机器视觉9-镜头、相机、 光源选型以及打光
- 光源镜头相机的选型与打光
-
- 镜头(远心和非远心)选型
-
- 镜头分辨率与光圈分辨率区别
-
- 关键区别对比表
- 核心关联:光圈如何影响镜头分辨率的发挥?
- 实际应用场景(帮你快速落地)
-
- [1. 工业视觉(如字符识别、缺陷检测)](#1. 工业视觉(如字符识别、缺陷检测))
- [2. 摄影/影像](#2. 摄影/影像)
- 总结
- 相机装配后
- 镜头的MTF曲线
- 远心镜头
- 镜头选型
- 相机
-
- 工业视觉相机传感器参数选型对照表
- 选型
- 工业相机传感器参数验算公式清单
- 参数验算案例
-
- 一、检测场景基础条件
- 二、逐项参数验算(套用公式清单)
-
- [1. 单像素精度 & 分辨率计算](#1. 单像素精度 & 分辨率计算)
- [2. 最小帧率计算](#2. 最小帧率计算)
- [3. 输出接口带宽验算](#3. 输出接口带宽验算)
- [4. 最大允许曝光时间计算(防运动模糊)](#4. 最大允许曝光时间计算(防运动模糊))
- [5. ROI裁剪帧率提升验算](#5. ROI裁剪帧率提升验算)
- [6. 增益设置建议](#6. 增益设置建议)
- 三、最终选型参数总结
- 成像与调节
- 光源选型
-
- [偏振片和滤光片 :防止反光和过滤不同波长的光](#偏振片和滤光片 :防止反光和过滤不同波长的光)
- 光源种类
-
- [1. 条光(条形光源)](#1. 条光(条形光源))
- [2. 背光源(背光光源)](#2. 背光源(背光光源))
- [3. 球面光源(穹顶光源/球积分光源)](#3. 球面光源(穹顶光源/球积分光源))
- [4. 点光源](#4. 点光源)
- [5. 同轴光源](#5. 同轴光源)
- [6. 组合光源](#6. 组合光源)
- [7. 环形光](#7. 环形光)
- 快速选型速查(核心原则)
- 互补光
- 常见工业视觉检测场景光源选型对照表
- [工业相机+光源 一体化选型需求表模板](#工业相机+光源 一体化选型需求表模板)
光源镜头相机的选型与打光
推荐书目:《工程光学》
内容特点:包含几何光学和物理光学两部分内容
重要知识点:涵盖光的干涉、衍射等光学现象
适用专业:光电信息科学与工程类、仪器仪表及相关专业
课程性质:光电类专业的专业基础课程
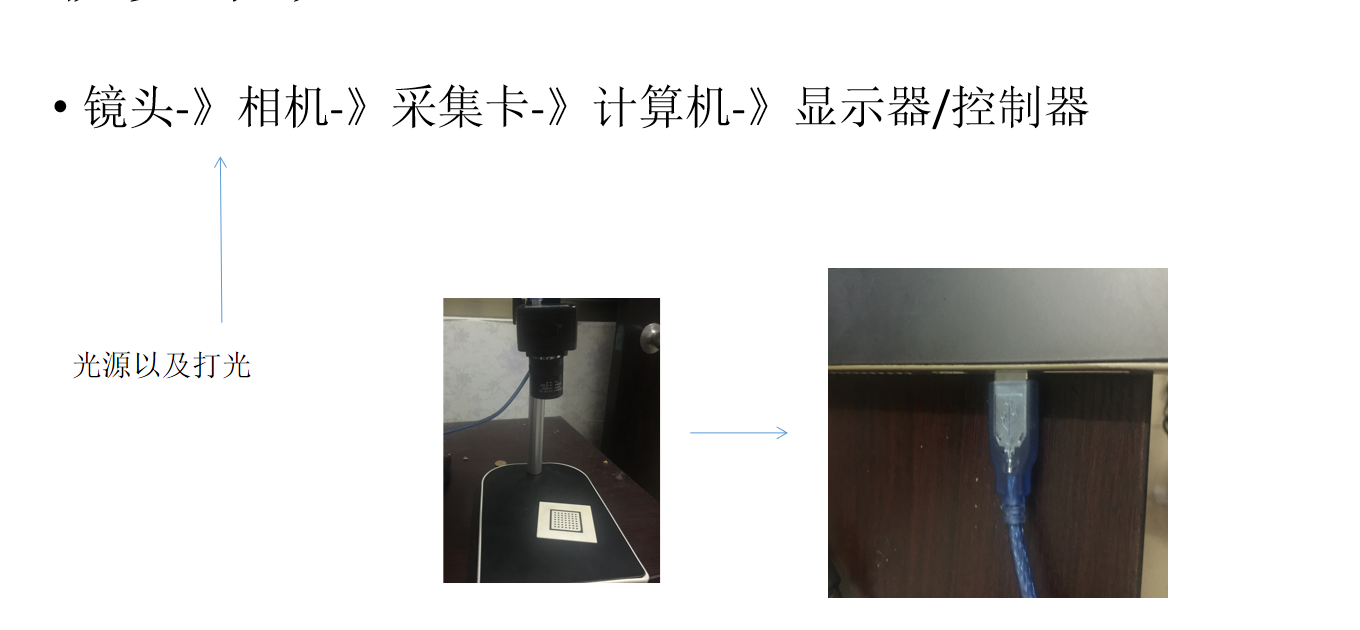
核心组件:镜头→相机→采集卡→计算机→显示器/控制器
数字相机特点:无需采集卡即可直接连接计算机
光源作用:配合镜头形成良好的成像条件
处理流程:光电转换→图像采集→计算机处理→结果显示
镜头(远心和非远心)选型
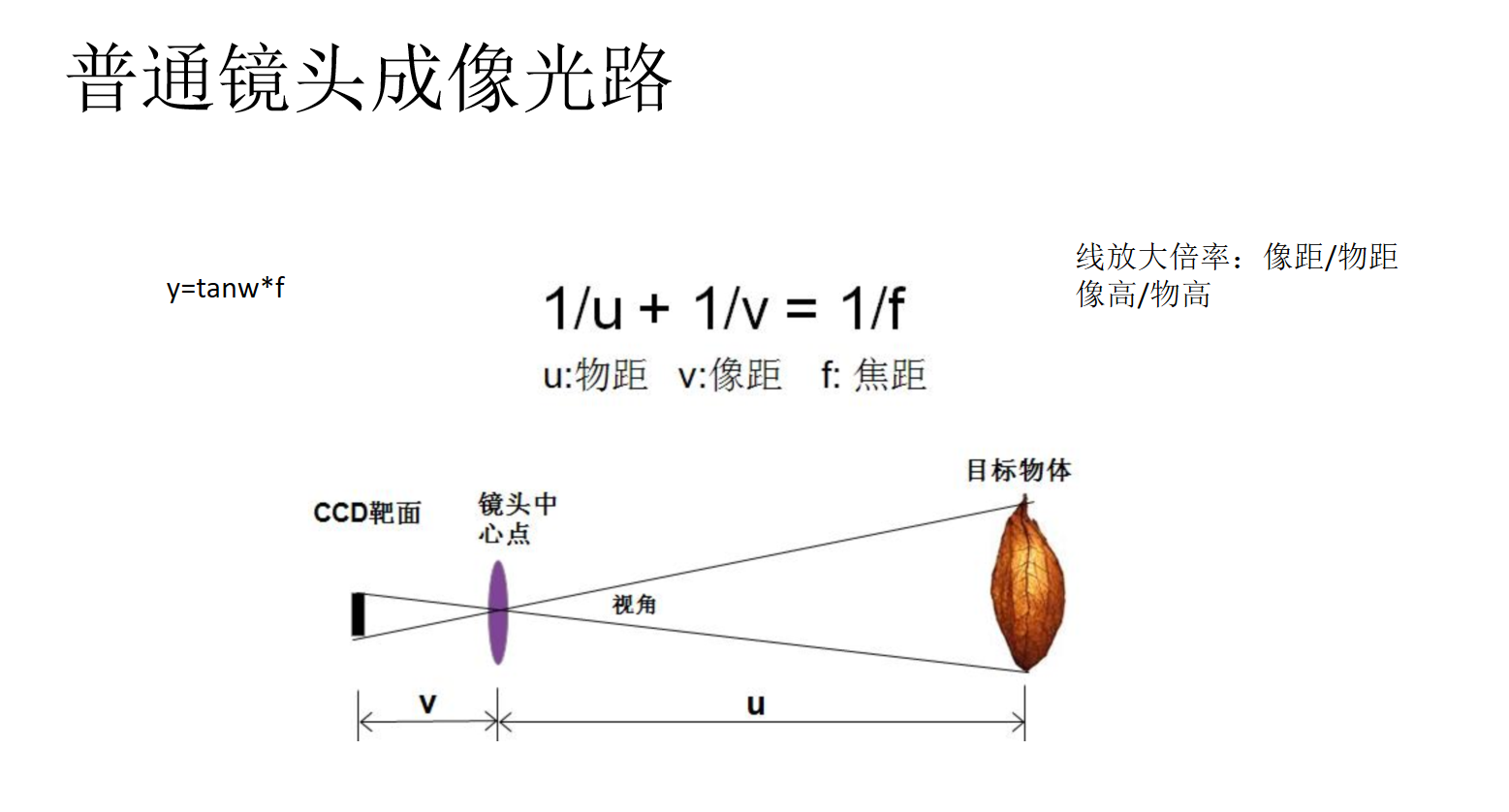
普通镜头需要掌握的基本概念:
(1)焦距 :镜头主点到焦点距离
(2)光圈:控制通光量的大小
(3)光圈数:F=f/D,D当前光圈直径,镜头分辨率与F成反比,与D成正比
(4)景深:物体成清晰像的情况下在物体空间的移动范围
1.光圈越小,景深越大2.焦距越小,景深越大3.拍摄距离越大,景深越大
(5)镜头的MTF曲线:此曲线用于评价镜头成像好坏的
(6)镜头接口:C,CS,F
(7)与镜头匹配的相机尺寸参数
(8)镜头的分辨率
镜头分辨率与光圈分辨率区别
镜头分辨率与光圈分辨率是两个定义、决定因素、实际影响完全不同 的概念,核心区别在于:镜头分辨率是镜头本身的固有光学能力上限,而光圈分辨率是光圈大小对成像分辨率的动态影响效果------前者是"硬件底子",后者是"使用条件对底子的发挥程度"。
1. 镜头分辨率(Lens Resolution)
- 定义:镜头还原物体细节的固有能力,是镜头的核心光学指标,代表镜头能清晰区分两个相邻点/线的最小距离。
- 本质:镜头的"先天硬件上限",由光学设计(如镜片曲率、镜片组数)、镜片材质(如低色散玻璃)、加工精度(如镜片镀膜、装配公差)决定,与光圈大小无关(但光圈会影响其实际发挥)。
- 衡量指标 :
- 线对/毫米(lp/mm):最常用指标,指1毫米范围内能清晰分辨的黑白线对数量(数值越高,分辨率越强,如工业镜头常见"100 lp/mm",消费级镜头常见"50-80 lp/mm");
- MTF曲线(调制传递函数):更全面的衡量,描述镜头对不同空间频率(细节粗细)的还原能力,曲线越平缓、数值越高,分辨率越稳定。
- 举例:一个"120 lp/mm"的工业远心镜头,其理论上能分辨约4.17μm的细节(1mm÷120线对×0.5,因每个线对含1黑1白),这是镜头本身的物理极限。
2. 光圈分辨率(Aperture-Related Resolution)
- 定义:光圈开度(f值)对最终成像分辨率的动态影响,是"使用条件"导致的分辨率变化,而非镜头的固有属性。
- 本质 :光圈通过改变通光量和光束角度,影响两种核心光学现象,进而改变实际成像的锐度:
- 像差抑制:大光圈(小f值,如f/1.4)时,镜头的球差、彗差、色差等像差会更明显,导致边缘细节模糊,分辨率下降;
- 衍射效应:小光圈(大f值,如f/16)时,光线通过光圈小孔会发生衍射,导致细节扩散(如星芒效果、边缘虚化),分辨率也会下降。
- 衡量方式:无独立指标,通过实际成像的锐度(如边缘清晰度、细节还原度)体现,核心是"找到光圈的'最佳分辨率区间'"。
- 举例:同一支镜头,在f/5.6-f/8时成像最锐(最佳光圈),此时像差和衍射都处于较低水平,能最大限度发挥镜头本身的分辨率;而在f/1.4(大光圈)或f/16(小光圈)时,实际分辨率会明显低于镜头的理论上限。
关键区别对比表
| 对比维度 | 镜头分辨率(Lens Resolution) | 光圈分辨率(Aperture-Related Resolution) |
