题目描述
给定一个二叉树的 根节点 root,请找出该二叉树的 最底层 最左边节点的值。
假设二叉树中至少有一个节点。
示例 1:
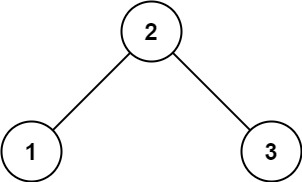
输入: root = [2,1,3]
输出: 1示例 2:
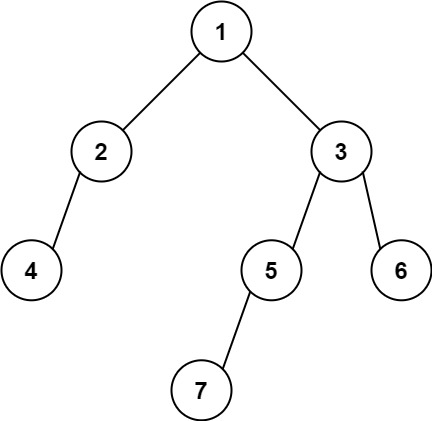
输入: [1,2,3,4,null,5,6,null,null,7]
输出: 7提示:
- 二叉树的节点个数的范围是
[1,104] -231 <= Node.val <= 231 - 1
解决方案:
这段代码的核心功能是找到二叉树最底层最左侧的节点值 ,采用「层序遍历(BFS)+ 优先入队右子节点」的技巧实现,时间复杂度 O(n)(n 为节点数),空间复杂度 O(n)(队列存储节点开销),是该问题的简洁高效解法。
核心逻辑
代码利用队列实现层序遍历,但通过调整子节点入队顺序(先右后左),让最后遍历到的节点恰好是 "最底层最左侧" 的节点,无需记录层数:
- 初始化 :
- 用双端队列
deq存储待遍历节点,初始加入根节点; - 用
ans记录结果,初始化为根节点值(兜底空树 / 单节点场景);
- 用双端队列
- 层序遍历循环 :只要队列非空,持续遍历:
- 取出队列头部节点
node,并更新ans为该节点的值; - 核心技巧:先将右子节点入队,再将左子节点入队(改变常规的 "先左后右" 顺序);
- 取出队列头部节点
- 返回结果 :遍历结束时,
ans最后一次更新的值就是 "最底层最左侧" 节点的值(因为先遍历右节点,最后遍历到的必然是最底层最左节点)。
总结
- 核心思路:通过「先右后左」的入队顺序,让层序遍历的最后一个节点就是 "最底层最左侧" 节点,无需统计层数或记录每一层的第一个节点;
- 关键细节:队列遍历采用 "取头→更新结果→右子入队→左子入队" 的顺序,保证遍历到最底层时,最后一个节点是最左侧的;
- 效率特点:每个节点仅入队 / 出队一次,时间
O(n);队列空间开销取决于树的宽度(最坏为最后一层节点数),是该问题的最优解法之一。
函数源码:
cpp/** * Definition for a binary tree node. * struct TreeNode { * int val; * TreeNode *left; * TreeNode *right; * TreeNode() : val(0), left(nullptr), right(nullptr) {} * TreeNode(int x) : val(x), left(nullptr), right(nullptr) {} * TreeNode(int x, TreeNode *left, TreeNode *right) : val(x), left(left), right(right) {} * }; */ class Solution { public: int findBottomLeftValue(TreeNode* root) { deque<TreeNode*> deq={root}; int ans=root->val; while(!deq.empty()){ TreeNode* node=deq.front(); deq.pop_front(); ans=node->val; if(node->right){ deq.push_back(node->right); } if(node->left){ deq.push_back(node->left); } } return ans; } };