速查
| 索引 | 训练 | 关键参数 | 时间复杂度 | 内存压缩 | 召回率 | 首选用途 |
|---|---|---|---|---|---|---|
| IndexFlat | 无 | --- | O(Nd) | 1× | 100% | 小数据基准 |
| IndexIVF | 有 | nlist/nprobe | O(nprobe·Nd/nlist) | 1× | 高 | 中规模精确 |
| IndexPQ | 有 | m/bits | 同上+解码 | 32×+ | 中高 | 内存极限 |
| IndexHNSW | 无 | M/efC/efS | ≈O(log N) | 1× | 高 | 高召回在线 |
| IndexLSH | 无 | n_bits | O(N)但桶内极少 | 1× | 低 | 低维极速筛 |
IndexFlat
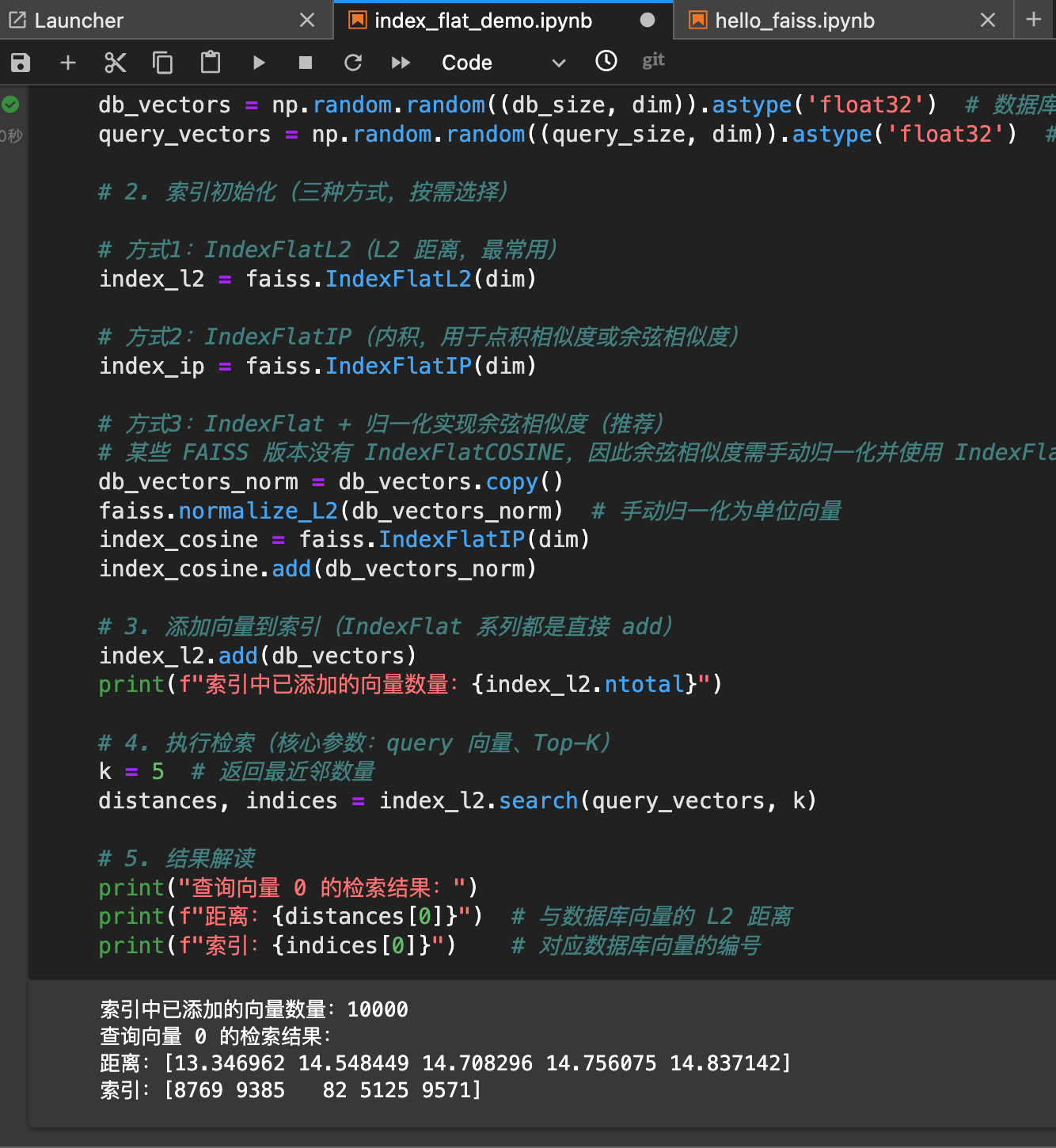
- IndexFlat系列是Faiss中最基础的索引类型,其核心是"精准检索",即遍历数据库中所有向量,计算查询向量与每个数据库向量之间的距离,最终返回距离最近的Top-K结果。因此也被称为"暴力检索"索引。
- 根据距离度量方式,IndexFlat的三种类型:
- IndexFlat2: 基于L2(欧式距离)度量。欧式距离计算为两个向量对应维度差值的平方和的平方根。适用于衡量向量空间中需要物理距离的场景。
- IndexFlatIP: 基于内积度量。内积为两个向量对应维度的乘积和。在Faiss中,内积被用作相似而非距离 。IndexFlatIP返回的是内积最大的向量。
- IndexFlatCOSINE: 基于余弦相似度度量。Faiss中余弦相似度实现:1)对所有向量进行L2归一化;2)使用内积计算相似度;3)使用负相似度作为距离,以满足按升序排序的检索逻辑。
运行效果
- 精准检索的性能瓶颈
- 时间瓶颈:O(N)的线性检索复杂度;
- 内存瓶颈:无压缩的向量存储,IndexFlat存储原始float32向量,不做压缩。float32每元素占4字节,128维向量占128x4=512字节。
实战:SIFT10k数据集精确检索对比
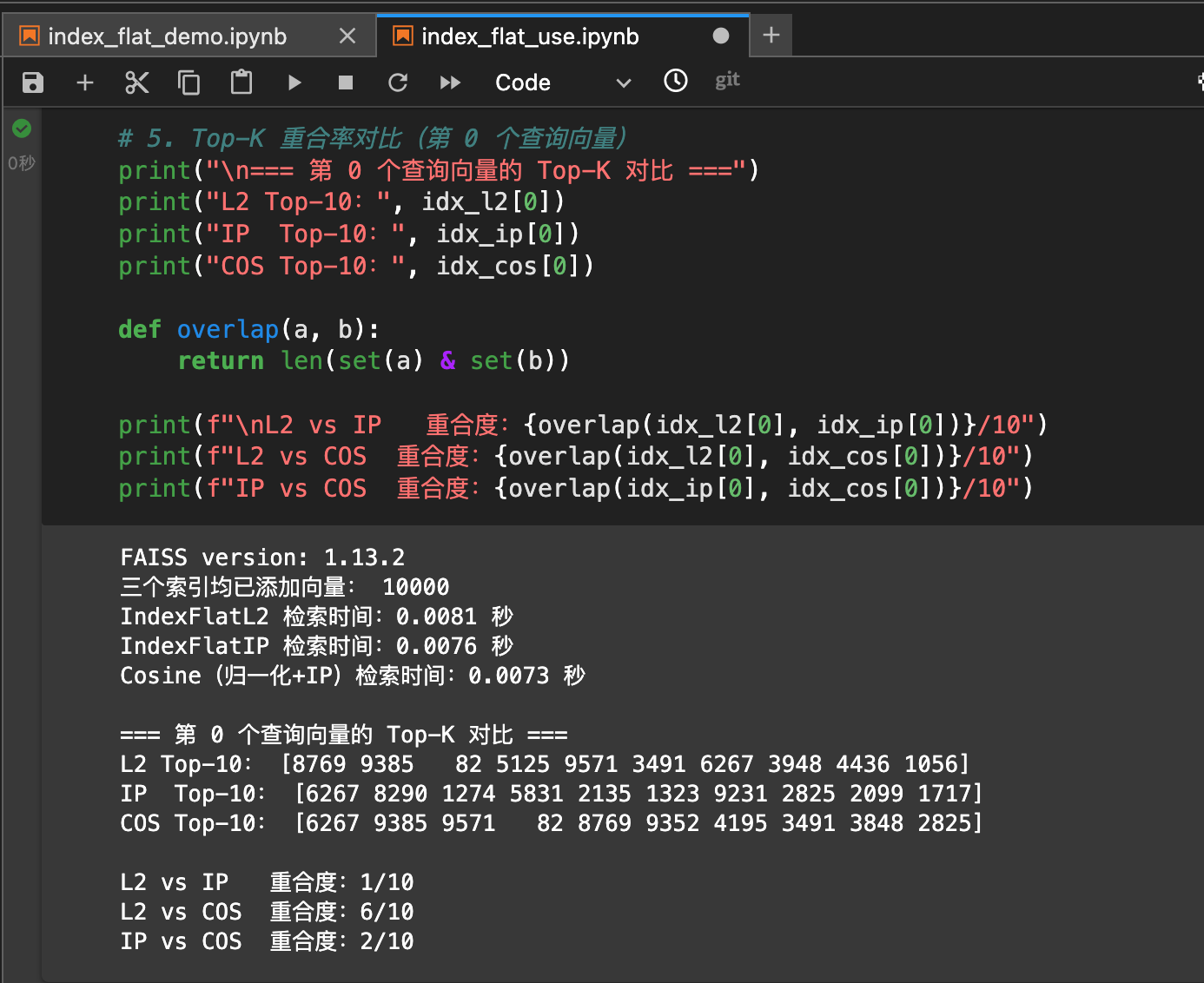
运行结论
- 不同索引检索速度差异不大。"选择索引类型"不是为了速度,而是为了"度量方式"。
- 不同距离度量会导致截然不同的检索结果。
- L2 vs IP: 10%重合度,几乎完全不同
- IP vs COS: 20%重合度,差别依然巨大。
- L2 vs COS: 60%重合度,部分一致,差别仍然明显。
- 造成不同距离度量衡量是完全不同的"相似性"的原因:
- L2: 空间位置更近
- IP: 模长大+方向一致。方向比较一致的向量,空间位置也常常比较接近。L2和COS有较高重合度。
- COS: 方向一致(不考虑模长)。IP受模长影响,COS不受模长影响(已归一化)。
总结 :选择距离度量中,要选择合适的"度量方式",才能得到合适的检索结果。
IVF系列索引
- 核心原理:倒排文件与聚类分桶
- IVF:Faiss中用于解决大规模数据检索的核心索引类型