|---|---|---|
| 核心属性 | 镜头的固有光学能力(硬件指标) | 光圈对成像的动态影响(使用条件) |
| 决定因素 | 光学设计、镜片材质、加工精度、镜头结构(如镜片组数) | 光圈开度(f值)、光线波长(如可见光/红外) |
| 稳定性 | 固定不变(除非镜头损坏、镜片污染或焦距/对焦偏移) | 动态变化(随光圈调节而改变) |
| 衡量指标 | 线对/毫米(lp/mm)、MTF曲线 | 无独立指标,通过实际成像锐度、细节还原度体现 |
| 影响范围 | 全画面(中心+边缘)的理论细节还原上限 | 全画面(尤其边缘)的实际细节表现,受像差和衍射双重影响 |
| 应用场景 | 镜头选型(如工业视觉需高lp/mm镜头) | 拍摄/检测时的光圈设置(如工业检测选最佳光圈保证精度) |
核心关联:光圈如何影响镜头分辨率的发挥?
镜头分辨率是"理论上限",而光圈分辨率是"实际发挥程度",两者的关系像"运动员的先天体能"与"比赛时的状态调整":
- 最佳光圈区间:每支镜头都有一个"最佳光圈"(通常在f/4-f/8之间,具体因镜头而异),此时像差和衍射都被抑制到最低,实际成像分辨率最接近镜头的理论上限;
- 大光圈(小f值):像差主导,边缘分辨率下降明显,但中心分辨率仍可能接近理论值(如人像镜头用f/1.4拍特写,中心锐度足够,边缘虚化可忽略);
- 小光圈(大f值):衍射主导,全画面分辨率下降(如风景镜头用f/11以上,细节会轻微模糊,但景深更深);
- 极端情况:若镜头本身分辨率很低(如劣质镜头50 lp/mm),即使调到最佳光圈,实际分辨率也远低于优质镜头(如100 lp/mm)在非最佳光圈的表现------"硬件底子"决定了上限,光圈只是优化手段。
实际应用场景(帮你快速落地)
1. 工业视觉(如字符识别、缺陷检测)
- 选镜头时:优先看"镜头分辨率(lp/mm)",需满足检测需求(如识别0.01mm的字符,需镜头分辨率≥100 lp/mm);
- 调光圈时:固定在最佳光圈(通过测试找到,如f/5.6),避免大光圈像差或小光圈衍射导致精度下降,确保每次检测的分辨率稳定。
2. 摄影/影像
- 选镜头时:通过MTF曲线判断镜头分辨率(中心MTF值越高、边缘与中心差距越小,镜头越优质);
- 拍照片时:拍风景需景深+锐度,选f/8-f/11(接近最佳光圈);拍人像需虚化,用f/1.4-f/2.8(牺牲边缘锐度换背景虚化);拍产品特写需全画面锐度,选最佳光圈(如f/5.6)。
总结
- 一句话区分:镜头分辨率是"镜头能做到多好",光圈分辨率是"实际使用中能发挥多好";
- 核心逻辑:先选高分辨率的镜头(打好硬件基础),再通过调节光圈找到最佳区间(最大化发挥硬件能力);
- 避坑提醒:不要误以为"小光圈=高分辨率",过小的光圈会因衍射降低锐度;也不要忽视镜头分辨率,再怎么调光圈,也无法突破镜头本身的物理极限。
相机装配后
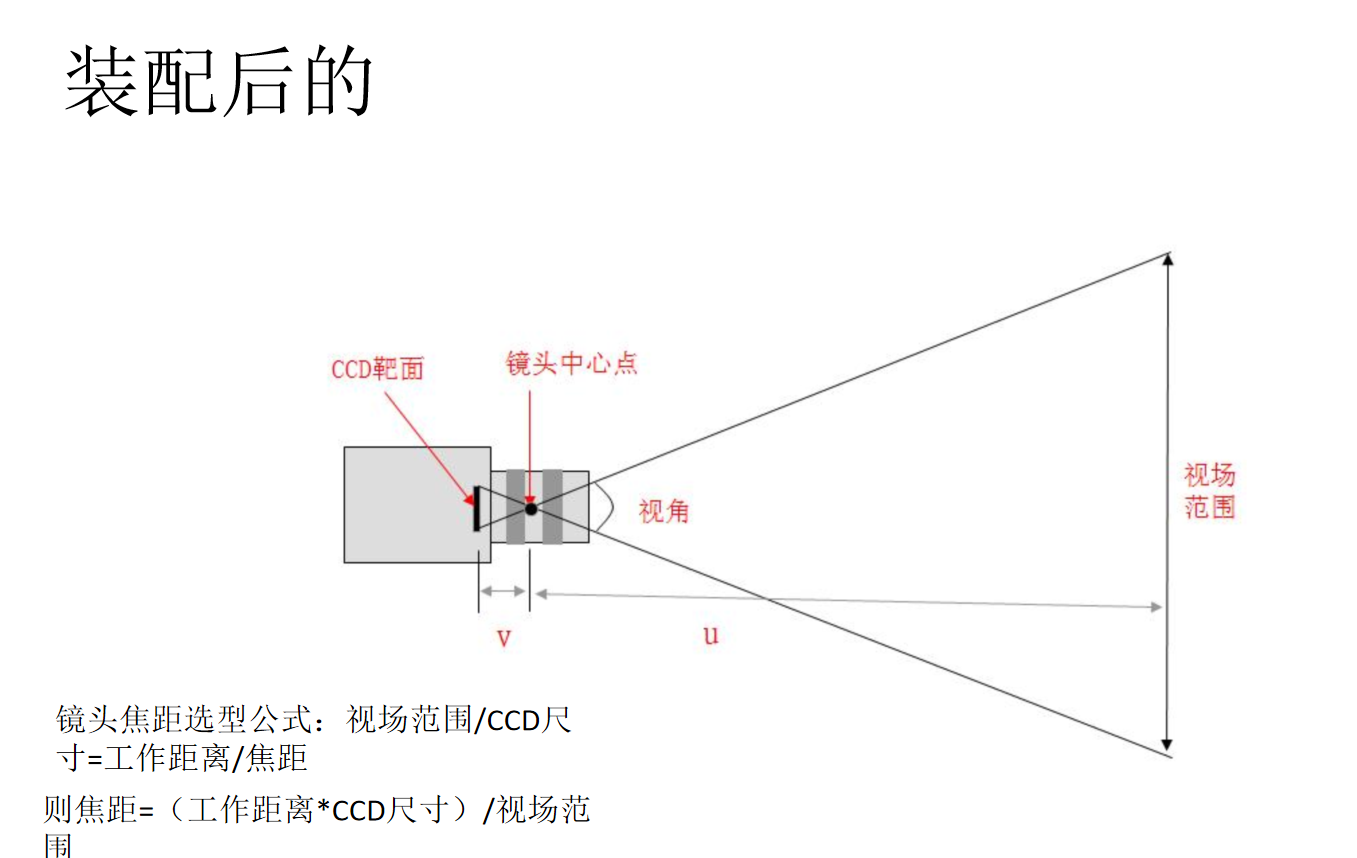
基本原理:基于相似三角形原理,视场范围/CCD尺寸=工作距离/焦距
公式变形:焦距=(工作距离×CCD尺寸)/视场范围
单位换算:1英寸=16mm(工业标准),非25.4mm
接口匹配:镜头成像像面需≥CCD尺寸,C/CS接口需对应或加接圈
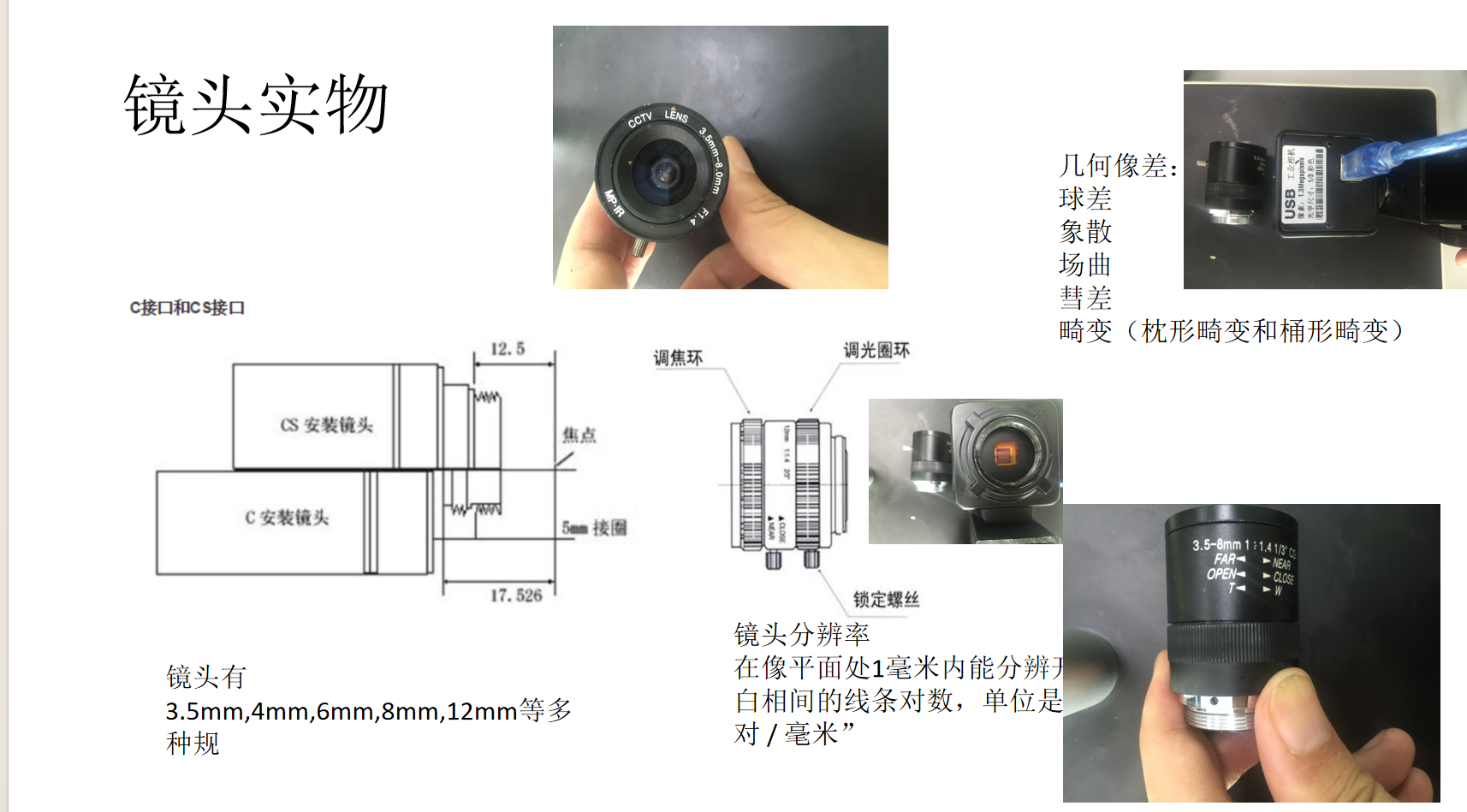
物理结构:包含调焦环、光圈环和锁定螺丝等部件
分辨率定义:在像平面处1毫米内能分辨的黑白相间线条对数,单位为"线对/毫米"
工作距离:示例中显示焦点距离为5米
安装方式:镜头与相机为分体式设计,通过支架固定
例题:客户已知观察范围求焦距
题目解析
已知:观察范围30×30mm,工作距离100mm,CCD尺寸1/3英寸
计算步骤:
查表得1/3英寸CCD垂直尺寸3.6mm
套用公式:
选型注意:
实际可选变焦镜头(如8-16mm)
测量应用需选畸变小的镜头
易错点:
混淆工业英寸(16mm)与标准英寸(25.4mm)
例题:客户已知系统分辨率求焦距
题目解析
已知:系统分辨率0.06mm,像元4.7μm,工作距离>100mm
计算步骤:
放大倍率
焦距公式:(L取最小工作距离100mm)
关键推导:
联合高斯公式与放大率
分辨率对应物方0.06mm=像方1个像元(4.7μm)
选型原则:
测量应用优先远心镜头
需验证像面尺寸匹配性
镜头的MTF曲线
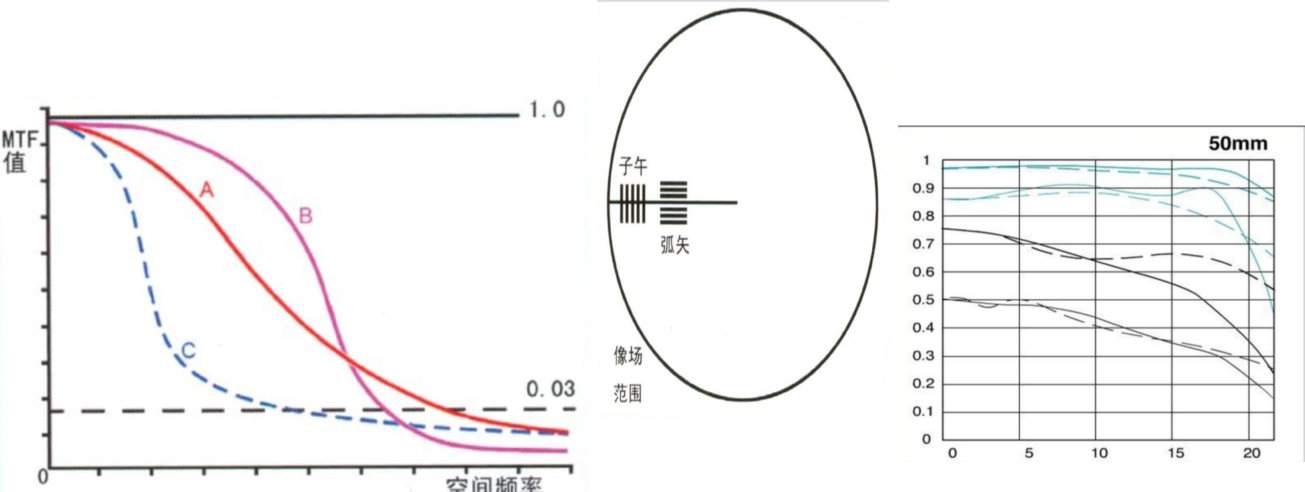
曲线A所代表的镜头在低频段反差适中,但随着空间频率的提高,它的衰减过程很慢。说明其素质还是不错的。
曲线B所代表的镜头在低频表现很好,说明镜头的反差很好。但随着空间频率的提高。它的曲线衰减很快,说明镜头的分辨率不算很好。
曲线C所代表的镜头在低频时就很快衰减,综合素质较低。
1.MTF曲线越高越好,越高说明镜头光学质量越好。综合反差和分辨率来看,MTF曲线以下包含面积越大越好。 2、 MTF曲线越平直越好,越平直越说明边缘与中间一致性好。边缘严重下降说明边角反差与分辨率较低
远心镜头
物方远心:入瞳在物方无穷远
像方远心:入瞳在像方无穷远
双远心:物像双方均为平行光
核心优势:
校正畸变:物体位置变化不影响成像位置
恒定放大率:工作距离变化不影响放大倍数
应用注意:
放大倍率通常<1(如0.5X)
视场较小但成像质量高
景深不一定大,需根据实际需求选择
镜头选型
焦距计算:
已知观察范围和工作距离时:(CCD垂直尺寸按1/3型计算为3.6mm)
已知系统分辨率0.06mm和像元大小4.7μm时:先计算放大倍率,再得焦距
选型原则:
无变焦需求时优先选择定焦镜头
测量应用需选用畸变小的镜头或远心镜头
镜头成像像面必须≥CCD尺寸,接口需与相机匹配
缺陷检测需将理论像素值乘以3-4倍(如30万像素需求实际应选120万像素)
