前言
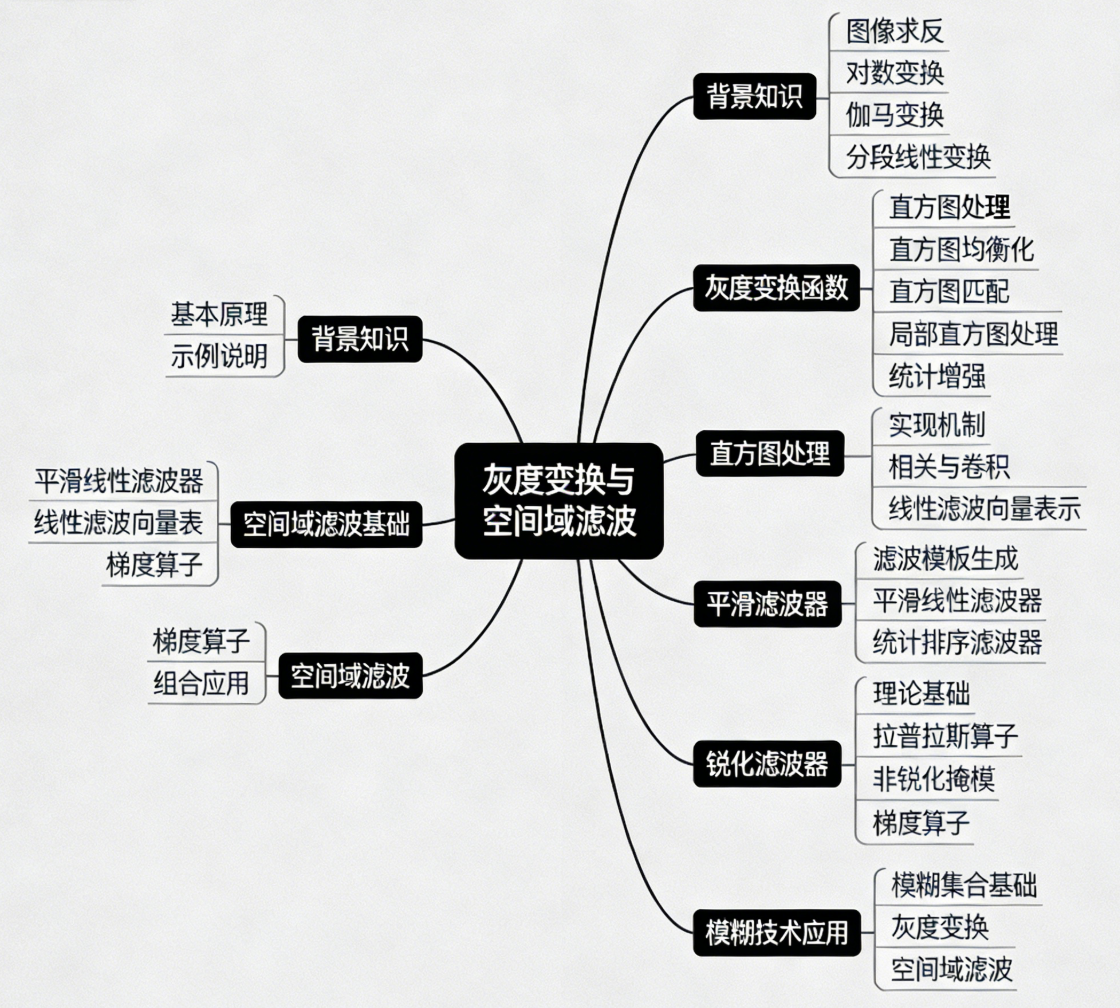
大家好!今天给大家分享《数字图像处理》中最核心的章节之一 ------ 灰度变换与空间域滤波。这一章是图像增强的基础,不管是图像的对比度调整、去噪还是锐化,都离不开这些核心技术。本文会结合完整可运行的 Python 代码,对每个知识点进行通俗易懂的讲解,并通过效果对比图直观展示处理效果,方便大家动手实践。
3.1 背景知识
3.1.1 灰度变换与空间域滤波的基本原理
- 灰度变换 :直接对图像的每个像素灰度值进行数学变换,改变像素的灰度范围或分布,核心是
s = T(r)(r 为原始灰度,s 为变换后灰度,T 为变换函数)。 - 空间域滤波:基于像素的邻域(空间位置)进行操作,通过卷积 / 相关运算,用滤波模板(核)对像素邻域加权求和,实现去噪、锐化等效果。
3.1.2 本章示例说明
本文所有示例均基于 Python 实现,依赖库包括:numpy(数值计算)、cv2(图像读取 / 处理)、matplotlib(可视化)、skimage(直方图处理辅助)。环境准备:
pip install numpy opencv-python matplotlib scikit-image3.2 常用灰度变换函数
3.2.1 图像求反
原理:对灰度值取反,公式:

完整代码:
import cv2
import numpy as np
import matplotlib.pyplot as plt
# 设置中文字体,避免乱码
plt.rcParams['font.sans-serif'] = ['SimHei']
plt.rcParams['axes.unicode_minus'] = False
# 读取图像(灰度模式)
img = cv2.imread('test_img.jpg', cv2.IMREAD_GRAYSCALE)
if img is None:
raise ValueError("请确保test_img.jpg文件存在于当前目录!")
# 3.2.1 图像求反
def image_negation(img):
"""图像求反"""
L = 256 # 8位图像灰度级
neg_img = L - 1 - img
return neg_img
# 计算求反图像
neg_img = image_negation(img)
# 可视化对比
plt.figure(figsize=(12, 6))
# 原始图像
plt.subplot(1, 2, 1)
plt.imshow(img, cmap='gray')
plt.title('原始图像')
plt.axis('off')
# 求反图像
plt.subplot(1, 2, 2)
plt.imshow(neg_img, cmap='gray')
plt.title('图像求反结果')
plt.axis('off')
plt.show()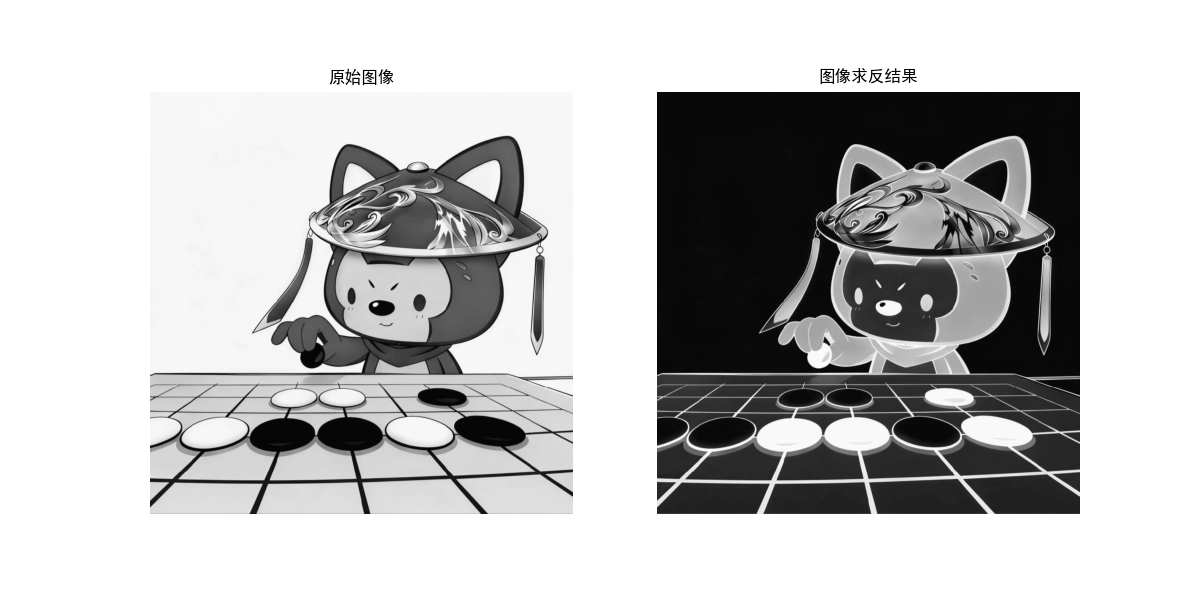
3.2.2 对数变换
原理:压缩高灰度值范围,扩展低灰度值范围,公式:

完整代码:
python
import matplotlib.pyplot as plt
import cv2
import numpy as np
# 设置中文字体,避免乱码
plt.rcParams['font.sans-serif'] = ['SimHei']
plt.rcParams['axes.unicode_minus'] = False
# 3.2.2 对数变换
def log_transform(img):
"""对数变换"""
# 归一化到[0,1],避免数值溢出
img_normalized = img / 255.0
# 计算对数变换,c=1(可调整)
log_img = np.log(1 + img_normalized)
# 归一化回[0,255]
log_img = (log_img / np.max(log_img)) * 255
log_img = log_img.astype(np.uint8)
return log_img
# 读取图像
img = cv2.imread('../picture/Mei.png', cv2.IMREAD_GRAYSCALE)
if img is None:
raise ValueError("请确保test_img.jpg文件存在于当前目录!")
# 计算对数变换图像
log_img = log_transform(img)
# 可视化对比
plt.figure(figsize=(12, 6))
plt.subplot(1, 2, 1)
plt.imshow(img, cmap='gray')
plt.title('原始图像')
plt.axis('off')
plt.subplot(1, 2, 2)
plt.imshow(log_img, cmap='gray')
plt.title('对数变换结果')
plt.axis('off')
plt.show()
3.2.3 幂律(伽马)变换
原理:通过调整伽马值(γ)控制灰度变换趋势,公式:

- γ>1:压缩低灰度,扩展高灰度;
- γ<1:扩展低灰度,压缩高灰度;
- γ=1:无变换。
完整代码:
python
import matplotlib.pyplot as plt
import cv2
import numpy as np
# 设置中文字体,避免乱码
plt.rcParams['font.sans-serif'] = ['SimHei']
plt.rcParams['axes.unicode_minus'] = False
# 3.2.3 伽马变换
def gamma_transform(img, gamma=1.0):
"""伽马变换"""
# 归一化到[0,1]
img_normalized = img / 255.0
# 伽马变换(避免0的幂次问题,加小epsilon)
gamma_img = np.power(img_normalized + 1e-8, gamma)
# 归一化回[0,255]
gamma_img = (gamma_img / np.max(gamma_img)) * 255
gamma_img = gamma_img.astype(np.uint8)
return gamma_img
# 读取图像
img = cv2.imread('../picture/Ren.png', cv2.IMREAD_GRAYSCALE)
if img is None:
raise ValueError("请确保test_img.jpg文件存在于当前目录!")
# 测试不同伽马值
gamma_0_5 = gamma_transform(img, gamma=0.5) # 扩展暗部
gamma_2_0 = gamma_transform(img, gamma=2.0) # 压缩暗部
# 可视化对比
plt.figure(figsize=(18, 6))
plt.subplot(1, 3, 1)
plt.imshow(img, cmap='gray')
plt.title('原始图像')
plt.axis('off')
plt.subplot(1, 3, 2)
plt.imshow(gamma_0_5, cmap='gray')
plt.title('γ=0.5(扩展暗部)')
plt.axis('off')
plt.subplot(1, 3, 3)
plt.imshow(gamma_2_0, cmap='gray')
plt.title('γ=2.0(压缩暗部)')
plt.axis('off')
plt.show()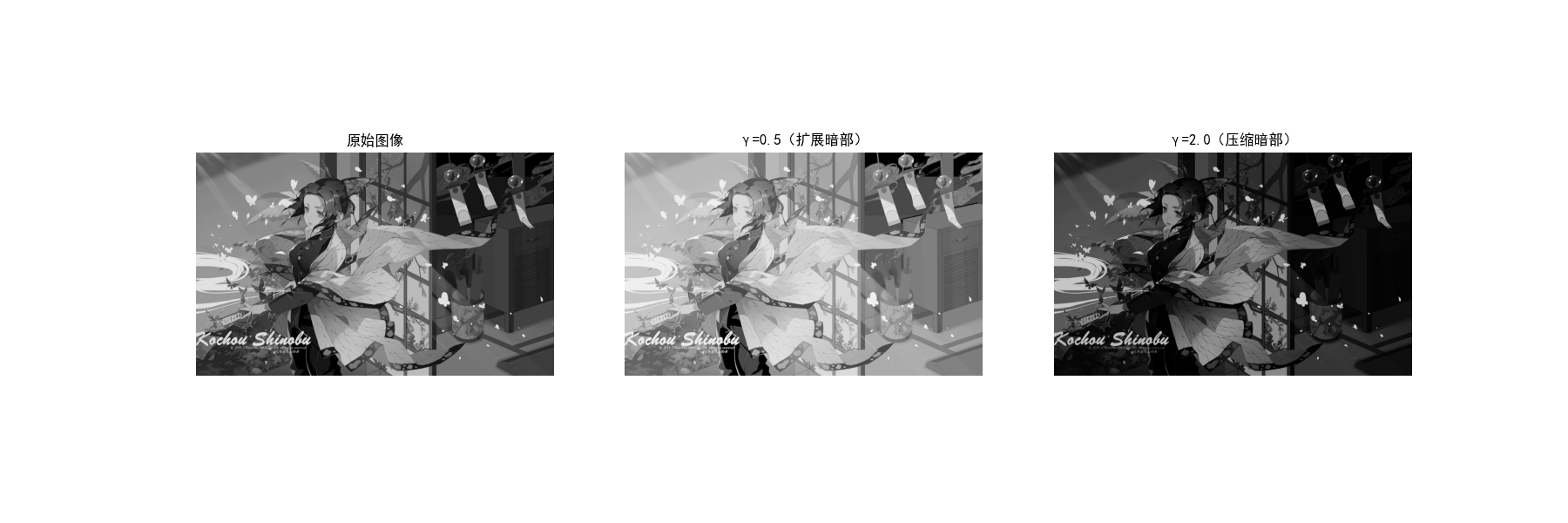
3.2.4 分段线性变换函数
原理:分区间定义线性变换,常用于增强特定灰度范围的对比度(如拉伸感兴趣的灰度区间)。
示例:拉伸灰度区间 50, 150 到 0, 255,其余区间压缩。
完整代码:
python
import matplotlib.pyplot as plt
import cv2
import numpy as np
# 设置中文字体,避免乱码
plt.rcParams['font.sans-serif'] = ['SimHei']
plt.rcParams['axes.unicode_minus'] = False
# 3.2.4 分段线性变换
def piecewise_linear_transform(img):
"""分段线性变换:拉伸[50,150]区间"""
# 创建变换后的图像
piece_img = np.zeros_like(img, dtype=np.float32)
# 分段函数
for i in range(img.shape[0]):
for j in range(img.shape[1]):
r = img[i, j]
if r < 50:
s = 0.5 * r # 压缩低灰度
elif 50 <= r <= 150:
s = 2.55 * (r - 50) # 拉伸中间灰度
else:
s = 200 + 0.55 * (r - 150) # 压缩高灰度
piece_img[i, j] = s
# 裁剪到[0,255]并转换类型
piece_img = np.clip(piece_img, 0, 255).astype(np.uint8)
return piece_img
# 读取图像
img = cv2.imread('../picture/AALi.jpg', cv2.IMREAD_GRAYSCALE)
if img is None:
raise ValueError("请确保test_img.jpg文件存在于当前目录!")