- 核心思路:先聚类粪桶,再局部检索。以小(牺牲极小精度)换大(检索效率大幅提升)。
- 工作流程
- 索引构建阶段: 聚类分桶 -> 倒排索引构建
- 检索阶段:确定候选聚类 -> 局部精确检索。
示例: IndexIVF_FLAT- 局部精确的IVF索引
示例:IndexIVF_PQ-结合PQ(乘积)量化的IVF索引
IVF核心参数调优:nlist 与 nprobe的权衡
-
IVF系列索引的性能(检索效率、精度)主要由nlist(聚类数) 和 nprobe(检索候选聚类数) 决定
-
nlist调优逻辑: 聚类粒度与检索效率的平衡
- nlist过大:每个聚类的向量数过少,聚类中心数量增多。
- 优点:聚类粒度更细,查询向量与候选聚类的匹配更精准;
- 缺点:聚类过程(训练阶段)耗时增加,且检索时需要遍历更多聚类才能保证精度(需增大nprobe), 反而降低检索效率。
- nlist过小:每个聚类向量数过多,聚类粒度粗糙。
- 优点:训练速度快,检索时只需遍历少量聚类;
- 缺点:局部检索的向量规模增大,检索效率提升有限,且聚类中心不足,可能导致精度下降。
- nlist通常设置为数据库向量数量N的平方根附近。例如:N=10万 -> nlist=100-1000。
- nlist过大:每个聚类的向量数过少,聚类中心数量增多。
-
nprobe调优逻辑:检索精度与效率的直接权衡点
-
nprobe增大:遍历的候选聚类更多,包含目标近邻向量的概率更高。检索精度提升,但需要计算的距离数量增加,检索延迟增大。
-
nprobe减小:遍历的候选聚类减少,检索速度更快,但可能遗漏包含目标近邻的聚类,导致精度下降。
-
保证业务所需Recall的前提下,尽可能减小nprobe。通常先固定nlist, 通过实验测试不同nprobe对应的Recall和检索时间,选择最优值。
-
nprobe示例
- 示例代码
- nprobe性价比最优:从Recall 和 查询时间分析。
- 极速场景(允许低精度): nprobe=20, 适合对精度要求不高、追求极致速度的场景。
- 均衡场景(精度+速度兼顾):nprobe=50, 性价比之选。
- 高精度场景(允许慢查询):nprobe=100, 适合对精度要求极高(如科研、医疗),对延迟不敏感的场景。
PQ量化索引:压缩检索
- 核心原理:高维向量的"空间压缩术"
- 三维拆解:PQ将复杂的高维向量压缩过程拆解为"拆分-量化-编码"三步骤。
- 1)维度拆分
- 2)子空间量化
- 3)向量编码
- 三维拆解:PQ将复杂的高维向量压缩过程拆解为"拆分-量化-编码"三步骤。
- PQ索引实现:
- IndexPQ适用于中小规模数据
- IndexIVF_PQ结合倒排文件技术,专为大规模数据设计,是工业界最常用的方案。
IndexPQ使用步骤
- IndexPQ直接对所有向量PQ量化,核心参数包括向量维度(d)、子向量数量(m)和每个子量化器的位数(nbits)
- 示例代码
大规模优化:IndexIVF_PQ核心用法
- IndexIVF_PQ采用"粗筛选+精检索**的两级架构
- 1)IVF层将向量分到多个聚类分区
- 2)在目标分区内用PQ进行精确匹配。
- 示例代码