相机
1.曝光
2分辨率
3.增益
4.帧率
5.尺寸
6.和镜头的接口
7.输出接口
8.白平衡
是相机传感器(CCD/CMOS)及配套系统的核心性能与功能参数,直接决定相机的成像质量、适用场景和数据交互能力。以下是针对每一项的详细拆解,结合消费级相机与工业视觉相机的应用特点整理:
| 参数项 | 核心定义 | 与CCD/CMOS传感器的关联 | 关键作用 & 应用注意事项 |
|---|---|---|---|
| 1. 曝光 | 传感器接收光线并转换为电信号的过程 | 曝光量由传感器感光时间(快门)、进光量(光圈)、信号放大倍数(ISO) 共同决定;传感器的感光灵敏度直接影响曝光效率 | 决定画面亮度与动态范围。 工业视觉中需精准控制曝光时间,避免过曝/欠曝导致检测特征丢失 |
| 2. 分辨率 | 传感器的像素总数,公式为:水平像素 × 垂直像素(如2400万=6000×4000) | 由传感器的像素密度与物理尺寸决定;相同尺寸下像素密度越高,分辨率越高,但可能增加噪点 | 决定图像细节丰富度。 机器视觉检测中,高分辨率适合微小缺陷识别(如电子元件引脚检测) |
| 3. 增益 | 对传感器输出的电信号进行放大的过程(对应摄影中的ISO感光度) | 分为硬件增益 (传感器端放大信号,噪点少)和数字增益(软件端放大信号,噪点多) | 提升弱光环境下的画面亮度。 工业场景优先用硬件增益,减少噪点对检测精度的干扰 |
| 4. 帧率 | 传感器每秒能输出的完整图像帧数,单位fps(帧/秒) | 由传感器的像素读取速度、数据传输带宽决定;高分辨率传感器通常帧率较低(需平衡) | 决定动态捕捉能力。 高速运动物体检测(如流水线工件)需高帧率相机(如100fps以上) |
| 5. 尺寸 | 传感器的有效感光面积,常见规格:全画幅(36×24mm)、APS-C、M4/3、1英寸、工业级小靶面 | 尺寸越大,单个像素感光面积越大,弱光性能与动态范围越好 | 消费级相机:大尺寸传感器画质更优; 工业相机:小靶面传感器适配小型镜头,节省安装空间 |
| 6. 镜头接口 | 相机机身与镜头的连接标准 | 接口规格决定镜头兼容性,与传感器靶面尺寸需匹配(如大靶面传感器配大接口镜头,避免画面暗角) | 消费级常见:佳能EF、索尼E、尼康Z; 工业级常见:C口、CS口、F口,需注意接口法兰距 |
| 7. 输出接口 | 传感器将数字图像数据传输至终端(电脑/控制器)的接口 | 接口带宽决定分辨率+帧率的上限(带宽不足会限制高参数传输) | 消费级常见:USB 3.0、HDMI; 工业级常见:GigE(千兆网)、Camera Link、USB3.1,适配自动化产线的数据传输需求 |
| 8. 白平衡 | 通过调整传感器对红/绿/蓝三色光的灵敏度,还原场景真实色彩的功能 | 基于传感器的色彩滤镜阵列(CFA) 工作,结合算法修正不同色温下的色彩偏差 | 消除环境光的色偏(如白炽灯下的黄色调)。 工业视觉中需固定白平衡参数,保证检测标准一致 |
补充关键关联点
- 分辨率与帧率的权衡 :同一传感器,分辨率越高,帧率越低(像素读取耗时更长);工业相机可通过ROI(感兴趣区域)裁剪,只读取部分像素,提升帧率。
- 增益与噪点的矛盾 :增益越高,画面越亮,但噪点越多;机器视觉中可通过补光替代高增益,保证画质。
工业视觉相机传感器参数选型对照表
| 检测场景 | 核心需求 | 曝光 | 分辨率 | 增益 | 帧率 | 传感器尺寸 | 镜头接口 | 输出接口 | 白平衡 |
|---|---|---|---|---|---|---|---|---|---|
| 静态微小缺陷检测 (如电子元件引脚、PCB焊盘) | 高细节识别,缺陷无遗漏 | 长曝光(10--100ms) 搭配稳定光源 | 高分辨率(≥1200万像素) 像素尺寸≤3μm | 低增益(0--10dB) 优先硬件增益 | 低帧率(5--15fps) 无需高速度 | 小靶面(1/1.8″--1/1.2″) 适配微距镜头 | C口/CS口 兼容工业微距镜头 | GigE/USB3.0 满足高分辨率数据传输 | 固定手动白平衡 避免光源色温波动干扰 |
| 高速流水线工件定位 (如食品包装、零件分拣) | 运动物体无拖影,实时追踪 | 短曝光(≤1ms) 减少运动模糊 | 中分辨率(200--500万像素) 兼顾细节与速度 | 低--中增益(0--20dB) 光源不足时适度提升 | 高帧率(≥60fps) 支持ROI裁剪提帧 | 中等靶面(1/1.2″--1″) 平衡视野与安装空间 | C口 高通用性适配流水线镜头 | GigE Vision/Camera Link 高带宽低延迟 | 自动白平衡(快速适配产线光源变化) |
| 大面积尺寸测量 (如板材、玻璃面板) | 全视野清晰,测量精度高 | 中曝光(5--50ms) 均匀布光配合 | 中高分辨率(500--1000万像素) 像素尺寸≥4μm提升动态范围 | 低增益(0--10dB) 避免噪点影响测量精度 | 中帧率(15--30fps) 满足流水线节拍 | 大靶面(1″--全画幅) 减少拼接次数 | F口/C口 适配广角工业镜头 | GigE Vision 支持多相机同步传输 | 固定手动白平衡 保证测量色彩一致性 |
| 弱光环境检测 (如金属焊缝、暗场成像) | 低光照下清晰成像,噪点可控 | 中长曝光(50--200ms) 搭配低噪光源 | 中分辨率(300--600万像素) 大像素尺寸(≥5μm)提升感光 | 中增益(10--30dB) 优先硬件增益,禁用数字增益 | 低帧率(5--10fps) 长曝光限制帧率 | 中等靶面(1/1.2″--1″) 平衡感光与视野 | C口 适配低畸变镜头 | USB3.1 高带宽传输弱光下的高清数据 | 手动白平衡 匹配暗场光源色温 |
