目录
1.摘要
面向多无人机协同攻击多目标任务,本文提出一种用于任务分配---路径规划一体化求解的改进遗传算法。针对更真实的任务需求,模型纳入资源约束与多目标同步到达等条件,并通过定制交叉与变异算子确保解始终满足约束。同时引入解锁机制,避免无人机陷入无限等待导致的染色体死锁。仿真与蒙特卡洛结果表明,该方法能够稳定产生可行且高质量的协同方案,整体性能优于传统方法。
2.问题描述
本文以异构固定翼无人机协同打击多地面目标为背景,将任务分配与航迹规划耦合建模为组合优化问题,并考虑目标资源需求导致的多机联盟攻击。无人机载荷用资源向量描述,目标需求与价值采用资源约束及时间衰减收益建模。为降低计算复杂度,采用航向角离散化并构建有向图,将分配关系+可行路径统一表示,实现一体化任务规划。
论文将多无人机协同打击建模为有向图上的组合优化问题,实现任务分配与航迹规划一体化求解。目标函数同时考虑所有无人机累计飞行距离与单架无人机的最大飞行距离:
min J = ∑ h = 1 N u ( ∑ i = 1 ∣ V a l l ∣ ∑ j = 1 ∣ V T ∣ x U h ( v i , v j ) w U h ( v i , v j ) ) + α ⋅ max U h ( ∑ i = 1 ∣ V a l l ∣ ∑ j = 1 ∣ V T ∣ x U h ( v i , v j ) w U h ( v i , v j ) ) \min J=\sum_{h=1}^{N_u}\left(\sum_{i=1}^{|V_{all}|}\sum_{j=1}^{|V_T|}x_{U_h}(v_i,v_j)w_{U_h}(v_i,v_j)\right)+\alpha\cdot\max_{U_h}\left(\sum_{i=1}^{|V_{all}|}\sum_{j=1}^{|V_T|}x_{U_h}(v_i,v_j)w_{U_h}(v_i,v_j)\right) minJ=h=1∑Nu i=1∑∣Vall∣j=1∑∣VT∣xUh(vi,vj)wUh(vi,vj) +α⋅Uhmax i=1∑∣Vall∣j=1∑∣VT∣xUh(vi,vj)wUh(vi,vj)
3.多无人机任务分配的改进遗传算法
编码方案
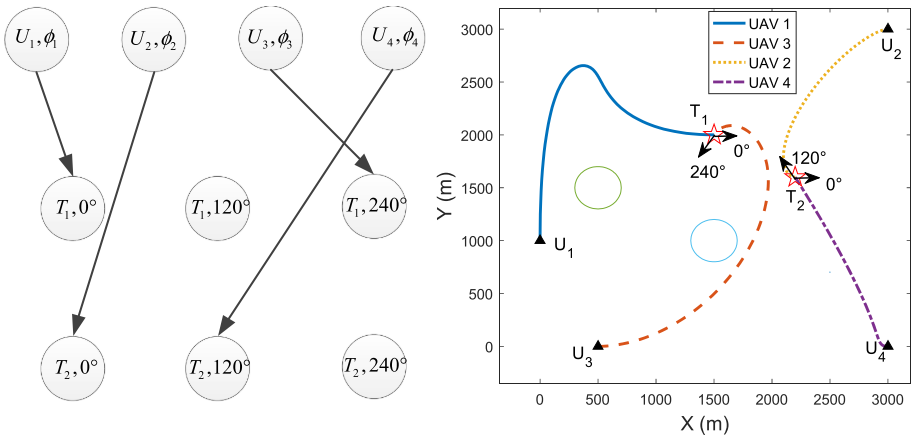
论文提出一种面向一体化任务分配与航迹规划的矩阵式染色体编码:每列为基因,表示某无人机以离散航向角攻击某目标,基因数由各目标最大可分配无人机数 N j T N_j^T NjT决定,总数为
∑ N j T \sum N_j^T ∑NjT。基因包含分配信息+航向角编号(未分配用0表示)。同时可按目标/按无人机重
组为两类子染色体,分别刻画同步攻击的联盟分配与单机任务序列。
初始化和适应度计算
初始化时对每个目标生成若干基因: 第一行固定为目标编号,第二行随机分配无人机编号(可为0表示未分配),第三行随机生成离散到达航向角。适应度定义为 f = 1 / J f=1/J f=1/J ,与目标函数成反比,其中 J J J由PH曲线路径长度等边权累加得到。若目标需多机协同攻击,则采用同步到达路径规划方法生成等长航迹并避障。最后通过轮盘赌策略选择父代生成子代。
遗传算子
交叉采用单点交叉:随机选取交叉位置,将前段基因直接继承,后段基因从另一亲代中抽取,但需通过补集筛选避免同一目标分配无人机超限,确保满足单目标最大分配约束。变异用于增强多样性、防止陷入局部最优,包含两种方式:航向角变异,随机替换基因的到达航向角,从而改变协同航迹;分配变异,对某目标基因随机更换攻击无人机(从可替换集合中选取),以调整任务分配结构。
解锁
针对多无人机协同任务中易出现的死锁问题提出新的染色体解锁策略,本文基于战场态势感知计算每个目标的期望效用并按效用降序确定统一的目标执行序列。各无人机的任务顺序不再由基因排列决定,而由全局目标序列驱动,从而在生成的任务依赖图中避免出现有向环,彻底消除互相等待导致的死锁风险。
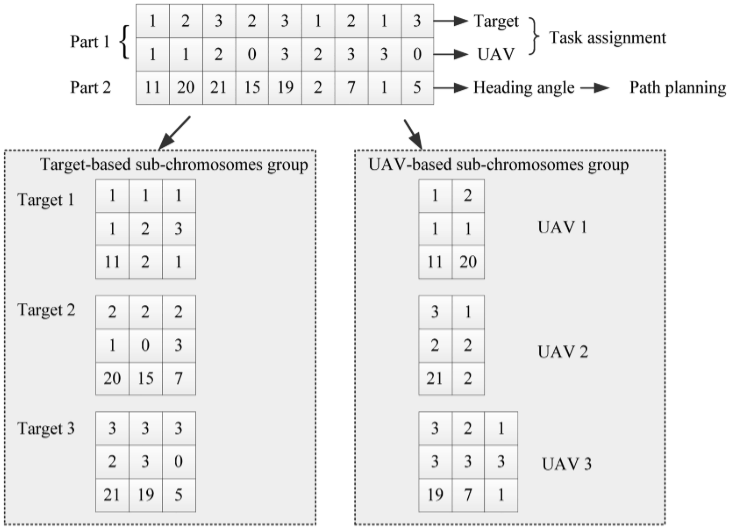
4.结果展示
5.参考文献
1 Yan F, Chu J, Hu J, et al. Cooperative task allocation with simultaneous arrival and resource constraint for multi-UAV using a genetic algorithmJ. Expert Systems with Applications, 2024, 245: 123023.
6.代码获取
xx
7.算法辅导·应用定制·读者交流
xx