python
import faiss
import numpy as np
import time
# =========================
# 1. 数据准备
# =========================
d = 64 # 向量维度(需被 m 整除)
nb = 100_000 # 数据库向量数量
nq = 100 # 查询向量数量
k = 10 # Top-K 检索结果数
# 随机生成向量数据(实际使用可替换为真实向量,如 SIFT1M)
xb = np.random.random((nb, d)).astype('float32')
xq = np.random.random((nq, d)).astype('float32')
# =========================
# 2. IndexPQ 初始化与训练
# =========================
m = 8 # 子向量数量
# =========================
# 1. 核心参数配置
# =========================
nlist = 100 # IVF 聚类分区数
param_str = f"IVF{nlist},PQ{m}" # 索引参数字符串
# =========================
# 2. IndexIVF_PQ 初始化
# =========================
index_ivf_pq = faiss.index_factory(d, param_str, faiss.METRIC_L2) # L2距离度量
# =========================
# 3. 训练与添加数据
# =========================
index_ivf_pq.train(xb)
index_ivf_pq.add(xb)
# 设置 nprobe(搜索分区数),平衡速度与精度
index_ivf_pq.nprobe = 10 # 搜索10个分区(推荐 nlist 的 5%-20%)
# =========================
# 4. 检索
# =========================
start = time.time()
distances_ivf, indices_ivf = index_ivf_pq.search(xq, k)
end = time.time()
print(f"IndexIVF_PQ 检索用时:{end - start:.4f} 秒")
print("IndexIVF_PQ 检索结果(前5个查询向量的前3个结果):")
print(indices_ivf[:5, :3])总结
- IndexPQ: 适合中小规模数据,速度较慢但精度最高
- IndexIVF_PQ: 适合大规模数据,通过IVF分区加PQ精确匹配,大幅提升速度。
- nlist与nprobe: 平衡精度与速度关键参数,nlist 约等于数据集大小平方根,nprobe 取值5%~20%
核心问题:码本训练与精度权衡
-
PQ检索的核心矛盾是"压缩率"与"精度"的平衡,而码本训练质量直接决定了这种平衡的上限。