| 彩色外观检测 (如塑料件色差、包装印刷) | 色彩还原准确,无偏色 | 中曝光(5--30ms) 稳定白光光源 | 中分辨率(300--800万像素) RGB色彩滤镜阵列 | 低增益(0--10dB) 减少色彩噪点 | 中帧率(15--30fps) 满足外观检测节拍 | 中等靶面(1/1.8″--1″) 适配彩色镜头 | C口 兼容彩色工业镜头 | GigE/USB3.0 满足彩色图像传输 | 精准手动白平衡 用标准色卡校准 |
选型
基本公式:
横向像素数 = 视野宽度/精度要求
纵向像素数 = 视野高度/精度要求
总像素数 = 横向像素数 × 纵向像素数
工程实践:
检测应用需3-4倍冗余(如30万像素需求应选120万像素)
示例:12×10mm视野,0.02mm精度需求,计算得万像素,实际应选120万像素
配套计算: 根据CCD尺寸可进一步计算所需镜头焦距
选型关键技巧
- 分辨率与视野匹配 :根据检测物体尺寸和精度要求计算像素需求,公式:
单像素精度 = 视野宽度 ÷ 水平像素数,避免盲目追求高分辨率。 - 帧率与流水线速度匹配 :帧率需≥流水线工件通过速度的1.2倍,避免漏检;可通过ROI裁剪(只读取检测区域像素)提升帧率。
- 接口带宽验算 :确保输出接口带宽≥
分辨率 × 帧率 × 像素位深,防止数据传输卡顿。
工业相机传感器参数验算公式清单
| 计算目标 | 核心公式 | 参数说明 | 应用场景 & 注意事项 |
|---|---|---|---|
| 1. 单像素精度(检测精度核心) | 单像素精度(mm/px) = 视野宽度(mm) 水平像素数(px) \text{单像素精度(mm/px)}=\frac{\text{视野宽度(mm)}}{\text{水平像素数(px)}} 单像素精度(mm/px)=水平像素数(px)视野宽度(mm) | - 视野宽度:相机拍摄覆盖的实际物体宽度 - 水平像素数:传感器的水平分辨率 | 用于尺寸测量、微小缺陷检测 例:视野宽 100mm,水平像素 2000px → 精度=0.05mm/px 注意:精度需≤被测缺陷最小尺寸的 1/2 |
| 2. 最小帧率需求(匹配流水线速度) | 最小帧率(fps) = 工件速度(mm/s) × 单位时间工件数 视野长度(mm) \text{最小帧率(fps)}=\frac{\text{工件速度(mm/s)} \times \text{单位时间工件数}}{\text{视野长度(mm)}} 最小帧率(fps)=视野长度(mm)工件速度(mm/s)×单位时间工件数 | - 工件速度:流水线运行速度 - 视野长度:相机拍摄覆盖的物体长度 | 用于高速分拣、动态定位 例:工件速度 500mm/s,视野长 100mm → 最小帧率=5fps 注意:实际帧率需≥计算值的 1.2 倍(预留冗余) |
| 3. 接口带宽需求(避免数据卡顿) | 带宽(MB/s) = 分辨率(px) × 像素位深(bit) × 帧率(fps) 8 × 1024 × 1024 \text{带宽(MB/s)}=\frac{\text{分辨率(px)} \times \text{像素位深(bit)} \times \text{帧率(fps)}}{8 \times 1024 \times 1024} 带宽(MB/s)=8×1024×1024分辨率(px)×像素位深(bit)×帧率(fps) | - 分辨率:水平像素×垂直像素 - 像素位深:常见 8bit(灰度)、24bit(彩色) | 用于输出接口选型 例:200万像素(1920×1080)、8bit、30fps → 带宽≈5.9MB/s 注意:实际接口带宽需≥计算值的 1.5 倍 |
| 4. 最大允许曝光时间(避免运动模糊) | 最大曝光时间(s) = 单像素精度(mm/px) × 1.2 工件速度(mm/s) \text{最大曝光时间(s)}=\frac{\text{单像素精度(mm/px)} \times 1.2}{\text{工件速度(mm/s)}} 最大曝光时间(s)=工件速度(mm/s)单像素精度(mm/px)×1.2 | - 1.2:运动模糊安全系数 - 工件速度:流水线或被测物体运动速度 | 用于高速运动物体检测 例:精度 0.05mm/px,速度 500mm/s → 最大曝光时间=1.2×10⁻⁴s=120μs 注意:曝光时间超过此值会出现拖影 |
| 5. ROI 裁剪后帧率提升 | 裁剪后帧率(fps) ≈ 原帧率(fps) × 原传感器像素总数 裁剪后像素总数 \text{裁剪后帧率(fps)} \approx \text{原帧率(fps)} \times \frac{\text{原传感器像素总数}}{\text{裁剪后像素总数}} 裁剪后帧率(fps)≈原帧率(fps)×裁剪后像素总数原传感器像素总数 | - 裁剪后像素总数:ROI 区域的水平×垂直像素 | 用于提升帧率、降低带宽 例:原 1200万像素、10fps,裁剪后 300万像素 → 帧率≈40fps 注意:裁剪区域需覆盖被测特征 |
| 6. 增益与噪点阈值 | 推荐最大硬件增益(dB) ≤ 20 dB \text{推荐最大硬件增益(dB)} \leq 20\text{dB} 推荐最大硬件增益(dB)≤20dB | - 硬件增益:传感器端信号放大,噪点低 - 数字增益:软件端放大,噪点高 | 用于弱光环境参数设置 注意:数字增益尽量禁用;增益>20dB 时需搭配补光,否则噪点会影响检测精度 |
通用计算原则
- 所有计算需预留 20%--50% 冗余,适配产线波动、设备误差;
- 优先通过调整光源/曝光时间提升画质,而非依赖高增益;
- 带宽计算需考虑相机的数据压缩格式(如 JPEG 压缩可降低带宽)。
参数验算案例
一、检测场景基础条件
被测对象:0402贴片电阻引脚