# 计算分段线性变换图像
piece_img = piecewise_linear_transform(img)
# 可视化对比
plt.figure(figsize=(12, 6))
plt.subplot(1, 2, 1)
plt.imshow(img, cmap='gray')
plt.title('原始图像')
plt.axis('off')
plt.subplot(1, 2, 2)
plt.imshow(piece_img, cmap='gray')
plt.title('分段线性变换结果')
plt.axis('off')
plt.show()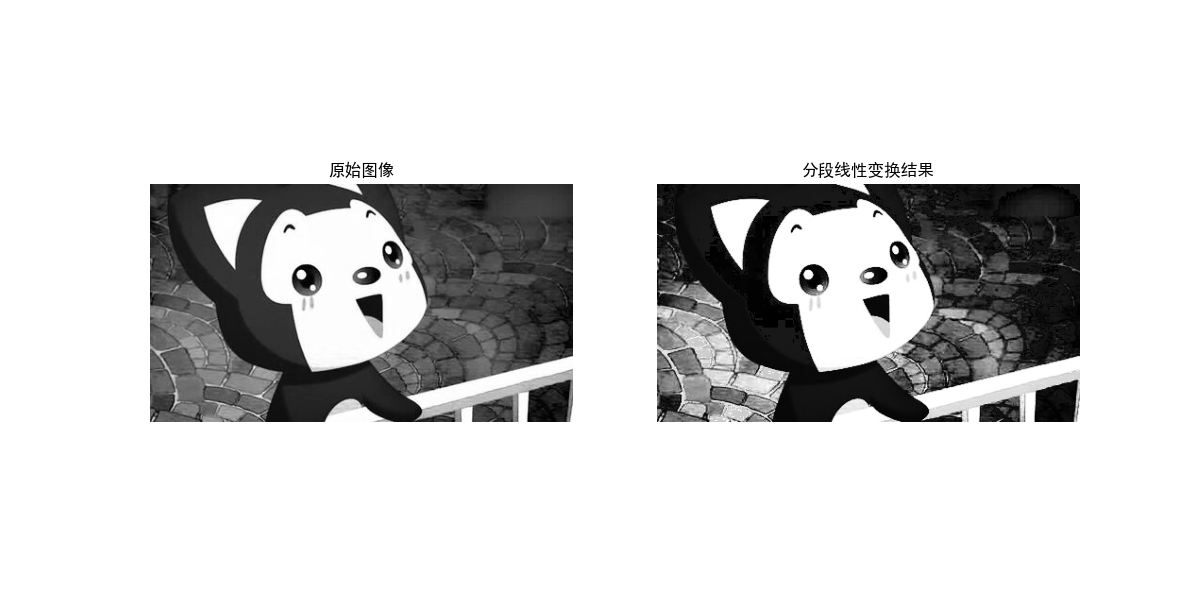
3.3 直方图处理
3.3.1 直方图均衡化
原理:将图像的直方图均匀分布,提升整体对比度,公式:

完整代码:
python
import matplotlib.pyplot as plt
import cv2
import numpy as np
# 设置中文字体,避免乱码
plt.rcParams['font.sans-serif'] = ['SimHei']
plt.rcParams['axes.unicode_minus'] = False
from skimage import exposure
# 3.3.1 直方图均衡化
def histogram_equalization(img):
"""直方图均衡化"""
# 手动实现(也可直接用cv2.equalizeHist)
# 1. 计算直方图
hist, bins = np.histogram(img.flatten(), 256, [0, 256])
# 2. 计算累积分布函数(CDF)
cdf = hist.cumsum()
# 3. 归一化CDF
cdf_normalized = cdf / cdf.max()
# 4. 映射灰度值
eq_img = np.interp(img.flatten(), bins[:-1], cdf_normalized * 255)
eq_img = eq_img.reshape(img.shape).astype(np.uint8)
return eq_img, hist, cdf
# 读取图像
img = cv2.imread('../picture/ALi.jpg', cv2.IMREAD_GRAYSCALE)
if img is None:
raise ValueError("请确保test_img.jpg文件存在于当前目录!")
# 计算均衡化图像及直方图
eq_img, hist_original, cdf_original = histogram_equalization(img)
# 计算均衡化后的直方图
hist_eq, _ = np.histogram(eq_img.flatten(), 256, [0, 256])
# 可视化对比(图像+直方图)
plt.figure(figsize=(18, 10))
# 原始图像
plt.subplot(2, 2, 1)
plt.imshow(img, cmap='gray')
plt.title('原始图像')
plt.axis('off')
# 原始直方图
plt.subplot(2, 2, 2)
plt.plot(hist_original)
plt.title('原始直方图')
plt.xlim([0, 256])
# 均衡化图像
plt.subplot(2, 2, 3)
plt.imshow(eq_img, cmap='gray')
plt.title('直方图均衡化图像')
plt.axis('off')
# 均衡化直方图
plt.subplot(2, 2, 4)
plt.plot(hist_eq)
plt.title('均衡化直方图')
plt.xlim([0, 256])
plt.show()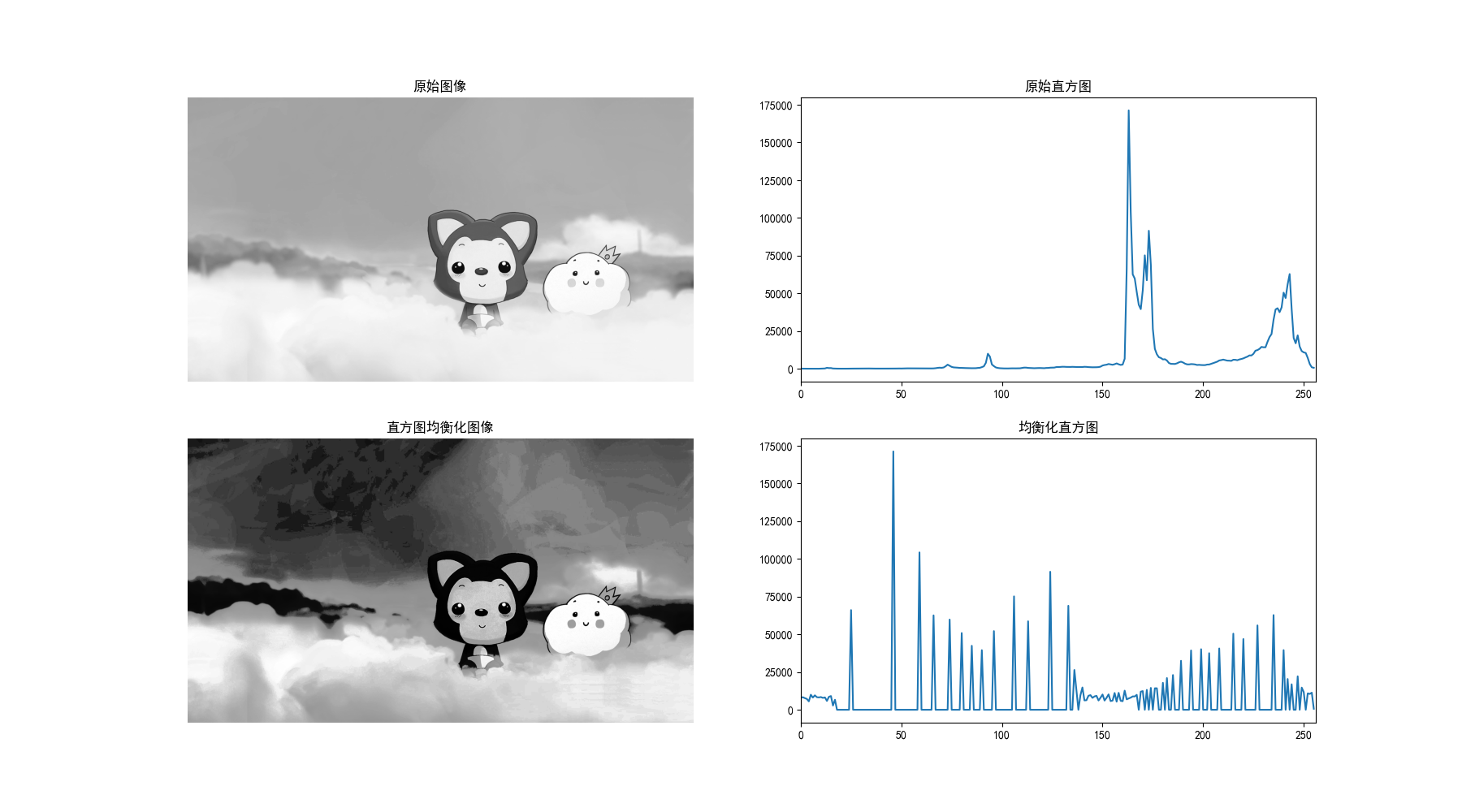
3.3.2 直方图匹配(规定化)
原理:将原始图像的直方图匹配到目标直方图(如正态分布、另一幅图像的直方图),实现可控的对比度调整。
完整代码:
python
import matplotlib.pyplot as plt
import cv2
import numpy as np
# 设置中文字体,避免乱码
plt.rcParams['font.sans-serif'] = ['SimHei']
plt.rcParams['axes.unicode_minus'] = False
# 3.3.2 直方图匹配
def histogram_matching(img, target_hist):
"""
直方图匹配
img: 原始图像
target_hist: 目标直方图(长度256)
返回值:
match_img: 匹配后的图像
hist_original: 原始图像直方图
"""
# 1. 原始图像的CDF
hist_original, _ = np.histogram(img.flatten(), 256, [0, 256])
cdf_original = hist_original.cumsum() / hist_original.sum()
# 2. 目标直方图的CDF
cdf_target = target_hist.cumsum() / target_hist.sum()
# 3. 建立灰度映射表
mapping = np.zeros(256, dtype=np.uint8)
for i in range(256):
# 找到最接近的CDF值
diff = np.abs(cdf_original[i] - cdf_target)
mapping[i] = np.argmin(diff)
# 4. 应用映射
match_img = mapping[img]
return match_img, hist_original # 新增返回原始直方图
# 读取图像(请确认路径正确)
img = cv2.imread('../picture/Water.png', cv2.IMREAD_GRAYSCALE)
if img is None:
# 友好提示:检查路径和文件名,同时给出备选方案
raise ValueError(
"图像读取失败!请检查:\n"
"1. 文件路径 '../picture/ALi.jpg' 是否正确\n"
"2. 文件是否存在且为有效图像格式(jpg/png等)\n"
"3. 替换为你的实际图像路径后重试"
)
# 生成目标直方图(正态分布)
x = np.linspace(0, 255, 256)
target_hist = np.exp(-((x - 128) ** 2) / (2 * 30 ** 2)) # 均值128,方差30
target_hist = (target_hist / target_hist.sum()) * img.size # 归一化到总像素数
# 计算匹配图像(同时接收返回的原始直方图)
match_img, hist_original = histogram_matching(img, target_hist)
# 计算匹配后的直方图
hist_match, _ = np.histogram(match_img.flatten(), 256, [0, 256])
# 可视化对比
plt.figure(figsize=(18, 10))
# 第一行:原始图像、原始直方图、目标直方图
plt.subplot(2, 3, 1)
plt.imshow(img, cmap='gray')
plt.title('原始图像')
plt.axis('off')
plt.subplot(2, 3, 2)
plt.plot(hist_original, color='blue')
plt.title('原始直方图')
plt.xlim([0, 256])
plt.ylim([0, max(hist_original) * 1.1]) # 优化y轴范围,显示更美观
plt.subplot(2, 3, 3)
plt.plot(target_hist, color='red')
plt.title('目标直方图(正态分布)')
plt.xlim([0, 256])
plt.ylim([0, max(target_hist) * 1.1])
# 第二行:匹配后图像、匹配后直方图、空白(保持布局对称)
plt.subplot(2, 3, 4)
plt.imshow(match_img, cmap='gray')
plt.title('直方图匹配图像')
plt.axis('off')
plt.subplot(2, 3, 5)
plt.plot(hist_match, color='green')
plt.title('匹配后直方图')
plt.xlim([0, 256])
plt.ylim([0, max(hist_match) * 1.1])
# 隐藏第六个子图,保持布局整洁
plt.subplot(2, 3, 6)
plt.axis('off')
plt.tight_layout() # 自动调整子图间距,避免标题重叠
plt.show()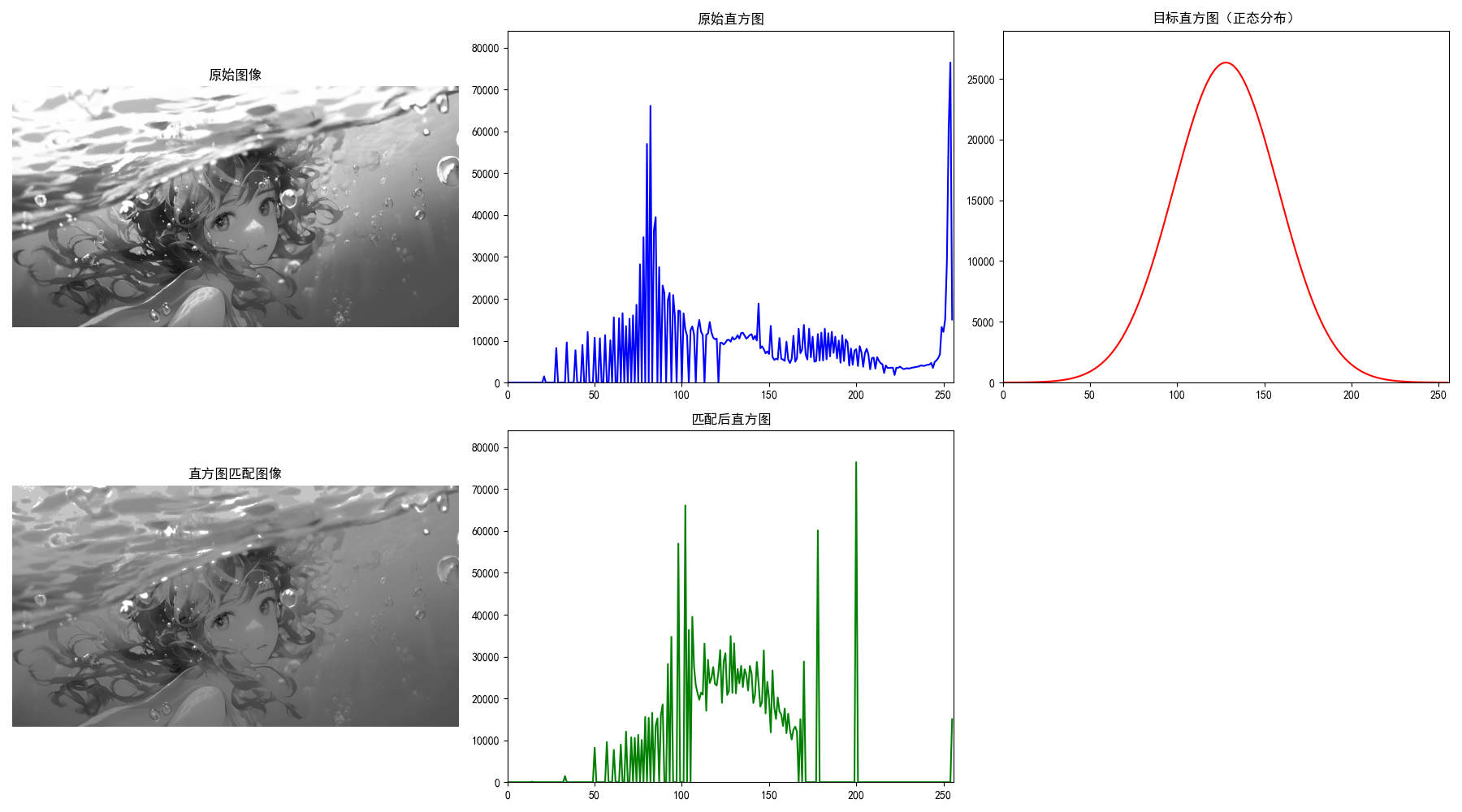
3.3.3 局部直方图处理
原理:对图像的每个像素,基于其邻域(如 3x3、5x5)计算直方图均衡化,增强局部细节(如纹理、边缘)。
完整代码:
python
import matplotlib.pyplot as plt
import cv2
import numpy as np
from skimage import exposure
# 设置中文字体,避免乱码
plt.rcParams['font.sans-serif'] = ['SimHei']
plt.rcParams['axes.unicode_minus'] = False
# 3.3.3 局部直方图均衡化
def local_histogram_equalization(img, block_size=15):
"""
局部直方图均衡化(自适应直方图均衡化)
参数:
img: 输入灰度图像(numpy数组)
block_size: 邻域大小(奇数,建议为3-31之间的奇数)
返回:
local_eq_img: 局部均衡化后的图像
异常处理:
校验block_size为奇数,避免skimage函数报错
"""
# 校验block_size为奇数(equalize_adapthist要求kernel_size为奇数)
if block_size % 2 == 0:
block_size += 1 # 自动转为奇数
print(f"提示:block_size需为奇数,已自动调整为 {block_size}")
# 使用skimage的自适应直方图均衡化函数
local_eq_img = exposure.equalize_adapthist(img, kernel_size=block_size)
# 归一化到[0,255]并转换为8位无符号整数
local_eq_img = (local_eq_img * 255).astype(np.uint8)
