));
v_filt = filter(b,a,raw_v);
% 基线漂移补偿
v_clean = v_filt - movmean(v_filt, 100);
end2. 捷联惯导解算
matlab
% 四元数姿态更新(四阶龙格-库塔法)
function q = update_attitude(gyro, dt)
q = [1; 0; 0; 0]; % 初始四元数
K1 = 0.5 * dt * gyro;
K2 = 0.5 * dt * (gyro + 0.5 * K1);
K3 = 0.5 * dt * (gyro + 0.5 * K2);
K4 = 0.5 * dt * (gyro + K3);
q = q + (K1 + 2*K2 + 2*K3 + K4)/6;
q = q / norm(q); % 归一化
end3. 组合导航滤波(UKF实现)
matlab
% 无迹卡尔曼滤波核心代码
function [x_est, P] = unscented_kalman_filter(x, P, z, R, Q)
% 状态维度
n = length(x);
% 生成Sigma点
[X, W] = generate_sigma_points(x, P);
% 传播过程
X_pred = zeros(size(X));
for i = 1:size(X,2)
X_pred(:,i) = propagate_state(X(:,i), dt);
end
% 更新过程
z_pred = measurement_model(X_pred);
Pzz = cov(z_pred) + R;
Pxz = cov(X_pred, z_pred);
% 卡尔曼增益
K = Pxz / Pzz;
% 状态更新
x_est = mean(X_pred) + K*(z - z_pred);
P = P - K*Pzz*K';
end
function [X, W] = generate_sigma_points(x, P)
n = length(x);
lambda = 3 - n;
X = zeros(n, 2*n+1);
X(:,1) = x;
P_sqrt = chol((n+lambda)*P);
for i = 1:n
X(:,i+1) = x + P_sqrt(:,i);
X(:,i+2) = x - P_sqrt(:,i);
end
W = [lambda/(n+lambda), 0.5/(n+lambda)*ones(1,2n)];
end三、关键算法实现
1. SINS/DVL数据融合
matlab
function [state] = fuse_navigation(ins_data, dvl_data, dt)
% 状态向量:[x, y, z, vx, vy, vz, wx, wy, wz]
x = [ins_data.pos; ins_data.vel; ins_data.att];
% 预测步骤
F = compute_state_transition_matrix(x, dt);
P = F * P_prior * F' + Q;
% 更新步骤
H = compute_measurement_matrix(x);
K = P * H' / (H * P * H' + R_dvl);
x = x + K * (dvl_data.vel - H * x);
P = (eye(9) - K*H) * P;
state = x;
end
function H = compute_measurement_matrix(x)
% 观测矩阵(仅速度分量可观测)
H = zeros(3,9);
H(1,4) = 1; % x方向速度
H(2,5) = 1; % y方向速度
H(3,6) = 1; % z方向速度
end2. DVL误差补偿模型
matlab
% DVL误差补偿(基于文献的优化方法)
function v_comp = compensate_dvl_error(v_dvl, theta, dtheta, Ly, Lz)
% 方程(9)的实现
theta_avg = (theta + theta_delta)/2;
delta_vx = (Ly * (dtheta) + Lz * (theta_avg)) / 2;
delta_vy = (Lz * (dtheta) - Ly * (theta_avg)) / 2;
v_comp = v_dvl - [delta_vx, delta_vy, 0];
end四、完整仿真流程
-
初始化参数:
matlabfs = 100; % 采样频率(Hz) dt = 1/fs; % 时间步长 T = 3600; % 仿真时长(秒) N = T/dt; % 总步数 -
生成仿真数据:
matlab[true_traj, ins_data, dvl_data] = simulate_navigation(T, fs); -
组合导航解算:
matlabstate_est = zeros(9,N); for k = 1:N [state_est(:,k)] = fuse_navigation(ins_data(:,k), dvl_data(:,k), dt); end -
误差分析:
matlabpos_error = sqrt(sum((true_traj - state_est(1:3,:)).^2,2)); plot(pos_error); title('位置误差随时间变化');
五、实现建议
- 硬件加速 : 使用FPGA实现四元数运算加速(参考Xilinx FFT IP核) GPU并行计算(
gpuArray加速矩阵运算) - 实时性保障: 采用双缓冲机制处理1kHz数据流 任务调度优先级设置(高优先级:姿态解算)
- 容错设计: DVL失效时切换至纯INS模式(位置漂移补偿) 冗余传感器交叉验证(如多DVL阵列)
六、扩展应用方向
-
深度学习辅助:
matlab% 基于LSTM的异常检测 layers = [ ... sequenceInputLayer(9) lstmLayer(20) fullyConnectedLayer(1) regressionLayer]; net = trainNetwork(XTrain,YTrain,layers); -
多传感器融合: 添加视觉SLAM(ORB-SLAM3算法) 集成地磁传感器(姿态辅助)
七、参考
-
代码 关于捷联惯导与多普勒计程仪组合导航的算法程序 www.youwenfan.com/contentcsp/98459.html
-
文献的DVL参数优化方法 www.ship-research.com/cn/article/pdf/preview/10.19693/j.issn.1673-3185.01934.pdf