- 引脚最小宽度: 0.05 mm 0.05\ \text{mm} 0.05 mm
- 流水线运行速度: 200 mm/s 200\ \text{mm/s} 200 mm/s
- 检测需求:覆盖10个元件的视野宽度,无运动模糊,检测精度≥99.5%
- 光源方案:环形无影光源(稳定白光,色温5500K)
二、逐项参数验算(套用公式清单)
1. 单像素精度 & 分辨率计算
核心公式 : 单像素精度(mm/px) = 视野宽度(mm) 水平像素数(px) \text{单像素精度(mm/px)}=\frac{\text{视野宽度(mm)}}{\text{水平像素数(px)}} 单像素精度(mm/px)=水平像素数(px)视野宽度(mm)
- 设定原则:单像素精度 ≤ 被测引脚最小宽度的 1 2 \frac{1}{2} 21(保证缺陷清晰成像)
→ 最大允许单像素精度: 0.05 mm ÷ 2 = 0.025 mm/px 0.05\ \text{mm} \div 2 = 0.025\ \text{mm/px} 0.05 mm÷2=0.025 mm/px - 视野宽度:10个元件总宽度(含间距),单个元件+间距= 1 mm 1\ \text{mm} 1 mm → 总视野宽= 10 × 1 = 10 mm 10 \times 1 = 10\ \text{mm} 10×1=10 mm
- 水平像素数计算:
水平像素数 = 视野宽度 单像素精度 = 10 0.025 = 400 px \text{水平像素数} = \frac{\text{视野宽度}}{\text{单像素精度}} = \frac{10}{0.025}=400\ \text{px} 水平像素数=单像素精度视野宽度=0.02510=400 px - 垂直像素数(按视野比例1:0.8): 400 × 0.8 = 320 px 400 \times 0.8 = 320\ \text{px} 400×0.8=320 px
- 最终分辨率 : 400 × 320 = 12.8 万像素 400 \times 320 = 12.8\ \text{万像素} 400×320=12.8 万像素(实际选型建议选200万像素,预留冗余)
2. 最小帧率计算
核心公式 : 最小帧率(fps) = 工件速度(mm/s) × 单位时间工件数 视野长度(mm) \text{最小帧率(fps)}=\frac{\text{工件速度(mm/s)} \times \text{单位时间工件数}}{\text{视野长度(mm)}} 最小帧率(fps)=视野长度(mm)工件速度(mm/s)×单位时间工件数
- 视野长度:单帧覆盖元件的纵向长度= 5 mm 5\ \text{mm} 5 mm
- 单位时间工件数:按连续检测取 1 1 1
- 最小帧率计算:
最小帧率 = 200 × 1 5 = 40 fps \text{最小帧率} = \frac{200 \times 1}{5}=40\ \text{fps} 最小帧率=5200×1=40 fps - 最终选型帧率 :预留20%冗余 → 40 × 1.2 = 48 fps 40 \times 1.2 = 48\ \text{fps} 40×1.2=48 fps
3. 输出接口带宽验算
核心公式 : 带宽(MB/s) = 分辨率(px) × 像素位深(bit) × 帧率(fps) 8 × 1024 × 1024 \text{带宽(MB/s)}=\frac{\text{分辨率(px)} \times \text{像素位深(bit)} \times \text{帧率(fps)}}{8 \times 1024 \times 1024} 带宽(MB/s)=8×1024×1024分辨率(px)×像素位深(bit)×帧率(fps)
- 选型参数:200万像素( 1600 × 1200 1600 \times 1200 1600×1200)、灰度图8bit、帧率48fps
- 带宽计算:
带宽 = 1600 × 1200 × 8 × 48 8 × 1024 × 1024 ≈ 11.25 MB/s \text{带宽} = \frac{1600 \times 1200 \times 8 \times 48}{8 \times 1024 \times 1024} \approx 11.25\ \text{MB/s} 带宽=8×1024×10241600×1200×8×48≈11.25 MB/s - 接口选型建议:USB3.0(带宽5Gbps,约625MB/s)或GigE(带宽125MB/s),完全满足需求
4. 最大允许曝光时间计算(防运动模糊)
核心公式 : 最大曝光时间(s) = 单像素精度(mm/px) × 1.2 工件速度(mm/s) \text{最大曝光时间(s)}=\frac{\text{单像素精度(mm/px)} \times 1.2}{\text{工件速度(mm/s)}} 最大曝光时间(s)=工件速度(mm/s)单像素精度(mm/px)×1.2
- 单像素精度: 0.025 mm/px 0.025\ \text{mm/px} 0.025 mm/px
- 最大曝光时间计算:
最大曝光时间 = 0.025 × 1.2 200 = 1.5 × 10 − 4 s = 150 μ s \text{最大曝光时间} = \frac{0.025 \times 1.2}{200}=1.5 \times 10^{-4}\ \text{s}=150\ \mu\text{s} 最大曝光时间=2000.025×1.2=1.5×10−4 s=150 μs - 最终曝光设置 :实际设为 100 μ s 100\ \mu\text{s} 100 μs,低于阈值避免拖影
5. ROI裁剪帧率提升验算