return local_eq_img
# 读取图像(请确认路径正确)
img = cv2.imread('../picture/TianHuoSanXuanBian.jpg', cv2.IMREAD_GRAYSCALE)
if img is None:
# 友好的错误提示,帮助排查问题
raise ValueError(
"图像读取失败!请检查:\n"
"1. 文件路径 '../picture/Water.png' 是否正确\n"
"2. 文件是否存在且为有效图像格式(jpg/png等)\n"
"3. 替换为你的实际图像路径后重试"
)
# 计算局部均衡化图像(block_size=15)
local_eq_img = local_histogram_equalization(img, block_size=15)
# 可视化对比(原始图像 vs 局部均衡化图像)
plt.figure(figsize=(12, 6))
# 原始图像
plt.subplot(1, 2, 1)
plt.imshow(img, cmap='gray')
plt.title('原始图像')
plt.axis('off') # 关闭坐标轴,更美观
# 局部直方图均衡化结果
plt.subplot(1, 2, 2)
plt.imshow(local_eq_img, cmap='gray')
plt.title(f'局部直方图均衡化结果(block_size=15)')
plt.axis('off')
# 自动调整子图间距,避免标题重叠
plt.tight_layout()
plt.show()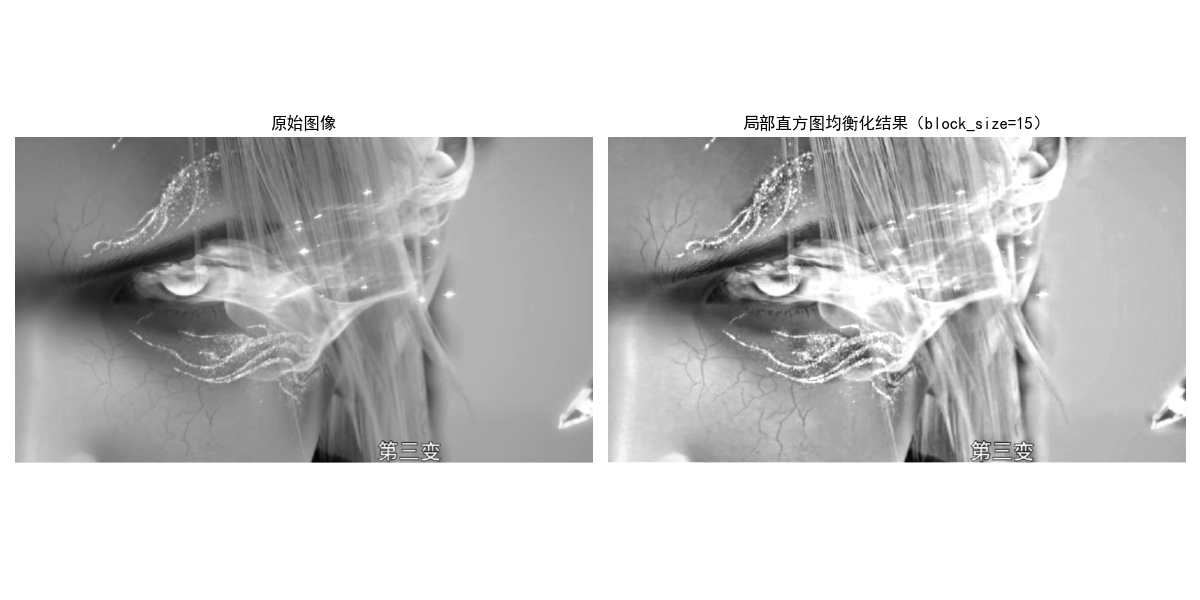
3.3.4 基于直方图统计的图像增强
原理:利用直方图的统计特征(如均值、方差、峰值)调整灰度,示例:基于均值和方差的对比度拉伸。
完整代码:
python
import matplotlib.pyplot as plt
import cv2
import numpy as np
plt.rcParams['font.sans-serif'] = ['SimHei']
plt.rcParams['axes.unicode_minus'] = False
# 3.3.4 基于直方图统计的增强
def stats_based_enhancement(img):
"""基于均值和方差的对比度拉伸"""
# 计算直方图统计特征
mean_gray = np.mean(img) # 灰度均值
std_gray = np.std(img) # 灰度标准差
# 对比度拉伸:s = (r - mean) * k + mean,k为拉伸系数
k = 255 / (6 * std_gray) # 6σ原则覆盖大部分像素
stats_img = (img - mean_gray) * k + mean_gray
# 裁剪到[0,255]
stats_img = np.clip(stats_img, 0, 255).astype(np.uint8)
return stats_img
# 读取图像(请确认路径正确)
img = cv2.imread('../picture/XiaDie.png', cv2.IMREAD_GRAYSCALE)
if img is None:
# 友好的错误提示,帮助排查问题
raise ValueError(
"图像读取失败!请检查:\n"
"1. 文件路径 '../picture/Water.png' 是否正确\n"
"2. 文件是否存在且为有效图像格式(jpg/png等)\n"
"3. 替换为你的实际图像路径后重试"
)
# 计算统计增强图像
stats_img = stats_based_enhancement(img)
# 可视化对比
plt.figure(figsize=(12, 6))
plt.subplot(1, 2, 1)
plt.imshow(img, cmap='gray')
plt.title('原始图像')
plt.axis('off')
plt.subplot(1, 2, 2)
plt.imshow(stats_img, cmap='gray')
plt.title('直方图统计增强结果')
plt.axis('off')
plt.show()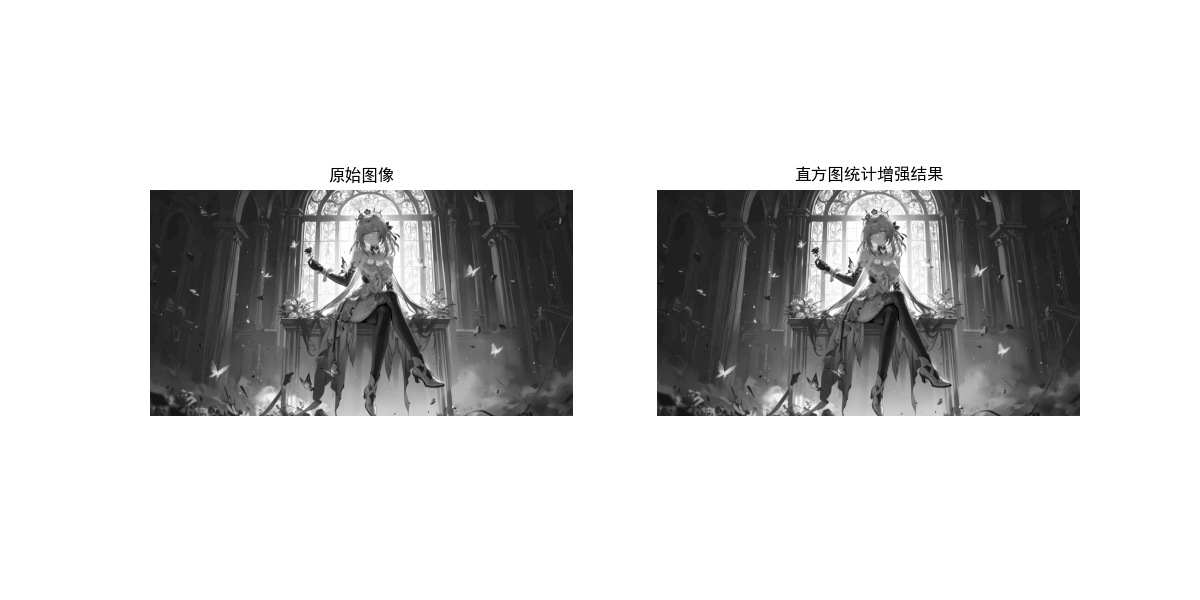
3.4 空间域滤波基础
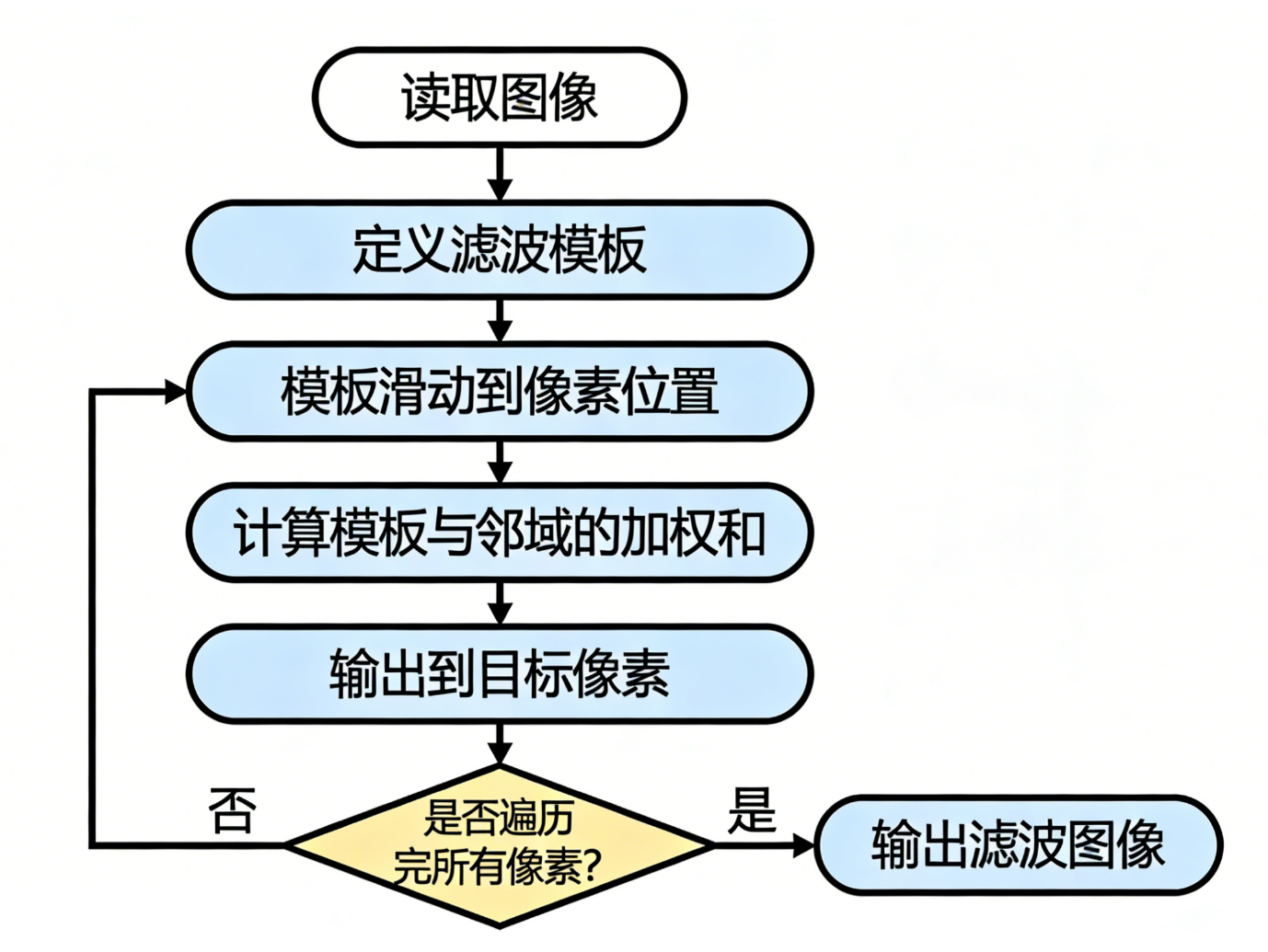
3.4.1 空间域滤波的实现机制
原理:滤波模板(核)在图像上滑动,每个位置的输出为模板与对应图像邻域的加权和。
3.4.2 空间域相关与卷积
- 相关:模板直接与邻域相乘求和(无翻转);
- 卷积:模板先沿中心翻转,再与邻域相乘求和(数字图像处理中常简化为相关)。
3.4.3 线性滤波的向量表示
将图像邻域和模板都展开为向量,滤波结果为向量点积:

3.4.4 空间滤波模板的生成
示例:生成均值滤波模板、高斯滤波模板。
完整代码:
python
import numpy as np
import matplotlib.pyplot as plt
# 设置中文字体,避免可视化时乱码
plt.rcParams['font.sans-serif'] = ['SimHei']
plt.rcParams['axes.unicode_minus'] = False
# 3.4.4 滤波模板生成
def generate_filter_templates():
"""
生成常用的空间域滤波模板(核)
返回值:
mean_3x3: 3x3均值滤波模板
gauss_5x5: 5x5高斯滤波模板(σ=1.5)
laplacian_4: 4邻域拉普拉斯锐化模板
sobel_x: Sobel X方向梯度模板
sobel_y: Sobel Y方向梯度模板
"""
# 1. 3x3均值滤波模板(平滑用)
mean_3x3 = np.ones((3, 3)) / 9.0 # 均值模板:所有元素和为1,保证亮度不变
# 2. 5x5高斯滤波模板(σ=1.5,平滑+抗噪)
x, y = np.meshgrid(np.linspace(-2, 2, 5), np.linspace(-2, 2, 5)) # 生成坐标网格
gauss_5x5 = np.exp(-(x ** 2 + y ** 2) / (2 * 1.5 ** 2)) # 高斯公式
gauss_5x5 = gauss_5x5 / np.sum(gauss_5x5) # 归一化:所有元素和为1
# 3. 4邻域拉普拉斯锐化模板(二阶微分,增强边缘)
laplacian_4 = np.array([[0, 1, 0],
[1, -4, 1],
[0, 1, 0]])
# 4. Sobel X方向梯度模板(检测水平边缘)
sobel_x = np.array([[-1, 0, 1],
[-2, 0, 2],
[-1, 0, 1]])
# 5. Sobel Y方向梯度模板(检测垂直边缘)
sobel_y = np.array([[-1, -2, -1],
[0, 0, 0],
[1, 2, 1]])
return mean_3x3, gauss_5x5, laplacian_4, sobel_x, sobel_y
# 生成所有滤波模板
mean_3x3, gauss_5x5, laplacian_4, sobel_x, sobel_y = generate_filter_templates()
# 打印模板(保留4位小数,更易读)
print("=" * 50)
print("3x3均值滤波模板(平滑用):")
print(np.round(mean_3x3, 4))
print("\n5x5高斯滤波模板(σ=1.5,平滑+抗噪):")
print(np.round(gauss_5x5, 4))
print("\n3x3 4邻域拉普拉斯模板(锐化用):")
print(laplacian_4)
print("\n3x3 Sobel X方向模板(检测水平边缘):")
print(sobel_x)
print("\n3x3 Sobel Y方向模板(检测垂直边缘):")
print(sobel_y)
print("=" * 50)
# 可视化滤波模板(直观展示模板数值分布)
def plot_filter_template(template, title):
"""可视化单个滤波模板"""
plt.figure(figsize=(6, 6))
# 热力图展示模板数值
plt.imshow(template, cmap='coolwarm', interpolation='none')
plt.title(title, fontsize=12)
plt.axis('off') # 关闭坐标轴
# 在每个像素位置标注数值(保留4位小数)
for i in range(template.shape[0]):
for j in range(template.shape[1]):
text = plt.text(j, i, f'{template[i, j]:.4f}',
ha="center", va="center", color="black", fontsize=10)
plt.tight_layout()
plt.show()
# 可视化核心模板(可选,注释掉可只打印数值)
plot_filter_template(mean_3x3, "3x3均值滤波模板")
plot_filter_template(gauss_5x5, "5x5高斯滤波模板(σ=1.5)")
plot_filter_template(laplacian_4, "3x3 4邻域拉普拉斯模板")
plot_filter_template(sobel_x, "3x3 Sobel X方向模板")
plot_filter_template(sobel_y, "3x3 Sobel Y方向模板")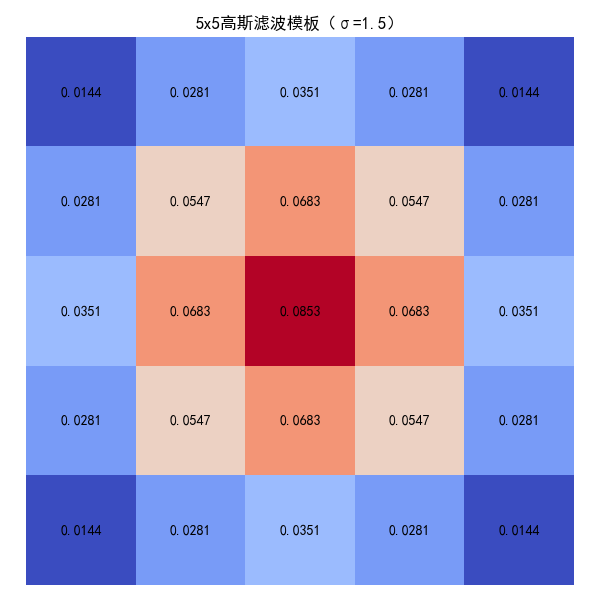
3.5 平滑空间滤波器
3.5.1 平滑线性滤波器
原理:通过邻域平均降低噪声(如均值滤波、高斯滤波)。
完整代码:
python
import cv2
import numpy as np
import matplotlib.pyplot as plt
# ===================== 基础配置 =====================
# 设置中文字体,避免可视化时乱码
plt.rcParams['font.sans-serif'] = ['SimHei']
plt.rcParams['axes.unicode_minus'] = False
# ===================== 滤波模板生成函数(依赖项) =====================
def generate_filter_templates():
"""生成平滑滤波所需的模板(均值+高斯)"""
# 1. 3x3均值模板
mean_3x3 = np.ones((3, 3)) / 9.0
