cpp
void inflateGammaValues(
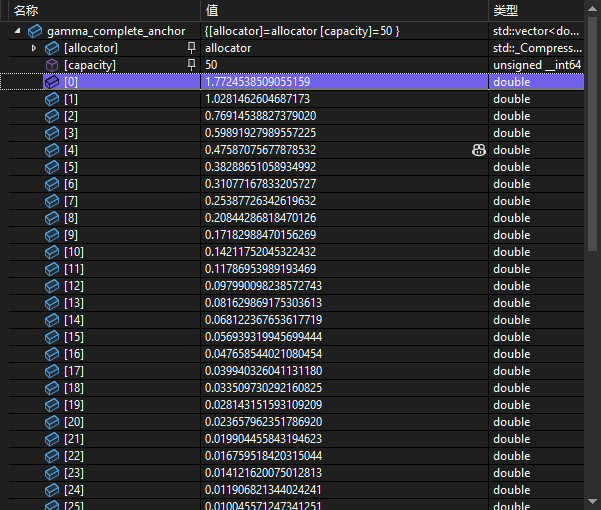
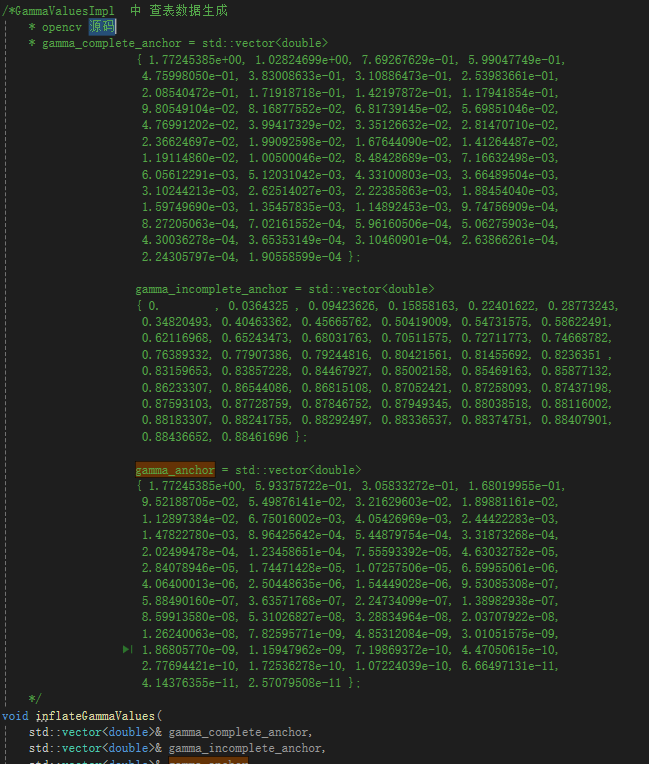
std::vector<double>& gamma_complete_anchor,
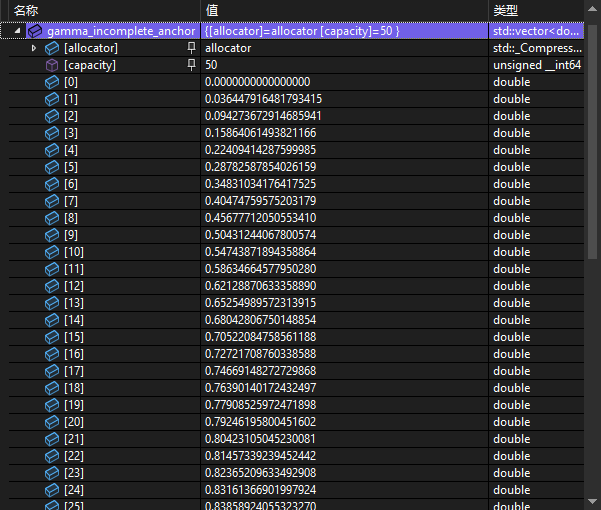
std::vector<double>& gamma_incomplete_anchor,
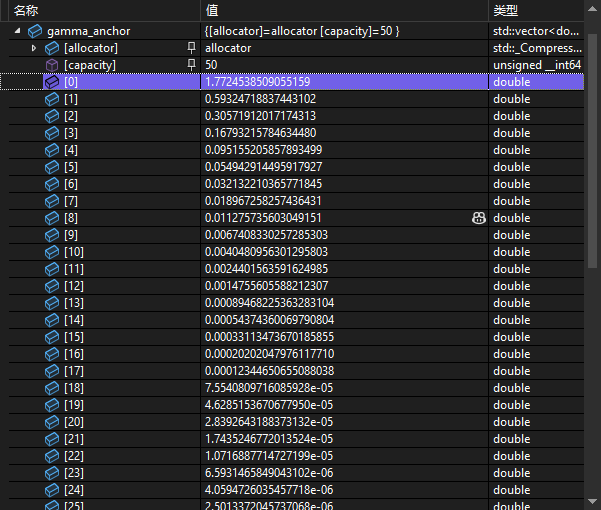
std::vector<double>& gamma_anchor,
double max_thr=7.5, double gamma_quantile = 3.04, double DOF=2,int number_of_anchor_points=50)
{
//上不完全gamma
gamma_complete_anchor= std::vector<double>(number_of_anchor_points),
//下不完全gamma
gamma_incomplete_anchor= std::vector<double>(number_of_anchor_points),
//上不完全gamma
gamma_anchor= std::vector<double>(number_of_anchor_points);
const double step0 = max_thr / (number_of_anchor_points-1);
const double step1 = max_thr* gamma_quantile / (number_of_anchor_points - 1);
const double n_plus_1_div_2 = (DOF + 1.0) / 2.0;
const double n_minus_1_div_2 = (DOF - 1.0) / 2.0;
const double gamma_n_plus = boost::math::tgamma(n_plus_1_div_2);
const double gamma_n_minus = boost::math::tgamma(n_minus_1_div_2);
for (int i = 0; i < number_of_anchor_points; ++i)
{
gamma_complete_anchor[i]= boost::math::gamma_q(n_minus_1_div_2, step0 * i) * gamma_n_minus;
gamma_incomplete_anchor[i] = boost::math::gamma_p(n_plus_1_div_2, step0 * i) * gamma_n_plus;
gamma_anchor[i] = boost::math::gamma_q(n_minus_1_div_2, step1 * i) * gamma_n_minus;
}
}