正规方程法的矩阵形式
核心问题 :必须计算  ,而这个矩阵可能不可逆!
,而这个矩阵可能不可逆!
这里的  就是矩阵 X 的 Moore-Penrose 伪逆 (Moore-Penrose pseudoinverse),记作
就是矩阵 X 的 Moore-Penrose 伪逆 (Moore-Penrose pseudoinverse),记作 。
。
所以严格来说:
- 当
 可逆时,
可逆时, ,就是普通逆
,就是普通逆 - 当
 不可逆或病态 时(特征共线、n > m 等),这个公式仍然成立,但它求的是伪逆,而不是真逆
不可逆或病态 时(特征共线、n > m 等),这个公式仍然成立,但它求的是伪逆,而不是真逆
sklearn 的 LinearRegression 底层用 scipy.linalg.lstsq,它本质上就是在求最小二乘解,而最小二乘解的表达式就是:
当局矩阵不可逆时,可以通过QR 分解和 SVD 分解来算伪逆。
1.QR 分解数学计算流程
问题:将矩阵A分解为Q(正交矩阵)和R(上三角矩阵)
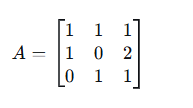
设矩阵 A:
计算步骤(Gram-Schmidt正交化):
步骤1:初始化

步骤2:第一个正交向量

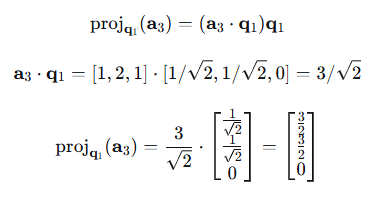
步骤3:第二个正交向量
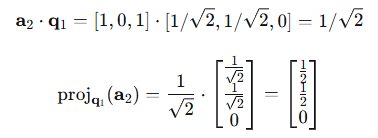
1、计算投影:
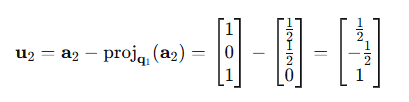
2、计算正交分量:
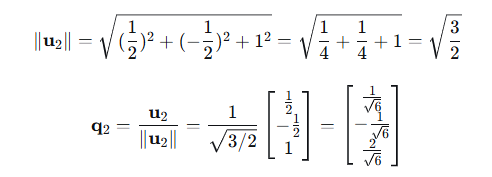
3、单位化:
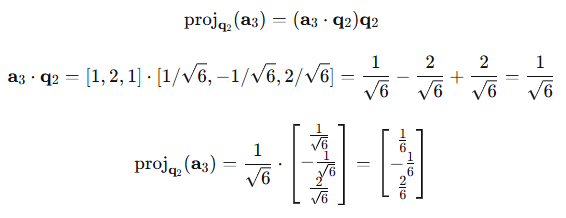
步骤4:第三个正交向量
1、计算投影:
2、投影到q2:
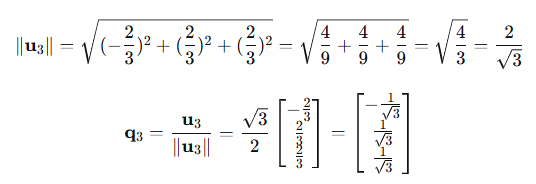
3、计算正交分量:

4、单位化:
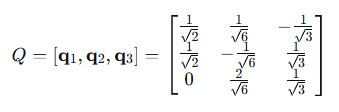
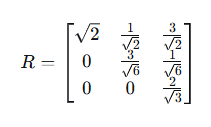
步骤5:构建Q和R
R是上三角矩阵:
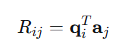
计算:
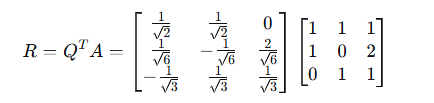
逐元素计算:
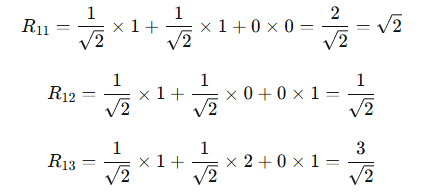
继续计算第二行:
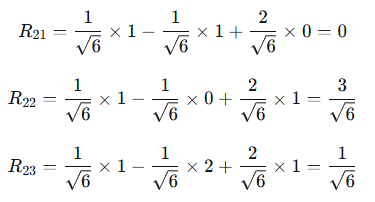
第三行:
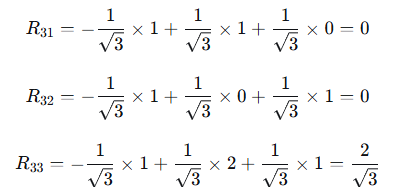
所以:
2. SVD分解计算示例
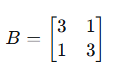
问题:将矩阵B分解为
设更简单的矩阵 B:
计算步骤:
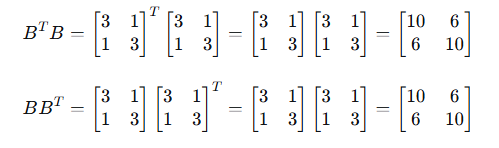
步骤1:计算  和
和 
步骤2:求 的特征值和特征向量
特征方程:
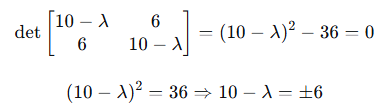
特征值:
奇异值:

特征向量:
对于 :
:

方程:
单位化: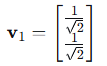
对于  :
:
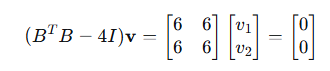
方程:
单位化: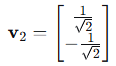
所以: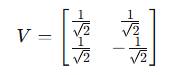
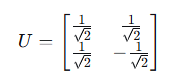
步骤3:计算U矩阵
有两种方法:
-
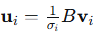
-
或从
的特征向量(这里  ,所以U=V)
,所以U=V)
用方法1计算:
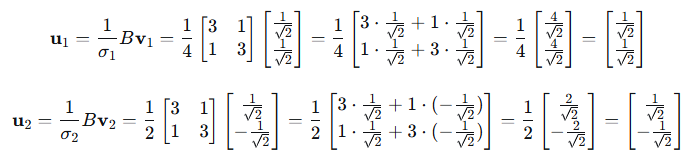
所以:
步骤4:构建Σ矩阵
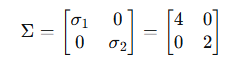
步骤5:最终SVD分解

QR分解最终的R和SVD分解最终的B, 直接等于伪逆。
代码正规方程法矩阵不可逆
python
import numpy as np
import pandas as pd
from sklearn.linear_model import LinearRegression
import warnings
# 抑制警告
warnings.filterwarnings('ignore')
print("=" * 60)
print("示例1: 完美线性相关(多重共线性)")
print("=" * 60)
# 创建一个有完美多重共线性的矩阵
np.random.seed(42)
n_samples = 100
# 特征1:随机数据
x1 = np.random.randn(n_samples)
# 特征2:与特征1完全相关(线性组合)
x2 = 2 * x1 + 3 # x2 = 2*x1 + 3
# 特征3:与特征1也相关
x3 = 0.5 * x1 - 1
# 目标变量
y = 3 * x1 + 2 * x2 - 1.5 * x3 + np.random.randn(n_samples) * 0.1
# 构建特征矩阵
X = np.column_stack([x1, x2, x3])
print("特征矩阵 X 的形状:", X.shape)
print("\n特征相关性分析:")
print("x2 = 2*x1 + 3 (完美线性相关)")
print("x3 = 0.5*x1 - 1 (完美线性相关)")
print("所以 X^T*X 是奇异矩阵(不可逆)")
# 计算 X^T*X 的秩和行列式
XTX = X.T @ X
rank = np.linalg.matrix_rank(XTX)
det = np.linalg.det(XTX)
print(f"\nX^T*X 的秩: {rank} (小于特征数3 → 不可逆)")
print(f"X^T*X 的行列式: {det:.10f} (接近0)")
print(f"X^T*X 的条件数: {np.linalg.cond(XTX):.2e} (非常大)")
# 尝试直接计算正规方程解
try:
w_direct = np.linalg.inv(XTX) @ X.T @ y
print("\n直接求逆成功(数值不稳定)")
print("直接求逆的权重:", w_direct)
except np.linalg.LinAlgError as e:
print(f"\n直接求逆失败: {e}")
print("\n" + "-" * 60)
print("使用 sklearn LinearRegression:")
print("-" * 60)
# 使用sklearn
model = LinearRegression()
model.fit(X, y)
print("拟合成功!sklearn没有报错")
print(f"系数: {model.coef_}")
print(f"截距: {model.intercept_:.6f}")
# 验证预测效果
y_pred = model.predict(X)
mse = np.mean((y_pred - y) ** 2)
print(f"均方误差 (MSE): {mse:.10f}")
# 检查解的质量
print(f"\n验证 X @ w ≈ y:")
print(f"X @ w 的前5个值: {(X @ model.coef_ + model.intercept_)[:5]}")
print(f"y 的前5个值: {y[:5]}")
print("\n" + "=" * 60)
print("内部原理分析:sklearn使用了伪逆")
print("=" * 60)
# 手动计算伪逆解
X_with_bias = np.column_stack([np.ones(n_samples), X]) # 添加截距项
w_pinv = np.linalg.pinv(X_with_bias) @ y
print("手动伪逆解(包含截距):")
print(f"截距: {w_pinv[0]:.6f}")
print(f"系数: {w_pinv[1:]}")
print("\n与sklearn结果比较:")
print(f"截距差异: {abs(model.intercept_ - w_pinv[0]):.10f}")
print(f"系数差异: {np.max(np.abs(model.coef_ - w_pinv[1:])):.10f}")