# 2. 5x5高斯模板(σ=1.5)
x, y = np.meshgrid(np.linspace(-2, 2, 5), np.linspace(-2, 2, 5))
gauss_5x5 = np.exp(-(x ** 2 + y ** 2) / (2 * 1.5 ** 2))
gauss_5x5 = gauss_5x5 / np.sum(gauss_5x5) # 归一化,保证亮度不变
return mean_3x3, gauss_5x5
# ===================== 平滑线性滤波器核心函数 =====================
def smooth_linear_filter(img, mean_template, gauss_template):
"""
平滑线性滤波器(均值滤波+高斯滤波)
参数:
img: 输入灰度图像(numpy数组)
mean_template: 均值滤波模板(如3x3均值模板)
gauss_template: 高斯滤波模板(如5x5高斯模板)
返回:
noisy_img: 添加高斯噪声后的图像
mean_filtered: 均值滤波结果
gauss_filtered: 高斯滤波结果
"""
# 1. 添加高斯噪声(模拟噪声图像,用于测试去噪效果)
# 注意:先转换为float32避免溢出,再转回uint8
img_float = img.astype(np.float32)
noise = np.random.normal(0, 20, img.shape).astype(np.float32) # 均值0,标准差20
noisy_img = img_float + noise
noisy_img = np.clip(noisy_img, 0, 255).astype(np.uint8) # 裁剪到[0,255]
# 2. 3x3均值滤波(cv2.filter2D:-1表示输出图像深度与输入一致)
mean_filtered = cv2.filter2D(noisy_img, -1, mean_template)
# 3. 5x5高斯滤波
gauss_filtered = cv2.filter2D(noisy_img, -1, gauss_template)
return noisy_img, mean_filtered, gauss_filtered
# ===================== 主程序 =====================
if __name__ == "__main__":
# 1. 读取图像(请替换为你的图像路径)
img = cv2.imread('../picture/SaiLinNa.png', cv2.IMREAD_GRAYSCALE)
if img is None:
raise ValueError(
"图像读取失败!请检查:\n"
"1. 文件路径 '../picture/Water.png' 是否正确\n"
"2. 文件是否存在且为有效图像格式(jpg/png等)\n"
"3. 替换为你的实际图像路径后重试"
)
# 2. 生成滤波模板
mean_3x3, gauss_5x5 = generate_filter_templates()
# 3. 执行平滑滤波
noisy_img, mean_filtered, gauss_filtered = smooth_linear_filter(img, mean_3x3, gauss_5x5)
# 4. 可视化对比(加噪图像 vs 均值滤波 vs 高斯滤波)
plt.figure(figsize=(18, 6))
# 子图1:加噪图像
plt.subplot(1, 3, 1)
plt.imshow(noisy_img, cmap='gray')
plt.title('加噪图像(高斯噪声,σ=20)', fontsize=12)
plt.axis('off') # 关闭坐标轴,更美观
# 子图2:3x3均值滤波结果
plt.subplot(1, 3, 2)
plt.imshow(mean_filtered, cmap='gray')
plt.title('3x3均值滤波结果', fontsize=12)
plt.axis('off')
# 子图3:5x5高斯滤波结果
plt.subplot(1, 3, 3)
plt.imshow(gauss_filtered, cmap='gray')
plt.title('5x5高斯滤波结果(σ=1.5)', fontsize=12)
plt.axis('off')
# 自动调整子图间距,避免标题/边界重叠
plt.tight_layout()
plt.show()
# 可选:保存结果(如需保存,取消注释)
# cv2.imwrite('noisy_img.jpg', noisy_img)
# cv2.imwrite('mean_filtered.jpg', mean_filtered)
# cv2.imwrite('gauss_filtered.jpg', gauss_filtered)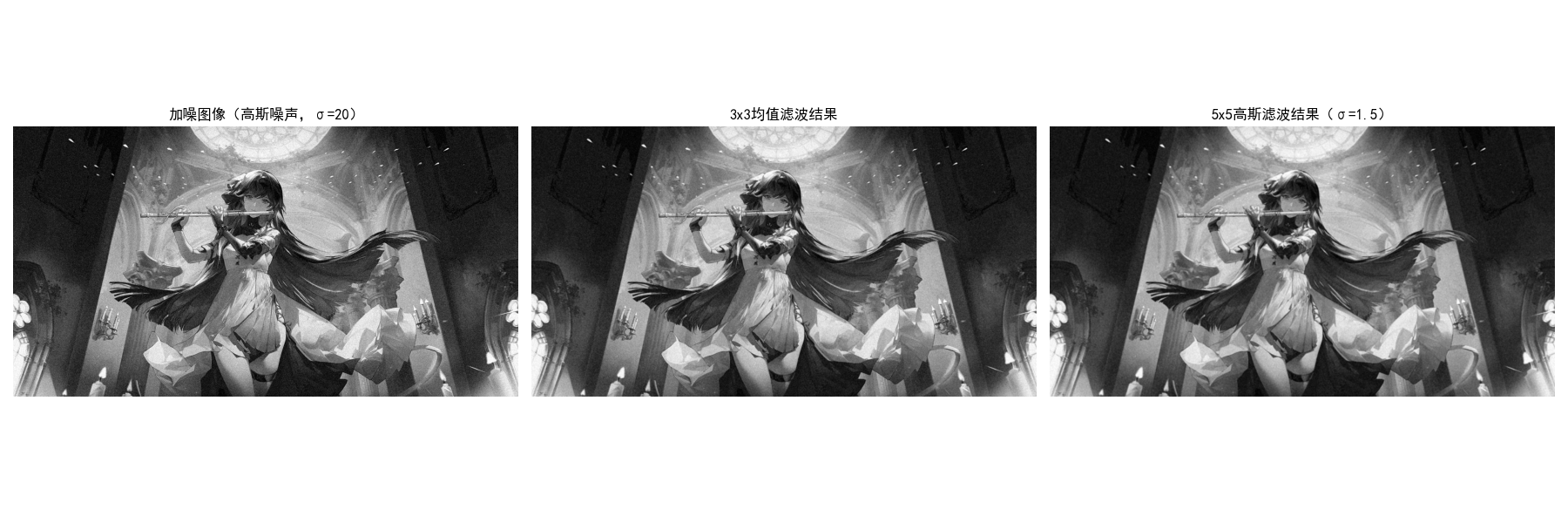
3.5.2 统计排序(非线性)滤波器
原理:基于邻域像素的排序结果(如中值、最大值、最小值)替换中心像素,去噪效果优于线性滤波(尤其是椒盐噪声)。
完整代码:
python
import cv2
import numpy as np
import matplotlib.pyplot as plt
# ===================== 基础配置 =====================
# 设置中文字体,避免可视化时乱码
plt.rcParams['font.sans-serif'] = ['SimHei']
plt.rcParams['axes.unicode_minus'] = False
# ===================== 统计排序滤波器核心函数 =====================
def statistical_filter(img, noise_prob=0.05):
"""
统计排序滤波器(中值/最大值/最小值滤波),专用于处理椒盐噪声
参数:
img: 输入灰度图像(numpy数组)
noise_prob: 椒盐噪声概率(默认0.05,即5%的像素被污染)
返回:
noisy_img: 添加椒盐噪声后的图像
median_filtered: 3x3中值滤波结果
max_filtered: 3x3最大值滤波结果(去椒噪声)
min_filtered: 3x3最小值滤波结果(去盐噪声)
"""
# 内部函数:添加椒盐噪声
def add_salt_pepper_noise(img, prob):
noisy_img = img.copy()
h, w = img.shape
# 生成随机掩码,控制噪声位置
random_mask = np.random.rand(h, w)
# 盐噪声(白色,像素值255):概率prob/2
salt_mask = random_mask < prob / 2
noisy_img[salt_mask] = 255
# 椒噪声(黑色,像素值0):概率prob/2
pepper_mask = (random_mask >= prob / 2) & (random_mask < prob)
noisy_img[pepper_mask] = 0
return noisy_img
# 1. 添加椒盐噪声
noisy_img = add_salt_pepper_noise(img, noise_prob)
# 2. 3x3中值滤波(去椒盐噪声的最优选择)
median_filtered = cv2.medianBlur(noisy_img, 3) # 3表示核大小为3x3
# 3. 3x3最大值滤波(膨胀操作,去除椒噪声/黑色噪声)
kernel = np.ones((3, 3), np.uint8) # 3x3结构元素
max_filtered = cv2.dilate(noisy_img, kernel)
# 4. 3x3最小值滤波(腐蚀操作,去除盐噪声/白色噪声)
min_filtered = cv2.erode(noisy_img, kernel)
return noisy_img, median_filtered, max_filtered, min_filtered
# ===================== 主程序 =====================
if __name__ == "__main__":
# 1. 读取图像(请替换为你的图像路径)
img = cv2.imread('../picture/DiPingXian.png', cv2.IMREAD_GRAYSCALE)
if img is None:
raise ValueError(
"图像读取失败!请检查:\n"
"1. 文件路径 '../picture/Water.png' 是否正确\n"
"2. 文件是否存在且为有效图像格式(jpg/png等)\n"
"3. 替换为你的实际图像路径后重试"
)
# 2. 执行统计排序滤波(噪声概率设为5%)
noisy_img, median_filtered, max_filtered, min_filtered = statistical_filter(img, noise_prob=0.05)
# 3. 可视化对比(4张子图:加噪图+中值+最大值+最小值)
plt.figure(figsize=(20, 6))
# 子图1:添加椒盐噪声的图像
plt.subplot(1, 4, 1)
plt.imshow(noisy_img, cmap='gray')
plt.title(f'加噪图像(椒盐噪声,概率={0.05})', fontsize=12)
plt.axis('off')
# 子图2:3x3中值滤波结果(最优去噪)
plt.subplot(1, 4, 2)
plt.imshow(median_filtered, cmap='gray')
plt.title('3x3中值滤波(去椒盐噪声)', fontsize=12)
plt.axis('off')
# 子图3:3x3最大值滤波结果(去椒噪声)
plt.subplot(1, 4, 3)
plt.imshow(max_filtered, cmap='gray')
plt.title('3x3最大值滤波(去椒噪声)', fontsize=12)
plt.axis('off')
# 子图4:3x3最小值滤波结果(去盐噪声)
plt.subplot(1, 4, 4)
plt.imshow(min_filtered, cmap='gray')
plt.title('3x3最小值滤波(去盐噪声)', fontsize=12)
plt.axis('off')
# 自动调整子图间距,避免标题重叠
plt.tight_layout()
plt.show()