- 原传感器:500万像素( 2592 × 1944 2592 \times 1944 2592×1944),原帧率30fps
- 裁剪后像素:200万像素( 1600 × 1200 1600 \times 1200 1600×1200)
- 提升后帧率计算:
裁剪后帧率 = 30 × 2592 × 1944 1600 × 1200 ≈ 76 fps \text{裁剪后帧率} = 30 \times \frac{2592 \times 1944}{1600 \times 1200} \approx 76\ \text{fps} 裁剪后帧率=30×1600×12002592×1944≈76 fps - 结论:裁剪后帧率远超需求,可降低相机硬件成本
6. 增益设置建议
- 光源充足时:硬件增益设为 0 dB 0\ \text{dB} 0 dB,禁用数字增益,避免噪点干扰引脚边缘识别
- 弱光补偿时:硬件增益最大不超过 15 dB 15\ \text{dB} 15 dB,同时延长曝光时间至 120 μ s 120\ \mu\text{s} 120 μs(仍低于阈值)
三、最终选型参数总结
| 参数项 | 计算值 | 实际选型值 |
|---|---|---|
| 分辨率 | 12.8万像素 | 200万像素(1600×1200) |
| 帧率 | 40fps | 48fps |
| 曝光时间 | ≤150μs | 100μs |
| 增益 | ≤15dB | 0--15dB(硬件增益) |
| 镜头接口 | --- | C口(适配工业微距镜头) |
| 输出接口 | --- | USB3.0 |
| 白平衡 | --- | 手动固定(匹配5500K光源) |
成像与调节
相机与镜头匹配原则
镜头分辨率必须大于相机分辨率,否则高像素相机无效
镜头视野范围需≥相机尺寸,否则会出现黑边
接口不一致时需加5mm接圈,否则无法调焦清晰
焦距与清晰度调节
调焦环:旋转改变物距使成像清晰
锁定螺丝:固定调焦位置防止偏移
注意:先调物距再调焦距,通过旋钮观察清晰度变化
光圈调节
小旋钮控制光圈大小,影响进光量
光圈越小(数值越大)图像越暗但景深越大
实际演示显示:光圈开大时亮度增加但景深减小
景深
**定义:**保持清晰成像的物距变化范围
特性:
拍摄距离越远景深越大
光圈越小景深越大
**判断标准:**移动物体至开始模糊的临界距离即为景深边界
光源选型
光源:照明系统
偏振片和滤光片()
测量项目要用远心或者低畸变镜头+背光源
光源种类:
条光
背光源
球面光源
点光源
同轴光源
组合光源
环形光
偏振片和滤光片 :防止反光和过滤不同波长的光
滤光片功能:通过选择性透射特定波长的光来过滤不需要的光波,例如在检测中只保留目标物体反射的特征波长。
偏振片原理:利用光的横波特性,通过限制光的振动方向来消除特定方向的反射光。当自然光(含多方向振动)通过偏振片后,只保留单一振动方向的光分量。
防反光机制:物体表面反射光通常包含多个振动方向分量,偏振片通过过滤掉特定振动方向的分量(如平行于反射面的分量),从而显著减弱镜面反射效应。
偏振光分类:
线偏振光:光矢量末端轨迹为直线
圆偏振光:光矢量末端轨迹为圆形
椭圆偏振光:光矢量末端轨迹为椭圆
光源种类
条光
背光源
球面光源
点光源
同轴光源
组合光源
环形光
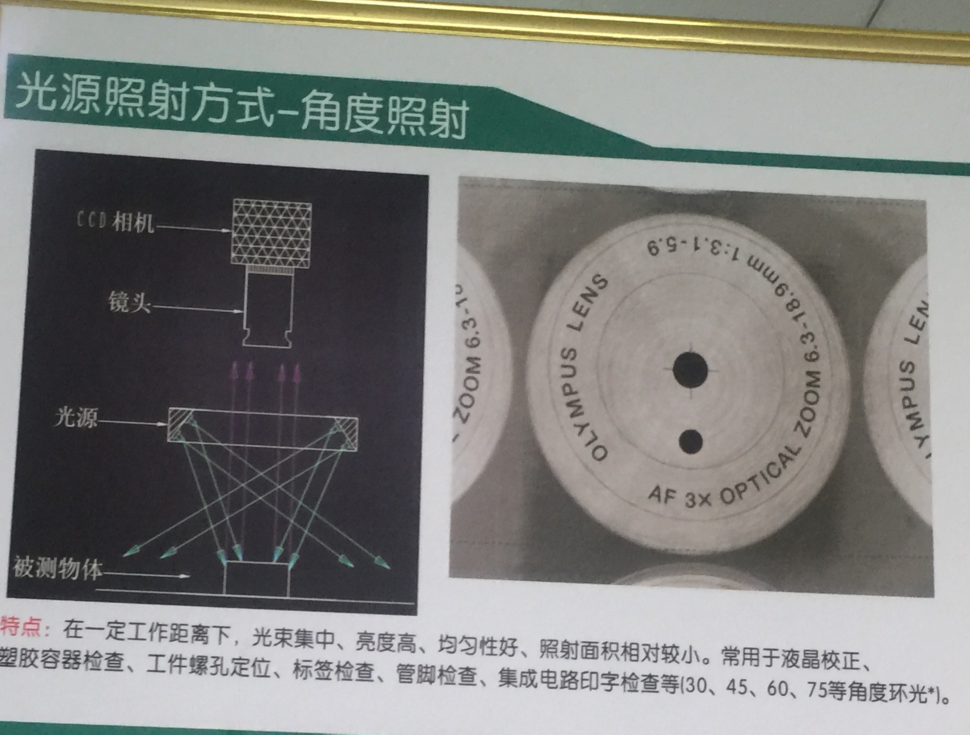
在工业机器视觉 应用中,光源是图像采集的核心基础,其作用是提升被测物与背景的对比度、消除阴影/反光、突出检测特征,你提到的这7类均为机器视觉的主流专用光源,以下按核心特性、发光形式、典型应用、核心优势做结构化解析,适配工业检测的项目选型与实践需求,关键特性做加粗标注,便于快速查阅和归档。
1. 条光(条形光源)
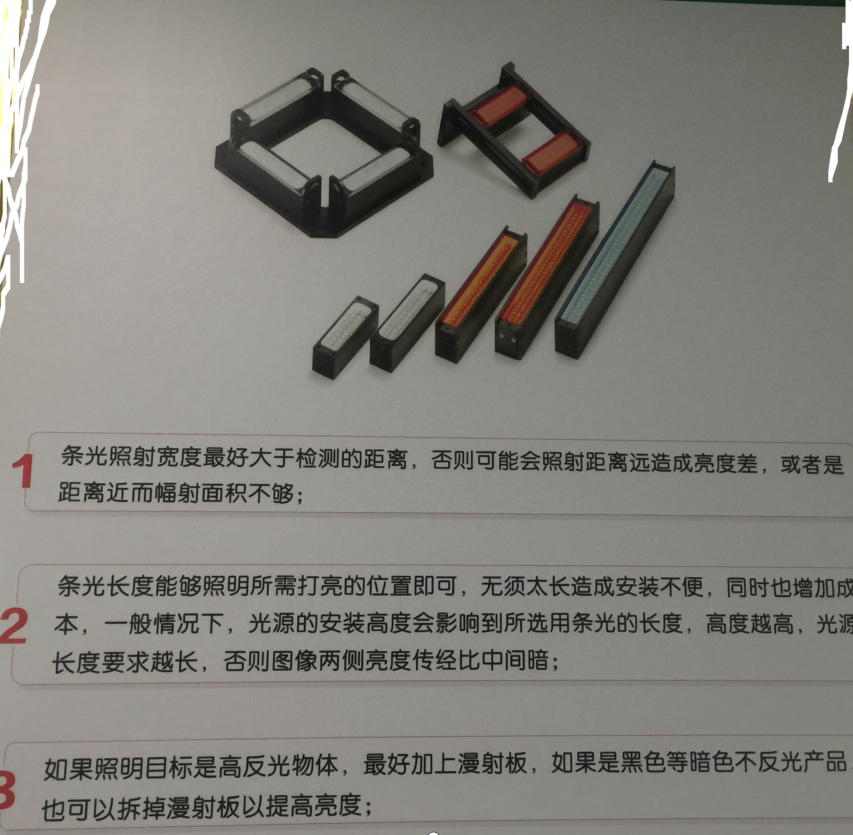
核心特性 :机器视觉中最通用、最基础 的光源类型,模块化设计,支持多根拼接拓展发光面积。
发光形式 :长条形发光面,分面发光(漫射条光)和线发光(聚光条光) ,可水平/垂直/斜向安装,发光角度可定制(15°/30°/60°/90°)。
典型应用 :平面工件的表面缺陷检测(如PCB板划痕、玻璃表面脏污)、边缘/轮廓提取、字符识别(平面喷码)、电子元件引脚检测、卷材(薄膜/金属箔)表面检测。
核心优势:亮度连续可调、拼接灵活(可组成面光源)、安装方式多样、适配大部分常规平面检测场景,成本较低。
2. 背光源(背光光源)
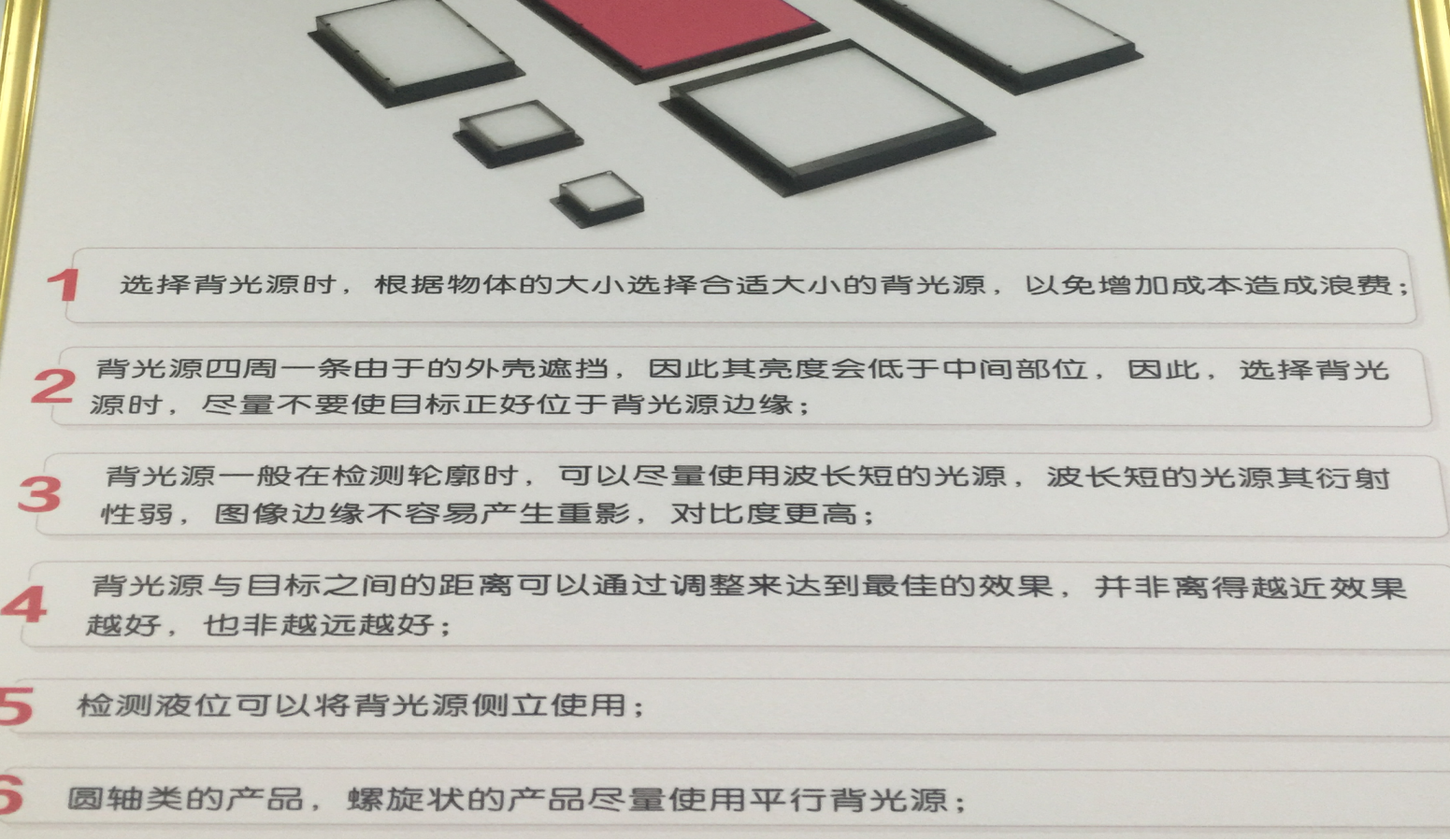
核心特性 :透射式打光 的核心光源,从被测物正后方 均匀打光,形成剪影效果 ,完全屏蔽被测物表面纹理/反光干扰。
发光形式 :方形/矩形/圆形面发光,发光面均匀性极高(常规>90%),分直下式和侧入式(导光板型),侧入式更薄(厚度<10mm)。
典型应用 :透明/半透明工件(玻璃、亚克力、晶圆)的轮廓检测、尺寸测量;薄片类工件(垫片、钢片、薄膜)的边缘提取;通孔/盲孔的有无检测;工件重叠/缺料检测(如连接器针脚缺失)。
核心优势 :被测物轮廓对比度拉满、无表面反光干扰、尺寸测量精度高,是轮廓/尺寸检测的首选光源。
3. 球面光源(穹顶光源/球积分光源)
核心特性 :无影打光 的专用光源,利用漫反射积分 原理实现360°均匀打光,彻底消除工件凹凸/曲面带来的阴影和局部反光。
发光形式 :球形/半球形内腔,内壁为高反光漫射涂层,光源从内腔侧壁/底部发光,经多次漫反射后从顶部出光口均匀射出,工件置于出光口正下方。
典型应用 :曲面/凹凸面工件(螺丝、螺母、五金件、塑胶异形件)的表面缺陷检测;金属高光件(轴承、齿轮、手机中框)的脏污/划痕检测;圆形工件的尺寸/缺陷检测;珠宝/精密零件的细节检测。
核心优势 :全域无影 、光照均匀性极高(>95%)、消除曲面/凹凸面的局部反光,是异形/曲面/金属高光件检测的核心光源。