-
码本训练:量化效果的"基石",码本是子空间聚类中心的集合,其质量取决于训练数据和过程控制。
- 训练数据代表性:必须使用与数据库分布一致的数据(优先用全量数据库向量),否则码本无法覆盖真实数据分布,导致量化误差剧增。
- 迭代次数控制:Faiss中K-Means聚类默认迭代20次。若数据分布复杂,可以手动增加迭代次数。
- 空样本问题:若子空间内部分聚类中心无向量匹配,需减少子向量数量或增大码本规模。
-
压缩率计算:量化程度的"度量衡",PQ压缩率由子向量数量(m) 和 码本位数(nbits) 共同决定。
-
精度权衡:参数调优的"核心逻辑"。精度损失源于量化误差和搜索范围限制。通过以下调优实现平衡:
- 子向量数m: 增大m(8->16) => 精度提升(子空间更细),速度略降,压缩率降低
- 码本位数nbits: 增大nbits(8->12)=> 精度显著提升(聚类中心更多),训练时间增加
- IVF分区数nlist: 增大nlist(100->500) => 精度提升(分区更细),单次搜索分区速度略快,索引构建时间增加。
- 搜索分区数nprobe: 增大nprode(10->50) => 精度大幅提升(覆盖更多相关数据),速度降低。
实战:不同索引性能比较
精度优先选暴力搜索/IVF, 速度+内存优先选择IVF_PQ, 内存极度受限选择PQ。
总结
- PQ:通过"维度查费+子空间量化"压缩高维向量,可通过参数m(子向量数量) + nbits(码本位数)调节压缩率与精度。
- IndexIVF_PQ: 适用于大规模向量数据检索,nlist(聚类中心数) 和 nprobe(搜索分区数)是平衡速度与精度的关键参数。
HNSW索引:图结构近邻检索
- 核心思想:小世界网络与分层结构
- 网络中任意两个节点之间存在短路径,同事哦结合分层策略结构构建索引。
- 多层图结构:将向量数据集构建成多层图,上层图为"粗粒度导航层",节点连接稀疏,用于快速跨区域跳转;下层图为"细粒度精确层",节点连接密集,用于精准定位近邻。最底层(第0层)包含全部数据节点,是检索的最终区域。
- 搜索六层:检索从顶层图的随机入库开始,采用"贪婪搜索"策略向查询向量的近似近邻移动,直到找到当前层的局部最优节点;随后下降到下一层,以该最优节点为新入口节点重复搜索,直至到达最底层,最终在底层的局部最优节点附近筛选出目标近邻。
- 图结构检索的核心优势
- 高召回率:丰富的节点链接关系提供了多条导航路径,减少了因聚类划分导致的近邻遗漏问题,尤其在高维数据中表现更优。
- 稳定性能:检索性能数据分析影响较小,对于非均匀的数据集,仍能保持稳定的搜索速度和精度。
- 灵活可调:通过核心参数可精准控制性能权衡,既能满足低延迟的实时检索需求,也能通过参数调优达到接近精确检索的精度。
IndexHNSWFlat
-
IndexHNSWFLat是Faiss中HNSW索引的基础实现,采用"扁平存储**方式(不压缩向量,保证检索精度)
-
核心参数定义与作用
- M: 定义图中每层节点的最大出度(第0层通常为2*M),决定节点连接的密集程度。取值范围常用8-32。M值增大,导航路径更丰富、召回率更高,但索引构建时间更长、内存占用更大、查询延迟可能增加。