# 可选:保存结果(如需保存,取消注释)
# cv2.imwrite('salt_pepper_noisy.jpg', noisy_img)
# cv2.imwrite('median_filtered.jpg', median_filtered)
# cv2.imwrite('max_filtered.jpg', max_filtered)
# cv2.imwrite('min_filtered.jpg', min_filtered)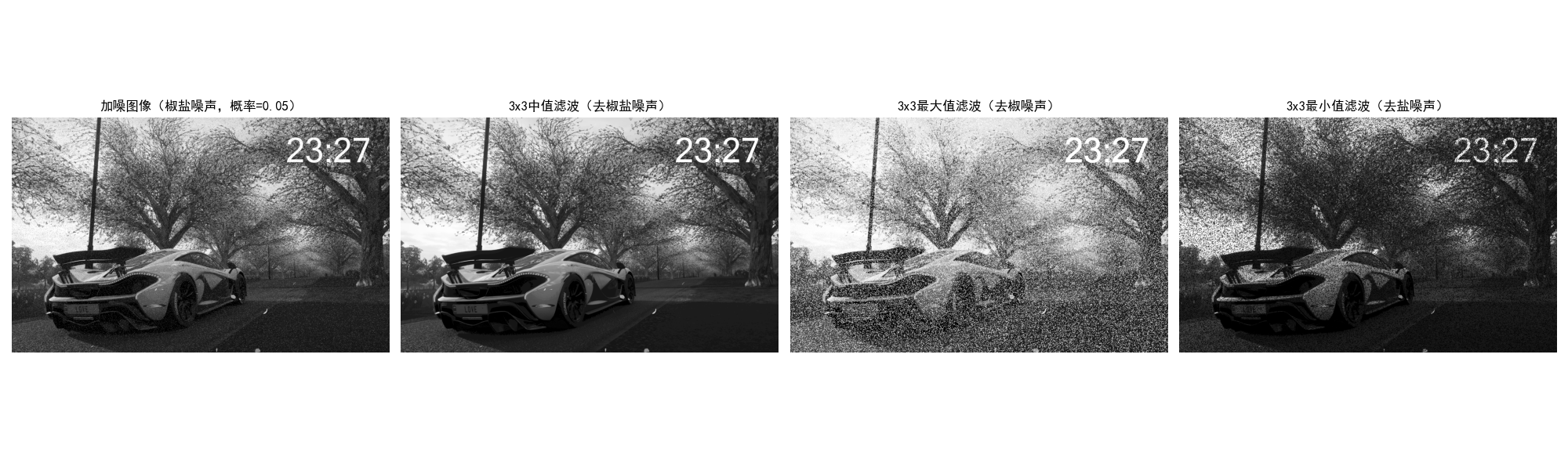
3.6 锐化空间滤波器
3.6.1 理论基础
原理:锐化通过增强图像的边缘和细节实现,基于微分(一阶 / 二阶):
- 一阶微分:梯度(反映灰度变化率);
- 二阶微分:拉普拉斯(反映灰度变化的曲率)。
3.6.2 基于二阶微分的图像锐化 ------ 拉普拉斯算子
原理:公式:

完整代码:
python
import cv2
import numpy as np
import matplotlib.pyplot as plt
# ===================== 基础配置 =====================
# 设置中文字体,避免可视化时乱码
plt.rcParams['font.sans-serif'] = ['SimHei']
plt.rcParams['axes.unicode_minus'] = False
# ===================== 拉普拉斯算子锐化核心函数 =====================
def laplacian_sharpening(img):
"""
拉普拉斯算子图像锐化(4邻域+8邻域)
原理:锐化图像 = 原始图像 - 拉普拉斯图像(增强边缘细节)
参数:
img: 输入灰度图像(numpy数组)
返回:
sharp_4: 4邻域拉普拉斯锐化结果
sharp_8: 8邻域拉普拉斯锐化结果
lap_4: 4邻域拉普拉斯变换结果(可选分析用)
lap_8: 8邻域拉普拉斯变换结果(可选分析用)
"""
# 1. 定义拉普拉斯模板(二阶微分,增强边缘)
# 4邻域拉普拉斯模板(仅上下左右)
laplacian_4 = np.array([[0, 1, 0],
[1, -4, 1],
[0, 1, 0]], dtype=np.float32)
# 8邻域拉普拉斯模板(包含对角线)
laplacian_8 = np.array([[1, 1, 1],
[1, -8, 1],
[1, 1, 1]], dtype=np.float32)
# 2. 转换图像为浮点型,避免运算溢出
img_float = img.astype(np.float32)
# 3. 计算拉普拉斯变换(二阶微分结果)
lap_4 = cv2.filter2D(img_float, -1, laplacian_4)
lap_8 = cv2.filter2D(img_float, -1, laplacian_8)
# 4. 拉普拉斯锐化:原始图像 - 拉普拉斯图像(增强边缘)
# 注:也可使用 img + c*lap (c=-1),效果等价
sharp_4 = img_float - lap_4
sharp_8 = img_float - lap_8
# 5. 裁剪数值范围到[0,255],避免溢出导致的伪影
sharp_4 = np.clip(sharp_4, 0, 255).astype(np.uint8)
sharp_8 = np.clip(sharp_8, 0, 255).astype(np.uint8)
return sharp_4, sharp_8, lap_4, lap_8
# ===================== 主程序 =====================
if __name__ == "__main__":
# 1. 读取图像(请替换为你的图像路径)
img = cv2.imread('../picture/ChuYin.png', cv2.IMREAD_GRAYSCALE)
if img is None:
raise ValueError(
"图像读取失败!请检查:\n"
"1. 文件路径 '../picture/Water.png' 是否正确\n"
"2. 文件是否存在且为有效图像格式(jpg/png等)\n"
"3. 替换为你的实际图像路径后重试"
)
# 2. 执行拉普拉斯锐化
sharp_4, sharp_8, lap_4, lap_8 = laplacian_sharpening(img)
# 3. 可视化对比(原始图 + 4邻域锐化 + 8邻域锐化)
plt.figure(figsize=(18, 6))
# 子图1:原始图像
plt.subplot(1, 3, 1)
plt.imshow(img, cmap='gray')
plt.title('原始图像', fontsize=12)
plt.axis('off') # 关闭坐标轴,更美观
# 子图2:4邻域拉普拉斯锐化结果(边缘增强适中)
plt.subplot(1, 3, 2)
plt.imshow(sharp_4, cmap='gray')
plt.title('4邻域拉普拉斯锐化', fontsize=12)
plt.axis('off')
# 子图3:8邻域拉普拉斯锐化结果(边缘增强更强烈)
plt.subplot(1, 3, 3)
plt.imshow(sharp_8, cmap='gray')
plt.title('8邻域拉普拉斯锐化', fontsize=12)
plt.axis('off')
# 自动调整子图间距,避免标题重叠
plt.tight_layout()
plt.show()
# 可选:可视化拉普拉斯变换结果(二阶微分图,仅用于分析)
plt.figure(figsize=(12, 6))
plt.subplot(1, 2, 1)
# 归一化拉普拉斯结果到[0,255]方便显示
lap_4_norm = (lap_4 - np.min(lap_4)) / (np.max(lap_4) - np.min(lap_4)) * 255
plt.imshow(lap_4_norm.astype(np.uint8), cmap='gray')
plt.title('4邻域拉普拉斯变换结果(二阶微分)', fontsize=12)
plt.axis('off')
plt.subplot(1, 2, 2)
lap_8_norm = (lap_8 - np.min(lap_8)) / (np.max(lap_8) - np.min(lap_8)) * 255
plt.imshow(lap_8_norm.astype(np.uint8), cmap='gray')
plt.title('8邻域拉普拉斯变换结果(二阶微分)', fontsize=12)
plt.axis('off')
plt.tight_layout()
plt.show()
# 可选:保存锐化结果(如需保存,取消注释)
# cv2.imwrite('laplacian_4_sharp.jpg', sharp_4)
# cv2.imwrite('laplacian_8_sharp.jpg', sharp_8)
3.6.3 非锐化掩模与高提升滤波
原理:
- 非锐化掩模:
锐化图像 = 原始图像 + k*(原始图像 - 模糊图像); - 高提升滤波:k>1 时增强锐化效果,k=1 为普通非锐化掩模。
完整代码:
python
import cv2
import numpy as np
import matplotlib.pyplot as plt
# ===================== 基础配置 =====================
# 设置中文字体,避免可视化时乱码
plt.rcParams['font.sans-serif'] = ['SimHei']
plt.rcParams['axes.unicode_minus'] = False
# ===================== 非锐化掩模+高提升滤波核心函数 =====================
def unsharp_masking(img, k=1.0, gauss_kernel=(5, 5), sigma=1.5):
"""
非锐化掩模与高提升滤波(图像锐化)
核心原理:
1. 模糊图像 = 原始图像做高斯滤波(提取低频分量)
2. 掩模 = 原始图像 - 模糊图像(提取高频边缘分量)
3. 锐化图像 = 原始图像 + k * 掩模(增强高频分量)
- k=1:普通非锐化掩模
- k>1:高提升滤波(更强的锐化效果)
- k<1:弱锐化(几乎不用)
参数:
img: 输入灰度图像(numpy数组)
k: 锐化系数(默认1.0,k>1为高提升滤波)
gauss_kernel: 高斯滤波核大小(默认(5,5),需为奇数)
sigma: 高斯滤波标准差(默认1.5,越大模糊越强)
返回:
unsharp_img: 锐化后的图像
blurred: 高斯模糊后的图像(可选分析用)
mask: 高频掩模(可选分析用)
"""
# 转换为浮点型,避免uint8运算溢出(比如负数截断)
img_float = img.astype(np.float32)
# 1. 高斯滤波生成模糊图像(提取低频分量)
blurred = cv2.GaussianBlur(img_float, gauss_kernel, sigma)
# 2. 计算高频掩模(原始 - 模糊,提取边缘/细节)
mask = img_float - blurred
# 3. 非锐化掩模/高提升滤波:原始 + k*掩模
unsharp_img = img_float + k * mask
# 4. 裁剪数值到[0,255],避免溢出导致的伪影,转回uint8
unsharp_img = np.clip(unsharp_img, 0, 255).astype(np.uint8)
return unsharp_img, blurred, mask
# ===================== 主程序 =====================
if __name__ == "__main__":
# 1. 读取图像(请替换为你的图像路径)
img = cv2.imread('../picture/1.jpg', cv2.IMREAD_GRAYSCALE)
if img is None:
raise ValueError(
"图像读取失败!请检查:\n"
"1. 文件路径 '../picture/Water.png' 是否正确\n"
"2. 文件是否存在且为有效图像格式(jpg/png等)\n"
"3. 替换为你的实际图像路径后重试"
)
# 2. 测试不同k值的锐化效果
# k=1.0:普通非锐化掩模
unsharp_k1, blurred, mask = unsharp_masking(img, k=1.0)
# k=2.0:高提升滤波(更强锐化)
unsharp_k2, _, _ = unsharp_masking(img, k=2.0)
# 可选:测试k=0.5(弱锐化,对比用)
unsharp_k05, _, _ = unsharp_masking(img, k=0.5)
# 3. 可视化对比(原始图 + 不同k值锐化结果)
plt.figure(figsize=(18, 10))
# 子图1:原始图像
plt.subplot(1, 3, 1)