4. 点光源
核心特性 :高亮度、小光斑、聚焦式 打光,属于局部精细检测 的专用光源,需配合聚光镜/导光管使用,控制光斑大小。
发光形式 :微小发光芯体(直径<5mm),出光为高亮度点光斑,发光角度极窄(可聚焦至<5°),支持光斑大小调节(通过聚光镜)。
典型应用 :微小工件的精细检测(芯片引脚、半导体晶粒、微型轴承);微孔/细缝检测(喷嘴微孔、喷油嘴孔径);微小条码/二维码识别(芯片封装码);激光打标后的精细字符识别。
核心优势 :亮度极高(远高于其他光源)、聚焦性好,可精准捕捉微小区域的细节特征,适配微纳级精密检测。
5. 同轴光源
核心特性 :抑制镜面反光 的专用光源,光线与相机光轴同轴 垂直射向被测物表面,仅接收工件表面的漫反射光,屏蔽镜面反射光。
发光形式 :由LED发光面、分光镜、漫射板 组成,光源从侧面发光,经分光镜90°反射后垂直射向工件,工件反射的漫射光经分光镜透射进入相机,镜面反射光则被反射回光源侧。
典型应用 :镜面/高反光平面工件(玻璃面板、金属镜面、液晶屏幕、晶圆)的表面缺陷/脏污检测;高反光件的字符/条码识别(金属件激光打码);玻璃上的丝印检测。
核心优势 :彻底抑制镜面高光反射,大幅提升高反光工件的图像对比度,是镜面/高反光平面检测的唯一优选光源。
6. 组合光源
核心特性 :定制化光源 ,由两种及以上基础光源(环形+同轴、条光+背光源、环形+点光源等)组合而成,适配多特征同时检测 的复杂场景。
发光形式 :根据检测需求组合发光结构,各光源模块可独立控光 (亮度、开关单独调节),实现多角度、多模式打光。
典型应用 :异形工件的多特征检测(如瓶盖:瓶口轮廓+表面logo+内螺纹缺陷,可采用环形光+同轴光 组合);连接器检测(针脚轮廓+表面脏污+引脚间距,可采用背光源+条光 组合);汽车零部件(如螺栓:头部曲面缺陷+螺杆尺寸,可采用球面光源+背光源 组合)。
核心优势 :一站式解决复杂多维度检测需求,无需多次更换光源,提升检测效率,适配定制化工业检测项目。
7. 环形光
核心特性 :环绕式打光 ,适配圆形/环形工件 的检测,可通过调整安装角度消除工件顶部/侧面的局部阴影。
发光形式 :环形发光结构,分单环/多环 (双色/多色)、正光(90°)/斜光(30°/45°/60°) 、低角度(15°)/高角度(75°) ,部分带漫射板,提升发光均匀性,可直接套在相机镜头外侧安装(镜头同轴)。
典型应用 :圆形工件(瓶盖、瓶口、轴承、透镜、LED灯珠)的缺陷/尺寸检测;电子元件(连接器、排针、焊盘)的检测;螺丝/螺母的头部缺陷/螺纹检测;瓶口密封面检测。
核心优势 :安装便捷(镜头同轴安装,节省空间)、环绕打光减少局部阴影、多角度/多色可选,是圆形/环形工件检测的主流光源。
快速选型速查(核心原则)
测量项目选型: 必须采用远心镜头或低畸变镜头配合背光源方案,确保尺寸测量精度。
波长选择原则: 优先选用短波长光源(如蓝光),因为短波光衍射效应弱,能更好保持物体边缘清晰度。长波光(如红光)衍射明显会导致边缘模糊。
| 检测需求/工件特性 | 首选光源 | 次选光源 |
|---|---|---|
| 平面工件常规检测 | 条光 | - |
| 轮廓/尺寸/透明件检测 | 背光源 | - |
| 曲面/凹凸面/金属高光件 | 球面光源 | 低角度环形光 |
| 微小区域精细检测 | 点光源 | 聚光条光 |
| 镜面/高反光平面检测 | 同轴光源 | - |
| 圆形/环形工件检测 | 环形光 | 球面光源 |
| 复杂多特征同时检测 | 组合光源 | 多光源搭配使用 |
互补光
互补色原理:色环上相对的两种颜色互为补色(如红-青,绿-品红,蓝-黄)。
反射规律:
同色光照射:物体对同色光反射强烈(红光照红物→高反)
补色光照射:物体对补色光吸收强烈(蓝光照红物→低反)
实际应用:检测红色包装袋上的黑色字符时,采用红光照射可使红色背景高反而字符保持低反,直接获得高对比度图像,避免后续复杂的图像增强处理。
常见工业视觉检测场景光源选型对照表
| 检测场景 | 核心检测目标 | 推荐光源类型 | 光源特性 & 优势 | 安装方式 | 色温/亮度建议 | 典型应用案例 |
|---|---|---|---|---|---|---|
| 微小元件尺寸测量 (如贴片电阻引脚、IC引脚) | 高精度测量引脚宽度、间距,边缘清晰无反光 | 环形无影光源 | 光线均匀柔和,360°环绕照明,消除元件边缘阴影,提升边缘检测精度 | 同轴安装(镜头与光源同轴) | 色温5000--6000K 亮度≥50000lux | 0402/0603贴片元件引脚检测、芯片引脚平整度检测 |
| 表面划痕/缺陷检测 (如玻璃面板、金属工件、塑料外壳) | 识别微米级划痕、凹坑、污渍 | 条形光源(多角度组合) | 斜射光线可增强划痕与表面的对比度,多角度组合覆盖全表面无盲区 | 斜向安装(与被测面夹角15°--45°) | 色温4500--5500K 亮度可调(根据划痕深浅) | 手机玻璃盖板划痕检测、汽车零部件表面缺陷检测 |
| 印刷字符/条码识别 (如包装喷码、PCB丝印、零件二维码) | 清晰读取字符/条码,避免反光模糊 | 背光源(透射式)/同轴光源 | 背光源:透射光线让字符形成黑色剪影,对比度极高 同轴光源:消除表面反光,适合光滑材质表面字符 | 背光源:被测物体后方 同轴光源:镜头同轴 | 色温5500K 亮度均匀(避免局部过曝) | 食品包装生产日期识别、PCB板条码读取、锂电池外壳喷码检测 |
| 大面积工件定位 (如板材、纸箱、汽车钣金件) | 快速定位工件轮廓,匹配视觉模板 | 面光源(大面积漫反射) | 发光面积大,光线均匀覆盖整个工件,无明显明暗差,适合大视野检测 | 被测物体上方(距离50--200mm) | 色温4000--5000K 亮度适中(避免高光反射) | 纸箱尺寸定位、钢板轮廓检测、汽车门板焊接定位 |