- efConstruction: 索引构建时,动态筛选邻居的候选列表大小,决定邻居选择的充分性。efConstruction增大,构建的图结构更优、检索精度更高,但索引构建时间显著增加。
- efSearch: 查询时,每层探索的候选邻居数量,直接控制查询精度与速度。不小于查询的近邻K(常用10-200)。efSearch增大,探索范围更广、召回率更高,但查询延迟增加;高质量索引可降低对efSearch的依赖。
-
HNSW vs IVF-PQ性能对比
- 核心参数调优策略:"先定结构,再优质量,最后调速度"的迭代流程:
- 确定M值:根据数据维度选择初始值(高维数据M值取16-32,低维数据M值取8-16),以"内存占用可接受"为前提,优先保证图结构的鲁棒性。
- 优化efConstruction: 在构建时间允许的情况下,尽可能增大efConstruction(如200-500),构建高质量索引,为后续查询优化预留空间。
- 调整efSearch: 以"满足目标召回率"为目标,选择最小efSearch(如召回率要求0.95时,逐步增大efSearch直至达标)
- 调参口诀:M定连接密度,efConstruction筑索引质量,efSearch控查询快慢,三者平衡是关键。
- 硬件与工程优化
- GPU加速:对于超大规模数据(千万级以上),使用GPU版本Faiss可将查询速度提升10-100倍,核心代码只需修改索引初始化。
- 批量查询:将单条查询合并为批量查询(如一次查询100条),利用向量计算的并行性,降低单位查询时间。
- 索引持久化:将构建好的索引保存到磁盘,避免重复构建,节省时间。
- 核心参数调优策略:"先定结构,再优质量,最后调速度"的迭代流程:
5LSH索引:哈希检索
-
IndexLSH原理:哈希检索的核心逻辑
- 传统哈希:最小化哈希冲突,确保不同输入映射到不同哈希值
- LSH(局部敏感哈希):最大化相似向量的哈希冲突,将相似的高维向量映射到同一个哈希桶中,非相似向量映射到同一桶的概率极低。
-
Faiss IndexLSH的实现原理
- 构建随机超平面:生成n_bits个随机超平面,超平面将高维空间分割成多个区域;
- 向量哈希编码:对于每个输入向量,计算其与所有超平面法向量的点积,点积为正则编码为1,负则编码为0,最终形成一个n_bits位的二进制哈希码;
- 桶存储与检索:将具有相同哈希码的向量归入同一桶,查询时仅需计算查询向量的哈希码,在对应桶内筛选相似向量,避免全量比对。
- 关键:n_bits是核心参数,n_bits越大,哈希码区分度越高,检索精度越高,但哈希桶数量增长,可能导致桶内向量数量过少,反而降低效率;n_bits越小则相反。
-
IndexLSH核心API解析
-
IndexLSH适用场景:低维数据的高效近似检索
-
总结
- LSH原理:通过随机超平面生成哈希码,将相似向量聚集到同一桶,实现快速近似检索;
- API核心:IndexLSH(d, n_bits)初始化,add()加向量,search()做检索,n_bits()是精度与速度的调节关键;
- 适用场景:低维、中小规模、近似检索优先的场景,如快速候选召回。