plt.imshow(img, cmap='gray')
plt.title('原始图像', fontsize=12)
plt.axis('off') # 关闭坐标轴,更美观
# 子图2:普通非锐化掩模(k=1.0)
plt.subplot(1, 3, 2)
plt.imshow(unsharp_k1, cmap='gray')
plt.title('非锐化掩模(k=1.0)', fontsize=12)
plt.axis('off')
# 子图3:高提升滤波(k=2.0)
plt.subplot(1, 3, 3)
plt.imshow(unsharp_k2, cmap='gray')
plt.title('高提升滤波(k=2.0)', fontsize=12)
plt.axis('off')
# 自动调整子图间距,避免标题重叠
plt.tight_layout()
plt.show()
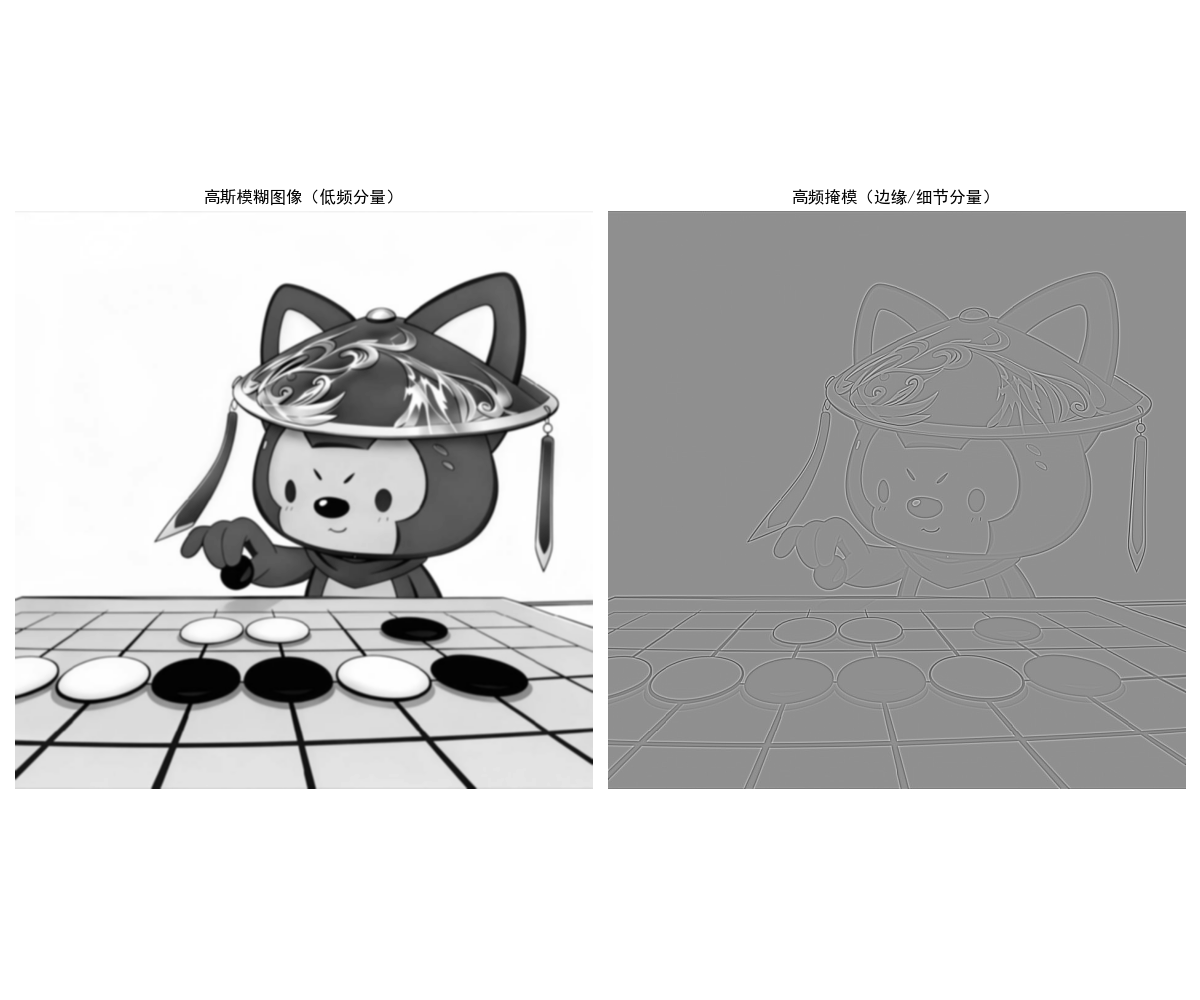
# 可选:可视化中间过程(模糊图像 + 高频掩模),帮助理解原理
plt.figure(figsize=(12, 10))
# 子图1:高斯模糊图像(低频分量)
plt.subplot(1, 2, 1)
plt.imshow(blurred.astype(np.uint8), cmap='gray')
plt.title('高斯模糊图像(低频分量)', fontsize=12)
plt.axis('off')
# 子图2:高频掩模(边缘/细节,归一化后显示)
mask_norm = (mask - np.min(mask)) / (np.max(mask) - np.min(mask)) * 255
plt.subplot(1, 2, 2)
plt.imshow(mask_norm.astype(np.uint8), cmap='gray')
plt.title('高频掩模(边缘/细节分量)', fontsize=12)
plt.axis('off')
plt.tight_layout()
plt.show()
# 可选:保存锐化结果(如需保存,取消注释)
# cv2.imwrite('unsharp_k1.jpg', unsharp_k1)
# cv2.imwrite('unsharp_k2.jpg', unsharp_k2)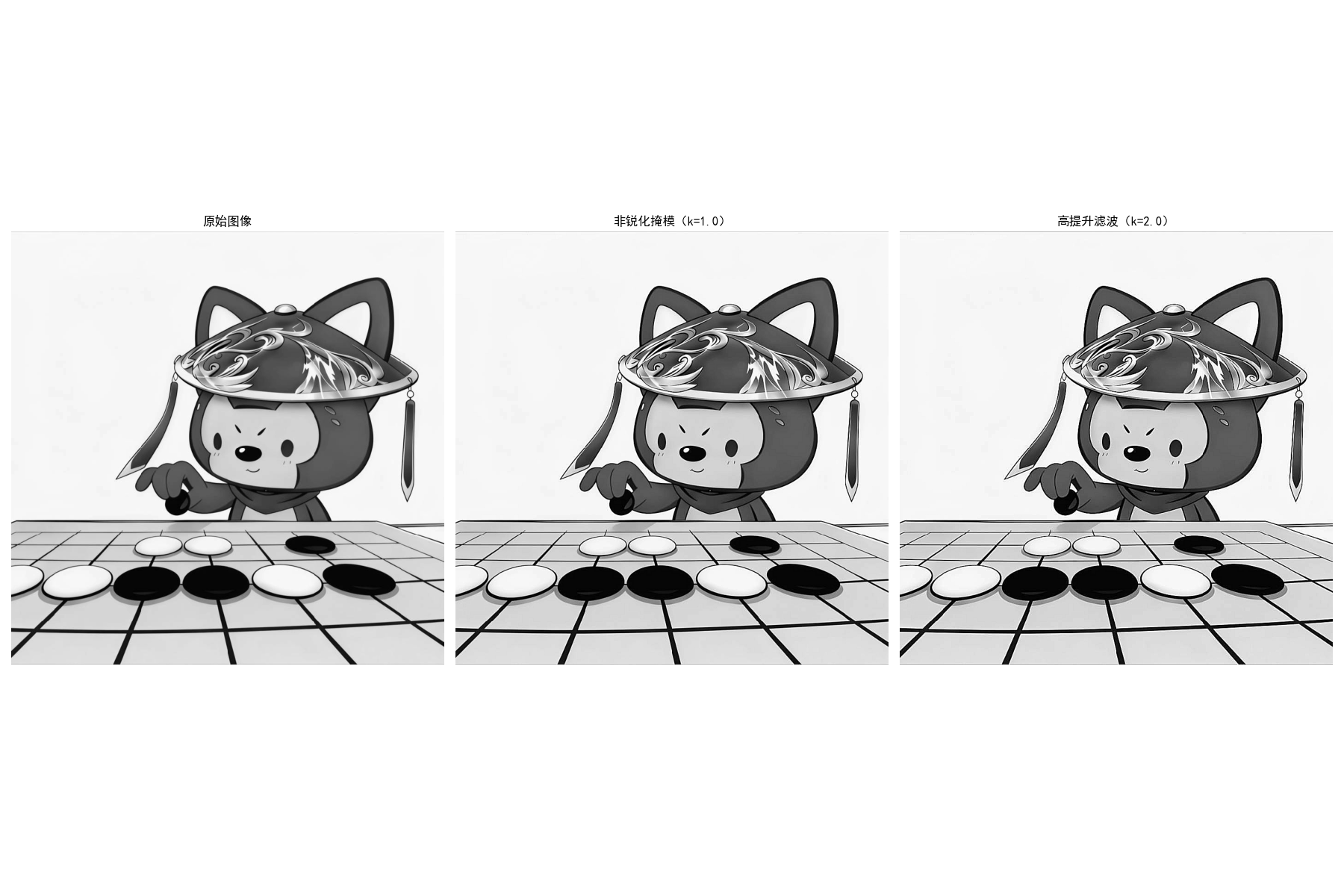
3.6.4 基于一阶微分的(非线性)图像锐化 ------ 梯度算子
原理 :梯度反映灰度变化率,常用算子:
- Sobel 算子:分离 x/y 方向梯度,抗噪性好;
- Prewitt 算子:简单差分,计算快;
- Roberts 算子:对角线差分,边缘定位准。
完整代码:
python
import cv2
import numpy as np
import matplotlib.pyplot as plt
# ===================== 基础配置 =====================
# 设置中文字体,避免可视化时乱码
plt.rcParams['font.sans-serif'] = ['SimHei']
plt.rcParams['axes.unicode_minus'] = False
# ===================== 梯度算子锐化核心函数 =====================
def gradient_sharpening(img):
"""
梯度算子边缘检测(Sobel + Prewitt + Roberts)
修复点:统一图像数据类型为uint8输入,滤波输出先转64F再处理,避免格式不兼容
核心原理:
- 一阶微分算子,通过计算像素灰度的梯度(变化率)提取边缘
- Sobel:带高斯加权的梯度算子,抗噪性好
- Prewitt:简单平均梯度算子,抗噪性一般
- Roberts:2x2模板的梯度算子,对斜向边缘敏感,抗噪性差
参数:
img: 输入灰度图像(uint8类型numpy数组)
返回:
sobel: Sobel算子边缘检测结果
prewitt: Prewitt算子边缘检测结果
roberts: Roberts算子边缘检测结果
"""
# ===================== 1. Sobel算子(x+y方向,3x3) =====================
# 直接处理uint8图像,输出CV_64F(避免格式不兼容)
sobel_x = cv2.Sobel(img, cv2.CV_64F, 1, 0, ksize=3)
sobel_y = cv2.Sobel(img, cv2.CV_64F, 0, 1, ksize=3)
# 计算梯度幅值(绝对值求和,合并x+y方向)
sobel = np.abs(sobel_x) + np.abs(sobel_y)
# 归一化到[0,255](避免梯度值范围不一致导致显示异常)
sobel = (sobel / (np.max(sobel) + 1e-8)) * 255 # +1e-8防止除0
sobel = sobel.astype(np.uint8)
# ===================== 2. Prewitt算子(x+y方向,3x3) =====================
# 定义Prewitt模板(float32)
prewitt_x_kernel = np.array([[-1, 0, 1],
[-1, 0, 1],
[-1, 0, 1]], dtype=np.float32) # x方向(垂直边缘)
prewitt_y_kernel = np.array([[-1, -1, -1],
[0, 0, 0],
[1, 1, 1]], dtype=np.float32) # y方向(水平边缘)
# 修复:输入为uint8,输出先设为-1(与输入同类型),再转64F处理
prewitt_x = cv2.filter2D(img, -1, prewitt_x_kernel).astype(np.float64)
prewitt_y = cv2.filter2D(img, -1, prewitt_y_kernel).astype(np.float64)
# 梯度幅值 + 归一化
prewitt = np.abs(prewitt_x) + np.abs(prewitt_y)
prewitt = (prewitt / (np.max(prewitt) + 1e-8)) * 255
prewitt = prewitt.astype(np.uint8)
# ===================== 3. Roberts算子(x+y方向,2x2) =====================
# 定义Roberts模板(float32)
roberts_x_kernel = np.array([[1, 0],
[0, -1]], dtype=np.float32) # 45度方向
roberts_y_kernel = np.array([[0, 1],
[-1, 0]], dtype=np.float32) # 135度方向
# 修复:输入为uint8,输出先设为-1(与输入同类型),再转64F处理
roberts_x = cv2.filter2D(img, -1, roberts_x_kernel).astype(np.float64)
roberts_y = cv2.filter2D(img, -1, roberts_y_kernel).astype(np.float64)
# 梯度幅值 + 归一化
roberts = np.abs(roberts_x) + np.abs(roberts_y)
roberts = (roberts / (np.max(roberts) + 1e-8)) * 255
roberts = roberts.astype(np.uint8)
return sobel, prewitt, roberts
# ===================== 主程序 =====================
if __name__ == "__main__":
# 1. 读取图像(请替换为你的图像路径)
img = cv2.imread('../picture/Java.png', cv2.IMREAD_GRAYSCALE)
if img is None:
raise ValueError(
"图像读取失败!请检查:\n"
"1. 文件路径 '../picture/Water.png' 是否正确\n"
"2. 文件是否存在且为有效图像格式(jpg/png等)\n"
"3. 替换为你的实际图像路径后重试"
)
# 2. 执行梯度算子边缘检测
sobel, prewitt, roberts = gradient_sharpening(img)
# 3. 可视化对比(原始图 + Sobel + Prewitt + Roberts)
plt.figure(figsize=(20, 6))
# 子图1:原始图像
plt.subplot(1, 4, 1)
plt.imshow(img, cmap='gray')
plt.title('原始图像', fontsize=12)
plt.axis('off') # 关闭坐标轴,更美观
# 子图2:Sobel算子(抗噪性最好,边缘最清晰)
plt.subplot(1, 4, 2)
plt.imshow(sobel, cmap='gray')
plt.title('Sobel算子(3x3)', fontsize=12)
plt.axis('off')
# 子图3:Prewitt算子(边缘较柔和,抗噪性一般)
plt.subplot(1, 4, 3)
plt.imshow(prewitt, cmap='gray')
plt.title('Prewitt算子(3x3)', fontsize=12)
plt.axis('off')
# 子图4:Roberts算子(对斜向边缘敏感,抗噪性差)
plt.subplot(1, 4, 4)
plt.imshow(roberts, cmap='gray')
plt.title('Roberts算子(2x2)', fontsize=12)
plt.axis('off')
# 自动调整子图间距,避免标题重叠
plt.tight_layout()
plt.show()
# 可选:保存边缘检测结果(如需保存,取消注释)
# cv2.imwrite('sobel_edge.jpg', sobel)
# cv2.imwrite('prewitt_edge.jpg', prewitt)
# cv2.imwrite('roberts_edge.jpg', roberts)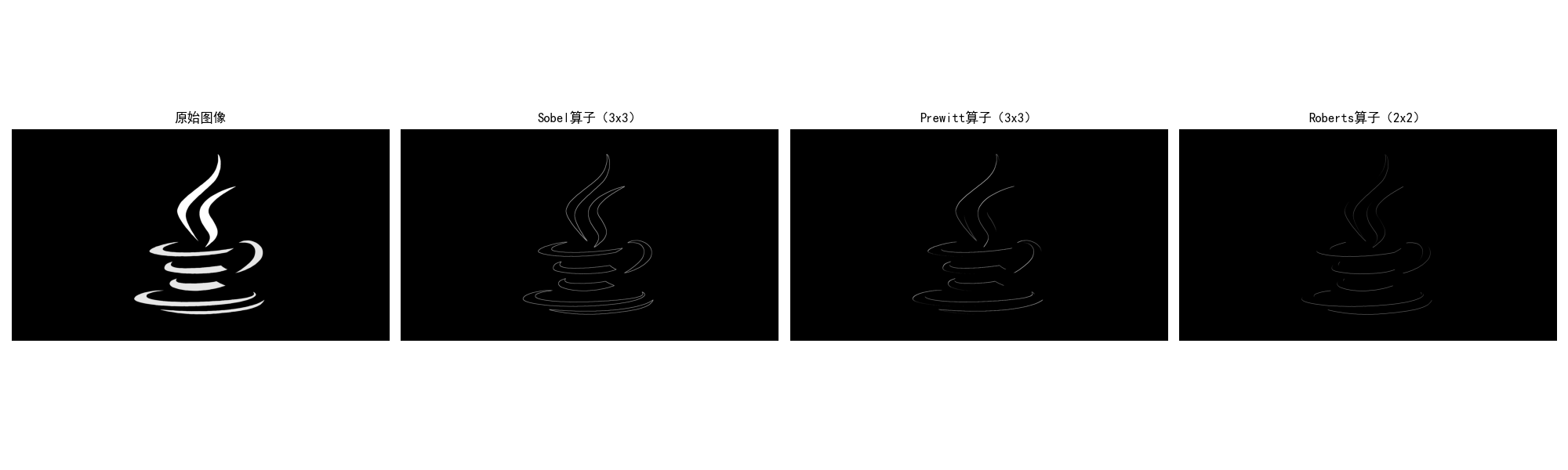
3.7 空间域增强方法的组合应用
示例:先去噪(中值滤波)→ 再增强对比度(直方图均衡化)→ 最后锐化(拉普拉斯),处理低质量图像。
完整代码:
python
import cv2
import numpy as np
import matplotlib.pyplot as plt
