关键词: 拉丁超立方抽样;k-means聚类;光伏不确定性; 主题: 采用LHS进行场景生成,k-means聚类进行场景削减,假设预测服从期望为 0,方差为2的正态分布
在光伏领域,由于光照、天气等因素的影响,光伏输出功率存在较大的不确定性。为了更好地对光伏系统进行规划和管理,我们需要一种有效的方法来处理这种不确定性。今天就来聊聊通过拉丁超立方抽样(LHS)进行场景生成,再利用k - means聚类进行场景削减的技术,这里假设光伏功率预测服从期望为0,方差为2的正态分布。
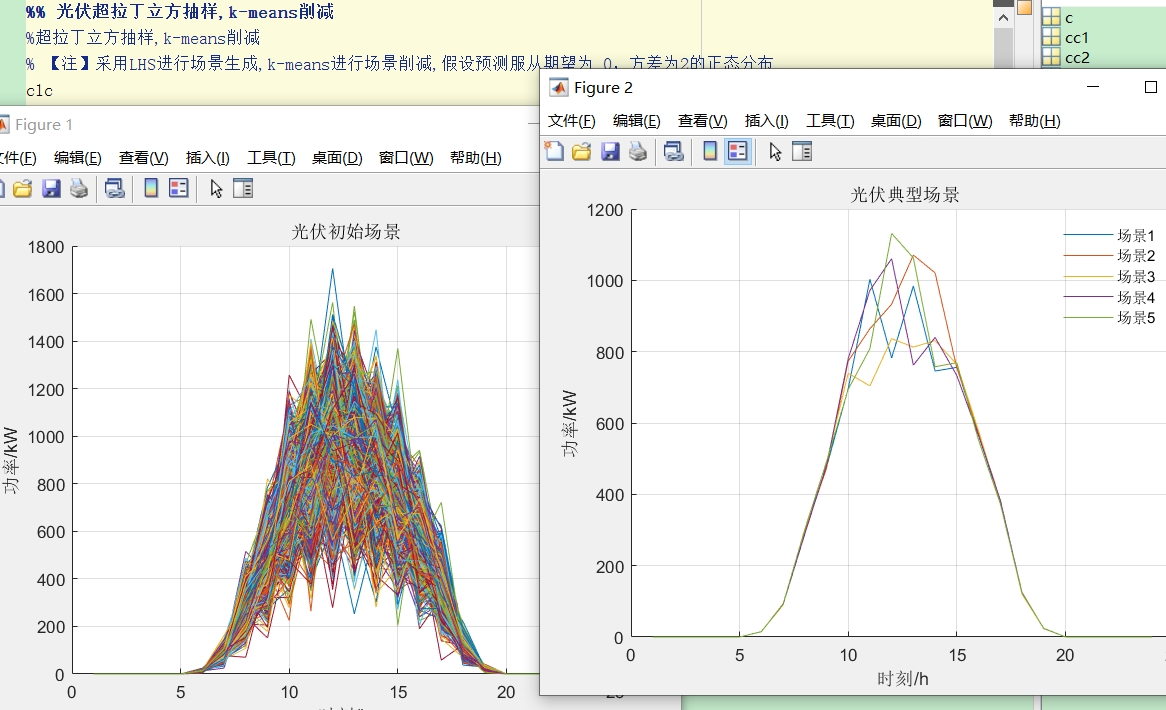
拉丁超立方抽样(LHS)进行场景生成
拉丁超立方抽样是一种高效的抽样方法,相比于传统的蒙特卡洛抽样,它能在较少的样本数量下获得更好的分布覆盖。在光伏不确定性场景生成中,我们可以利用它来生成一系列符合特定分布(这里是期望为0,方差为2的正态分布)的场景。
以下是一段Python代码示例:
python
import numpy as np
from scipy.stats import norm
def lhs_sampling(n_samples, n_dimensions, mean=0, std_dev=np.sqrt(2)):
samples = np.zeros((n_samples, n_dimensions))
intervals = np.linspace(0, 1, n_samples + 1)
for j in range(n_dimensions):
u = np.random.uniform(size=n_samples)
u.sort()
u = (u + np.random.uniform(size=n_samples)) / 2.0
samples[:, j] = norm.ppf((intervals[:n_samples] + u) / (n_samples), loc=mean, scale=std_dev)
return samples
# 示例调用,生成100个样本,1个维度(可根据实际扩展维度)
scenarios = lhs_sampling(100, 1)代码分析:
lhssampling**函数接受样本数量nsamples,维度数量ndimensions*,以及分布的均值mean和标准差std*dev(由于方差为2,这里标准差为sqrt(2))作为参数。intervals划分了抽样的区间。- 双重循环中,外层循环针对每个维度,内层循环对每个样本进行操作。首先生成均匀分布的随机数
u并排序,然后通过特定的计算将其转换到合适的位置。 - 最后利用正态分布的百分点函数
norm.ppf将均匀分布转换为符合我们期望的正态分布样本。
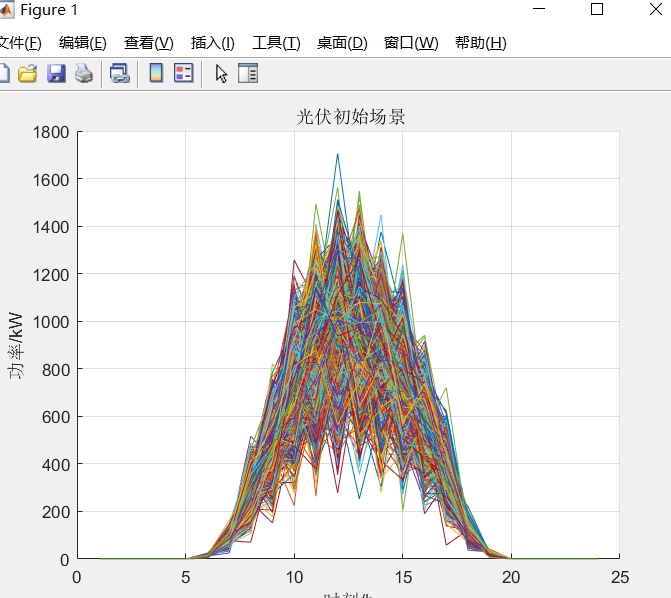
k - means聚类进行场景削减
生成的场景数量可能较多,不利于后续分析,这时就需要场景削减技术。k - means聚类是一种常用的无监督学习算法,可将相似的场景归为一类,从而削减场景数量。
以下是Python代码实现:
python
from sklearn.cluster import KMeans
# 假设我们已经通过LHS得到了scenarios样本
k = 10 # 假设选择10个聚类中心,可根据实际调整
kmeans = KMeans(n_clusters=k, random_state=0).fit(scenarios)
reduced_scenarios = kmeans.cluster_centers_代码分析:
- 首先导入
KMeans类。 - 定义
k为聚类中心的数量,这里设为10,这个值需要根据实际情况调整。如果k太小,可能会丢失重要信息;如果k太大,则达不到削减场景的目的。 - 使用
KMeans类创建聚类模型,并调用fit方法对通过LHS生成的场景数据scenarios进行聚类。 - 聚类完成后,通过
clustercenters 属性获取聚类中心,这些聚类中心就可以作为削减后的场景,大大减少了场景数量,同时保留了原始场景的主要特征。
通过拉丁超立方抽样生成场景,再利用k - means聚类进行场景削减,我们能够有效地处理光伏不确定性带来的大量场景数据,为光伏系统的进一步分析和决策提供便利。这种方法在实际的光伏电站规划、电力系统调度等方面都有着重要的应用价值。