目录
摘要
本篇文章继续学习尚硅谷深度学习教程,学习内容是输出层的反向传播和代码实现
输出层的反向传播和实现
在输出层,我们一般使用Softmax作为激活函数。
对于Softmax函数:
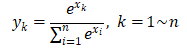
其偏导数为:
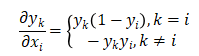
而对于输出层,一般会直接将结果代入损失函数的计算。对于我们之前介绍的分类问题,这里选择交叉熵误差(Cross Entropy Error)作为损失函数,就可以得到一个Softmax-with-Loss层,它包含了Softmax和Cross Entropy Loss两部分。
导数的计算会比较复杂,可以用计算图表示如下:
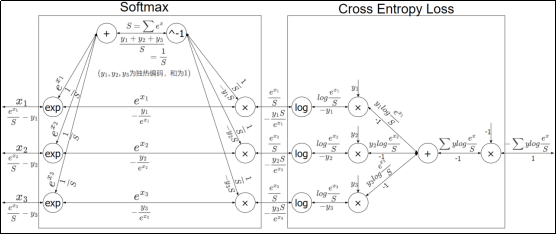
简化得:
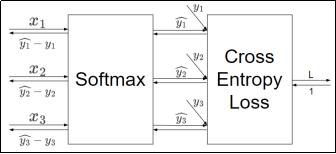
在代码中可以实现为一个类 SoftmaxWithLoss:
class SoftmaxWithLoss:
def __init__(self):
self.loss = None
self.y = None # softmax的输出
self.t = None # 监督数据
def forward(self, x, t):
self.t = t
self.y = softmax(x)
self.loss = cross_entropy_error(self.y, self.t)
return self.loss
def backward(self, dout=1):
batch_size = self.t.shape[0]
if self.t.size == self.y.size: # 监督数据是one-hot-vector的情况
dx = (self.y - self.t) / batch_size
else:
dx = self.y.copy()
dx[np.arange(batch_size), self.t] -= 1
dx = dx / batch_size
return dx