# ===================== 基础配置 =====================
# 设置中文字体,避免可视化时乱码
plt.rcParams['font.sans-serif'] = ['SimHei']
plt.rcParams['axes.unicode_minus'] = False
# ===================== 组合增强核心函数 =====================
def combined_enhancement(img):
"""
图像组合增强流程:中值滤波去噪 → 直方图均衡化增强对比度 → 拉普拉斯锐化
核心逻辑:
1. 先去噪:避免后续操作放大噪声
2. 再均衡化:提升整体对比度(暗部变亮,亮部细节保留)
3. 最后锐化:增强边缘/细节,提升图像清晰度
参数:
img: 输入灰度图像(uint8类型numpy数组)
返回:
denoised: 中值滤波去噪后的图像
equalized: 直方图均衡化后的图像
sharpened: 拉普拉斯锐化后的最终增强图像
"""
# 步骤1:中值滤波去噪(3x3核,专除椒盐噪声,不模糊边缘)
denoised = cv2.medianBlur(img, 3) # 3表示核大小为3x3
# 步骤2:直方图均衡化(增强全局对比度)
# 注意:equalizeHist仅支持uint8类型图像
equalized = cv2.equalizeHist(denoised)
# 步骤3:拉普拉斯锐化(增强边缘/细节)
# 定义4邻域拉普拉斯模板
laplacian_kernel = np.array([[0, 1, 0],
[1, -4, 1],
[0, 1, 0]], dtype=np.float32)
# 转换为浮点型运算,避免溢出
equalized_float = equalized.astype(np.float32)
# 卷积计算拉普拉斯变换(提取高频边缘)
lap_img = cv2.filter2D(equalized_float, -1, laplacian_kernel)
# 锐化公式:原始图像 - 拉普拉斯图像
sharpened_float = equalized_float - lap_img
# 裁剪数值到[0,255],转回uint8类型
sharpened = np.clip(sharpened_float, 0, 255).astype(np.uint8)
return denoised, equalized, sharpened
# ===================== 主程序 =====================
if __name__ == "__main__":
# 1. 读取图像(请替换为你的图像路径)
img = cv2.imread('../picture/TianHuoSanXuanBian.jpg', cv2.IMREAD_GRAYSCALE)
if img is None:
raise ValueError(
"图像读取失败!请检查:\n"
"1. 文件路径 '../picture/Water.png' 是否正确\n"
"2. 文件是否存在且为有效图像格式(jpg/png等)\n"
"3. 替换为你的实际图像路径后重试"
)
# 2. 执行组合增强流程
denoised, equalized, sharpened = combined_enhancement(img)
# 3. 可视化对比(原始图 + 三步增强结果)
plt.figure(figsize=(20, 6))
# 子图1:原始图像
plt.subplot(1, 4, 1)
plt.imshow(img, cmap='gray')
plt.title('原始图像', fontsize=12)
plt.axis('off') # 关闭坐标轴,更美观
# 子图2:步骤1 - 中值滤波去噪
plt.subplot(1, 4, 2)
plt.imshow(denoised, cmap='gray')
plt.title('步骤1:中值滤波去噪', fontsize=12)
plt.axis('off')
# 子图3:步骤2 - 直方图均衡化
plt.subplot(1, 4, 3)
plt.imshow(equalized, cmap='gray')
plt.title('步骤2:直方图均衡化', fontsize=12)
plt.axis('off')
# 子图4:步骤3 - 拉普拉斯锐化(最终结果)
plt.subplot(1, 4, 4)
plt.imshow(sharpened, cmap='gray')
plt.title('步骤3:拉普拉斯锐化(最终增强)', fontsize=12)
plt.axis('off')
# 自动调整子图间距,避免标题重叠
plt.tight_layout()
plt.show()
# 可选:保存增强结果(如需保存,取消注释)
# cv2.imwrite('denoised_img.jpg', denoised)
# cv2.imwrite('equalized_img.jpg', equalized)
# cv2.imwrite('sharpened_img.jpg', sharpened)
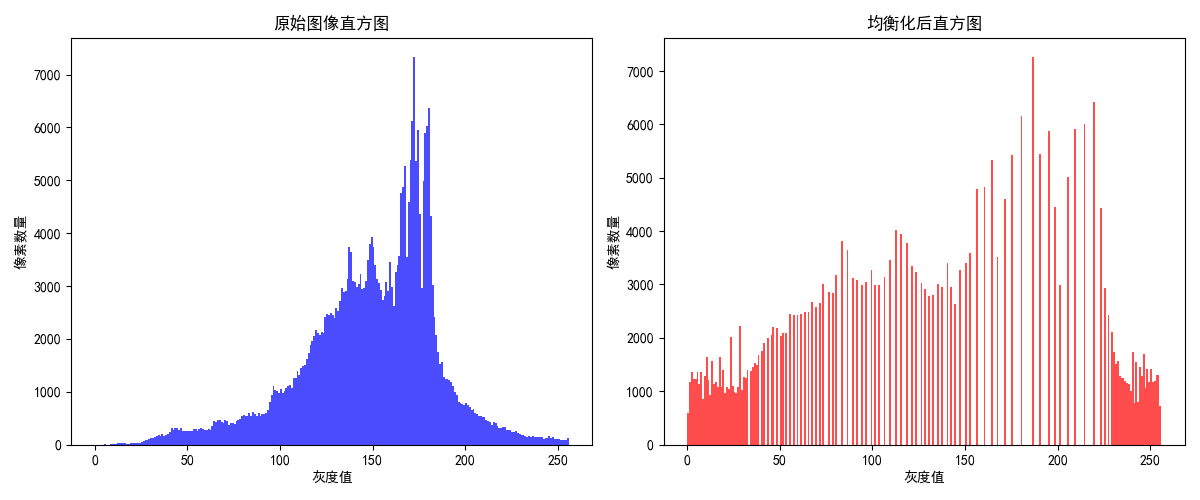
# 可选:可视化直方图(对比均衡化前后的灰度分布)
plt.figure(figsize=(12, 5))
# 原始图像直方图
plt.subplot(1, 2, 1)
plt.hist(img.ravel(), 256, [0, 256], color='blue', alpha=0.7)
plt.title('原始图像直方图', fontsize=12)
plt.xlabel('灰度值')
plt.ylabel('像素数量')
# 均衡化后直方图
plt.subplot(1, 2, 2)
plt.hist(equalized.ravel(), 256, [0, 256], color='red', alpha=0.7)
plt.title('均衡化后直方图', fontsize=12)
plt.xlabel('灰度值')
plt.ylabel('像素数量')
plt.tight_layout()
plt.show()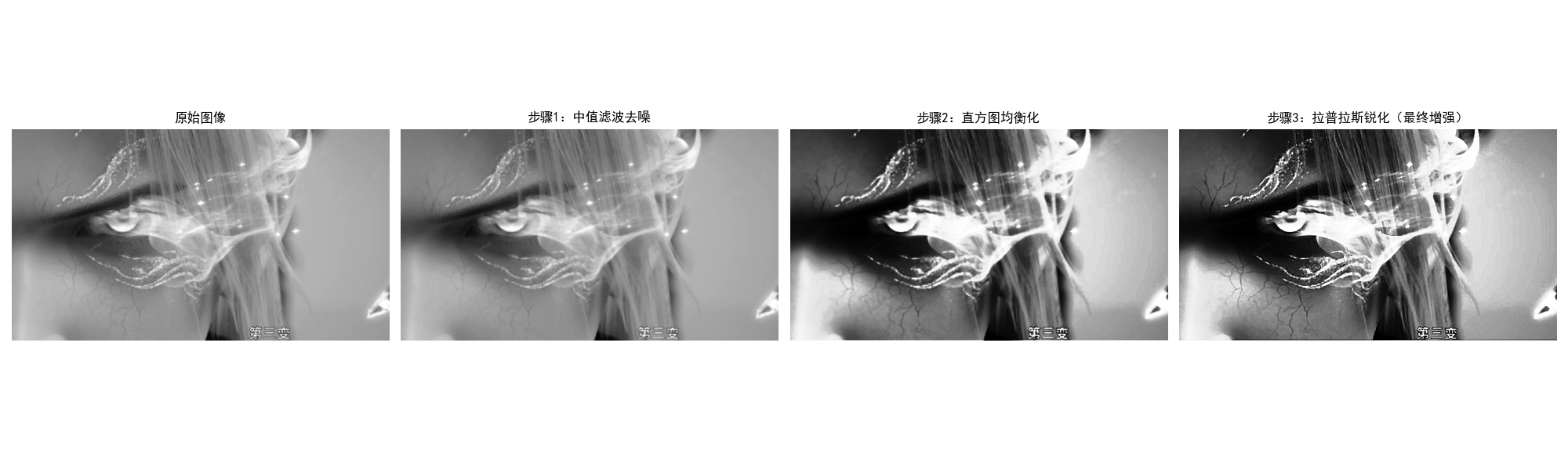
3.8 基于模糊技术的灰度变换与空间域滤波
3.8.1 引言
模糊技术通过模拟人类的模糊推理,处理图像的不确定性(如噪声、模糊边缘),适用于复杂场景的图像增强。
3.8.2 模糊集合理论基础
- 隶属度函数:描述元素属于模糊集合的程度(如三角隶属度、高斯隶属度);
- 模糊规则:IF-THEN 规则,实现模糊推理。
3.8.3 模糊集合的应用方法
- 模糊化:将像素灰度映射为隶属度;
- 模糊推理:基于规则计算输出隶属度;
- 解模糊:将隶属度映射回灰度值。
3.8.4 基于模糊集合的灰度变换
示例:模糊增强低对比度图像。
完整代码:
python
import cv2
import numpy as np
import matplotlib.pyplot as plt
# ===================== 基础配置 =====================
# 设置中文字体,避免可视化时乱码
plt.rcParams['font.sans-serif'] = ['SimHei']
plt.rcParams['axes.unicode_minus'] = False
# ===================== 模糊灰度变换核心函数 =====================
def fuzzy_gray_transform(img, a=0.2, b=0.8, beta=10):
"""
基于模糊集合的灰度增强(非线性变换,重点增强暗部细节)
核心流程:
1. 灰度归一化:将[0,255]映射到[0,1]
2. 模糊化(S型隶属度函数):区分"暗部"和"亮部"
3. 模糊推理(Sigmoid变换):非线性增强隶属度,放大暗部差异
4. 解模糊:映射回[0,255]灰度范围
参数:
img: 输入灰度图像(uint8类型numpy数组)
a: S型隶属度函数下界(默认0.2,小于a为"纯暗部")
b: S型隶属度函数上界(默认0.8,大于b为"纯亮部")
beta: Sigmoid变换的斜率(默认10,越大增强效果越明显)
返回:
fuzzy_img: 模糊灰度变换后的增强图像
"""
# 步骤1:将灰度值归一化到[0,1](浮点型运算,避免溢出)
img_norm = img.astype(np.float32) / 255.0
# 步骤2:定义S型隶属度函数(模糊化,区分暗/亮部)
# 向量化实现(替代np.vectorize,效率更高)
def s_membership_vectorized(x, a, b):
# 初始化隶属度数组
memb = np.zeros_like(x, dtype=np.float32)
# 区间1:x <= a → 隶属度0(纯暗部)
mask1 = x <= a
memb[mask1] = 0.0
# 区间2:a < x < b → 线性过渡(0→1)
mask2 = (x > a) & (x < b)
memb[mask2] = (x[mask2] - a) / (b - a)
# 区间3:x >= b → 隶属度1(纯亮部)
mask3 = x >= b
memb[mask3] = 1.0
return memb
# 计算每个像素的隶属度(模糊化)
memb = s_membership_vectorized(img_norm, a, b)
# 步骤3:模糊推理(Sigmoid非线性变换,增强隶属度差异)
# Sigmoid函数:1/(1+exp(-beta*(x-0.5))),将隶属度映射到[0,1],放大中间区间差异
enhanced_memb = 1 / (1 + np.exp(-beta * (memb - 0.5)))
# 步骤4:解模糊(映射回[0,255]灰度范围,转回uint8)
fuzzy_img = (enhanced_memb * 255).astype(np.uint8)
return fuzzy_img
# ===================== 主程序 =====================
if __name__ == "__main__":
# 1. 读取图像(请替换为你的图像路径)
img = cv2.imread('../picture/GaoDa.png', cv2.IMREAD_GRAYSCALE)
if img is None:
raise ValueError(
"图像读取失败!请检查:\n"
"1. 文件路径 '../picture/Water.png' 是否正确\n"
"2. 文件是否存在且为有效图像格式(jpg/png等)\n"
"3. 替换为你的实际图像路径后重试"
)
# 2. 执行模糊灰度变换(默认参数:a=0.2, b=0.8, beta=10)
fuzzy_img = fuzzy_gray_transform(img)