| 透明物体检测 (如玻璃瓶、亚克力件、薄膜) | 识别透明物体轮廓、内部气泡、杂质 | 平行背光源 | 光线平行度高,可清晰勾勒透明物体边缘,凸显内部缺陷,避免光线散射 | 被测物体后方(紧贴被测物) | 色温5000K 亮度高(穿透透明材质) | 玻璃瓶壁气泡检测、薄膜杂质识别、注射器针管缺陷检测 |
| 金属件缺陷检测 (如轴承、螺丝、冲压件) | 识别金属件裂纹、毛刺、变形 | 环形低角度光源 | 低角度光线照射金属表面,裂纹/毛刺处会形成明显阴影,与光滑表面形成强烈对比 | 斜向低角度安装(与被测面夹角≤15°) | 色温5500--6500K 亮度高(克服金属反光) | 轴承滚道裂纹检测、螺丝毛刺识别、冲压件变形检测 |
光源选型核心原则
- 对比度优先 :光源选型的核心是提升检测特征与背景的对比度,而非单纯提高亮度;
- 避免反光干扰 :光滑/金属表面优先选同轴光源、背光源,减少镜面反光;
- 同步触发 :光源需与相机同步触发,避免频闪导致的图像模糊;
- 寿命与防护 :工业场景优先选LED光源(寿命≥20000小时),防护等级≥IP65适配车间环境。
工业相机+光源 一体化选型需求表模板
填表说明:填写检测场景基础信息后,按参数验算逻辑推导数值,最终明确相机+光源的选型指标,可直接用于采购需求提报
| 模块 | 序号 | 字段名称 | 填写说明 | 示例(0402贴片电阻引脚检测) | 实际项目填写 |
|---|---|---|---|---|---|
| 一、基础场景信息 | 1 | 检测对象 | 明确被测物体名称、关键尺寸 | 0402贴片电阻引脚;引脚最小宽度0.05mm | |
| 2 | 核心检测需求 | 缺陷类型、精度要求、通过率目标 | 引脚宽度检测、缺角识别;检测精度≥99.5% | ||
| 3 | 流水线参数 | 运行速度、工件间距、视野覆盖数量 | 速度200mm/s;单视野覆盖10个元件 | ||
| 4 | 光源基础参数(新增) | 光源类型,需匹配检测特征(如引脚/表面缺陷) | 环形无影光源(适配微小元件引脚检测) | ||
| 5 | 光源色温(新增) | 影响色彩还原,工业检测优先4500--6500K | 5500K(白光,无色彩偏差) | ||
| 6 | 光源安装方式(新增) | 同轴/斜射/背光源,根据检测需求选择 | 同轴安装(避免引脚反光干扰) | ||
| 二、核心参数验算(推导过程) | 7 | 单像素精度 | 按「≤被测最小尺寸的1/2」设定 | 最大允许0.025mm/px | |
| 8 | 视野尺寸 | 计算单视野覆盖的长宽实际尺寸 | 宽度10mm(10个元件);长度5mm | ||
| 9 | 分辨率计算 | 水平像素=视野宽度÷单像素精度;垂直像素按比例 | 水平400px,垂直320px→12.8万像素 | ||
| 10 | 最小帧率 | 公式:(工件速度×单位时间工件数)÷视野长度 | (200×1)÷5=40fps | ||
| 11 | 最大曝光时间 | 公式:(单像素精度×1.2)÷工件速度 | (0.025×1.2)÷200=150μs | ||
| 12 | 带宽需求 | 公式:(分辨率×位深×帧率)÷(8×1024×1024) | (1600×1200×8×48)÷(8×1024×1024)=11.25MB/s | ||
| 13 | 光源亮度需求(新增) | 按曝光时间反推,弱曝光需高亮度 | 亮度≥50000lux(匹配100μs短曝光) | ||
| 三、相机+光源 最终选型指标 | 14 | 传感器分辨率 | 计算值基础上预留20%-50%冗余 | 200万像素(1600×1200) | |
| 15 | 帧率 | 计算值×1.2(冗余系数) | 48fps | ||
| 16 | 曝光时间范围 | 需≤最大曝光时间 | ≤150μs | ||
| 17 | 增益类型及范围 | 优先硬件增益,最大不超过20dB | 硬件增益0-15dB;禁用数字增益 | ||
| 18 | 传感器靶面 | 适配镜头视野,小靶面优先(工业场景) | 1/1.8″ | ||
| 19 | 镜头接口 | 工业通用接口,匹配镜头类型 | C口 | ||
| 20 | 输出接口 | 带宽≥计算值×1.5 | USB3.0/GigE | ||
| 21 | 白平衡模式 | 工业场景优先手动固定 | 手动固定(匹配5500K光源) | ||
| 22 | 光源具体型号类型(新增) | 明确光源规格,如环形/条形/背光源 | 环形无影光源 Φ50mm(内径Φ20mm) | ||
| 23 | 光源亮度调节方式(新增) | 手动/自动/软件调节,优先软件可控 | 软件无级调节(适配产线亮度波动) | ||
| 24 | 光源触发方式(新增) | 与相机同步触发,避免频闪 | 外部PLC触发(与相机曝光同步) | ||
| 25 | 光源防护等级(新增) | 匹配车间环境,如防尘/防水 | IP65(适配车间粉尘环境) | ||
| 26 | 光源供电方式(新增) | 直流/交流,优先低压直流 | DC24V(安全稳定,兼容产线电源) | ||
| 27 | 光源使用寿命(新增) | 工业场景优先≥20000小时 | ≥30000小时(LED光源) | ||
| 四、补充说明 | 28 | ROI裁剪需求 | 标注是否需要裁剪提升帧率 | 支持ROI,裁剪后帧率≥48fps | |
| 29 | 特殊环境要求 | 温度、湿度、振动等级 | 车间常温环境;温度0--40℃ | ||
| 30 | 选型备注 | 其他注意事项(如同步触发、兼容性) | 需支持外部触发;兼容产线PLC系统 |