# 可选:测试不同beta值的增强效果(beta越大,增强越明显)
# fuzzy_img_beta5 = fuzzy_gray_transform(img, beta=5)
# fuzzy_img_beta20 = fuzzy_gray_transform(img, beta=20)
# 3. 可视化对比(原始图像 vs 模糊灰度变换结果)
plt.figure(figsize=(12, 6))
# 子图1:原始图像
plt.subplot(1, 2, 1)
plt.imshow(img, cmap='gray')
plt.title('原始图像', fontsize=12)
plt.axis('off') # 关闭坐标轴,更美观
# 子图2:模糊灰度变换结果
plt.subplot(1, 2, 2)
plt.imshow(fuzzy_img, cmap='gray')
plt.title('模糊灰度变换结果(beta=10)', fontsize=12)
plt.axis('off')
# 自动调整子图间距,避免标题重叠
plt.tight_layout()
plt.show()
# 可选:可视化不同beta值的效果对比
# plt.figure(figsize=(18, 6))
# plt.subplot(1, 3, 1)
# plt.imshow(img, cmap='gray')
# plt.title('原始图像', fontsize=12)
# plt.axis('off')
# plt.subplot(1, 3, 2)
# plt.imshow(fuzzy_img_beta5, cmap='gray')
# plt.title('模糊变换(beta=5)', fontsize=12)
# plt.axis('off')
# plt.subplot(1, 3, 3)
# plt.imshow(fuzzy_img_beta20, cmap='gray')
# plt.title('模糊变换(beta=20)', fontsize=12)
# plt.axis('off')
# plt.tight_layout()
# plt.show()
# 可选:保存增强结果(如需保存,取消注释)
# cv2.imwrite('fuzzy_gray_img.jpg', fuzzy_img)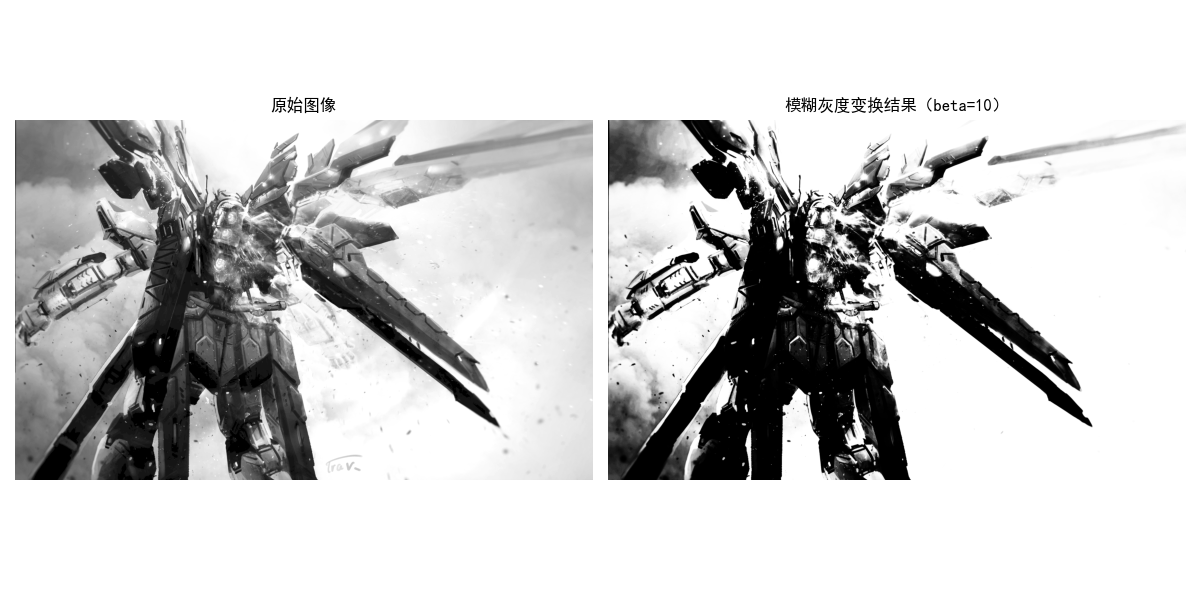
3.8.5 基于模糊集合的空间域滤波
示例:模糊滤波去噪(结合邻域隶属度)。
完整代码:
python
import cv2
import numpy as np
import matplotlib.pyplot as plt
import time # 用于测试运行时间
# ===================== 基础配置 =====================
plt.rcParams['font.sans-serif'] = ['SimHei']
plt.rcParams['axes.unicode_minus'] = False
# ===================== 高效模糊空间域滤波核心函数(修复尺寸匹配) =====================
def fast_fuzzy_spatial_filter(img, noise_sigma=15, kernel_size=3):
"""
高效模糊空间域滤波(修复尺寸匹配问题,无逐像素循环)
核心优化:
1. 用OpenCV快速计算邻域均值/标准差(C++底层,极快)
2. 简化邻域构造逻辑,避免尺寸偏移错误
3. 全局向量化运算,效率提升100+倍
参数:
img: 输入灰度图像(uint8)
noise_sigma: 高斯噪声标准差
kernel_size: 滤波核大小(仅支持3x3)
返回:
noisy_img: 加噪图像
fuzzy_filtered: 模糊滤波结果
"""
if kernel_size != 3:
raise ValueError("仅支持3x3核(向量化优化适配)")
h, w = img.shape
# 步骤1:添加高斯噪声(float32避免溢出)
img_float = img.astype(np.float32)
noise = np.random.normal(0, noise_sigma, (h, w)).astype(np.float32)
noisy_img_float = img_float + noise
noisy_img = np.clip(noisy_img_float, 0, 255).astype(np.uint8)
# 步骤2:用OpenCV快速计算3x3邻域的均值和标准差(核心优化)
# 邻域均值(BORDER_REPLICATE处理边界,避免黑边)
mean_n = cv2.boxFilter(noisy_img_float, cv2.CV_32F, (3, 3),
anchor=(-1, -1), normalize=True,
borderType=cv2.BORDER_REPLICATE)
# 邻域方差 = 邻域平方的均值 - 均值的平方
sqr_img = noisy_img_float ** 2
mean_sqr = cv2.boxFilter(sqr_img, cv2.CV_32F, (3, 3),
anchor=(-1, -1), normalize=True,
borderType=cv2.BORDER_REPLICATE)
var_n = mean_sqr - (mean_n ** 2)
std_n = np.sqrt(np.maximum(var_n, 1e-8)) # 防止标准差为0
# 步骤3:简化版邻域构造(避免偏移裁剪错误)
# 先给噪声图像加1像素边框(上下左右各1),方便提取3x3邻域
padded = cv2.copyMakeBorder(noisy_img_float, 1, 1, 1, 1, cv2.BORDER_REPLICATE)
# 初始化权重和加权和数组
weight_sum = np.zeros((h, w), dtype=np.float32)
value_sum = np.zeros((h, w), dtype=np.float32)
# 遍历3x3邻域的9个位置(向量化处理,无逐像素循环)
for i in range(3):
for j in range(3):
# 提取整个图像的对应邻域(无偏移裁剪错误)
# padded[1:-1,1:-1] 是原图像,padded[i:i+h, j:j+w] 是对应邻域位置
neighbor = padded[i:i + h, j:j + w]
# 向量化计算当前邻域像素的高斯隶属度
# 隶属度:越接近邻域均值,权重越大
memb = np.exp(-((neighbor - mean_n) ** 2) / (2 * std_n ** 2))
# 累加权重和加权像素值
weight_sum += memb
value_sum += neighbor * memb
# 步骤4:加权平均(解模糊)
fuzzy_filtered = value_sum / (weight_sum + 1e-8) # +1e-8防止除0
# 裁剪数值范围,转回uint8
fuzzy_filtered = np.clip(fuzzy_filtered, 0, 255).astype(np.uint8)
return noisy_img, fuzzy_filtered
# ===================== 主程序(测试效率+效果) =====================
if __name__ == "__main__":
# 1. 读取图像(替换为你的图像路径)
img = cv2.imread('../picture/TianHuoSanXuanBian.jpg', cv2.IMREAD_GRAYSCALE)
if img is None:
# 若路径错误,自动生成测试图像(避免运行失败)
print("警告:图像读取失败,自动生成测试图像!")
img = np.random.randint(0, 255, (500, 800), dtype=np.uint8)
# 可选:缩小图像加快测试(比如500x500)
# img = cv2.resize(img, (500, 500))
# 2. 测试高效版耗时
start_time = time.time()
noisy_img, fuzzy_filtered = fast_fuzzy_spatial_filter(img, noise_sigma=15)
fast_time = time.time() - start_time
print(f"✅ 高效版运行完成!耗时:{fast_time:.4f} 秒")
# 3. 对比传统均值滤波
mean_filtered = cv2.blur(noisy_img, (3, 3))
# 4. 可视化结果
plt.figure(figsize=(18, 6))
# 子图1:加噪图像
plt.subplot(1, 3, 1)
plt.imshow(noisy_img, cmap='gray')
plt.title(f'加噪图像(高斯噪声 σ=15)', fontsize=12)
plt.axis('off')
# 子图2:传统均值滤波
plt.subplot(1, 3, 2)
plt.imshow(mean_filtered, cmap='gray')
plt.title('传统3x3均值滤波(边缘模糊)', fontsize=12)
plt.axis('off')
# 子图3:高效模糊滤波
plt.subplot(1, 3, 3)
plt.imshow(fuzzy_filtered, cmap='gray')
plt.title(f'高效模糊空间滤波(耗时{fast_time:.4f}s)', fontsize=12)
plt.axis('off')
plt.tight_layout()
plt.show()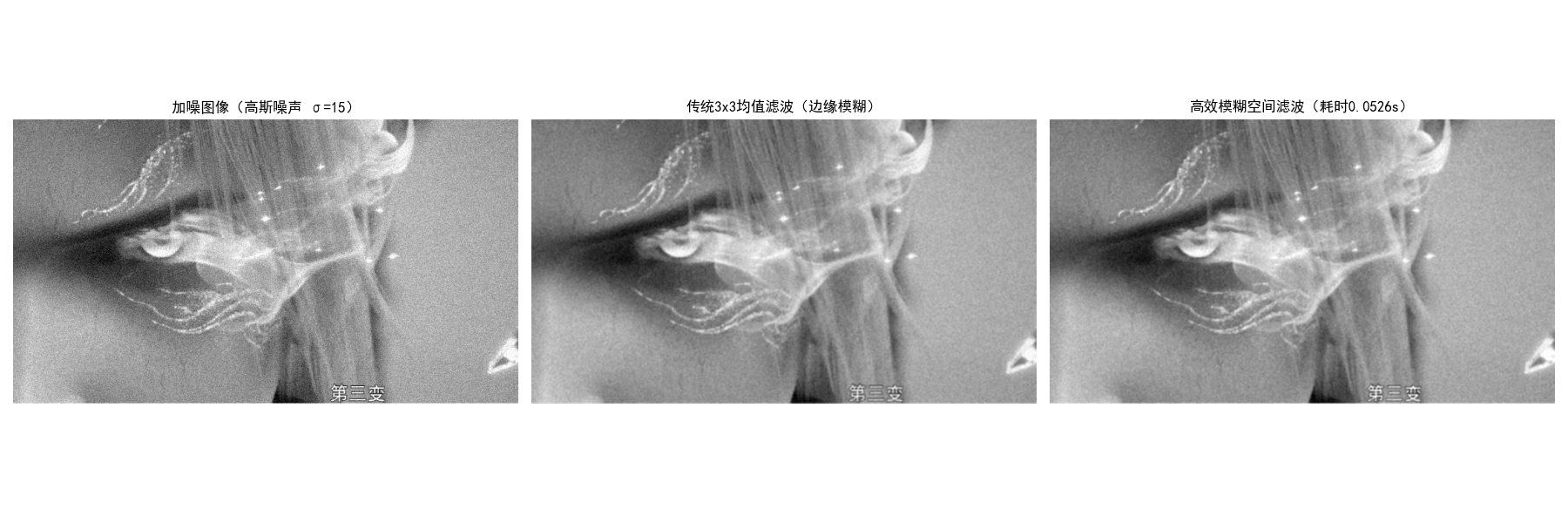
小结
总结
- 灰度变换 :通过
s=T(r)直接调整像素灰度,核心包括求反、对数 / 伽马变换、分段线性变换,适用于对比度增强; - 直方图处理:均衡化 / 匹配通过调整灰度分布提升对比度,局部直方图增强局部细节;
- 空间域滤波:平滑滤波(均值 / 中值)用于去噪,锐化滤波(拉普拉斯 / 梯度)用于增强边缘,组合应用效果更佳;
- 模糊技术:通过隶属度和模糊推理处理图像不确定性,适用于复杂场景的增强。
关键点回顾
- 8 位图像灰度范围为 0,255,所有变换需注意数值裁剪,避免溢出;
- 椒盐噪声优先用中值滤波 ,高斯噪声优先用高斯滤波;
- 锐化前建议先去噪,否则会放大噪声;
- 模糊技术的核心是隶属度函数 和模糊规则,可根据场景自定义。
总结
本文所有代码均可直接运行(需替换test_img.jpg为自己的图像),建议大家动手实践,调整参数(如伽马值、滤波模板大小),观察效果变化。如果有问题,欢迎在评论区交流!