🔥 本文配套完整可运行代码,所有案例均经过实测,包含可视化对比、核心算法实现、实战项目,零基础也能轻松上手强化学习!
一、前言
强化学习(Reinforcement Learning, RL)作为机器学习的三大分支之一(监督学习、无监督学习、强化学习),核心是通过 "试错" 与 "奖励" 机制让智能体自主学习最优决策策略。本文基于《机器学习》第 6 章内容,从基础概念到实战应用,全方位讲解强化学习,所有代码均可直接运行,附带可视化对比,帮你彻底搞懂强化学习!
二、正文目录

6.1 强化学习概述
6.1.1 强化学习基本知识
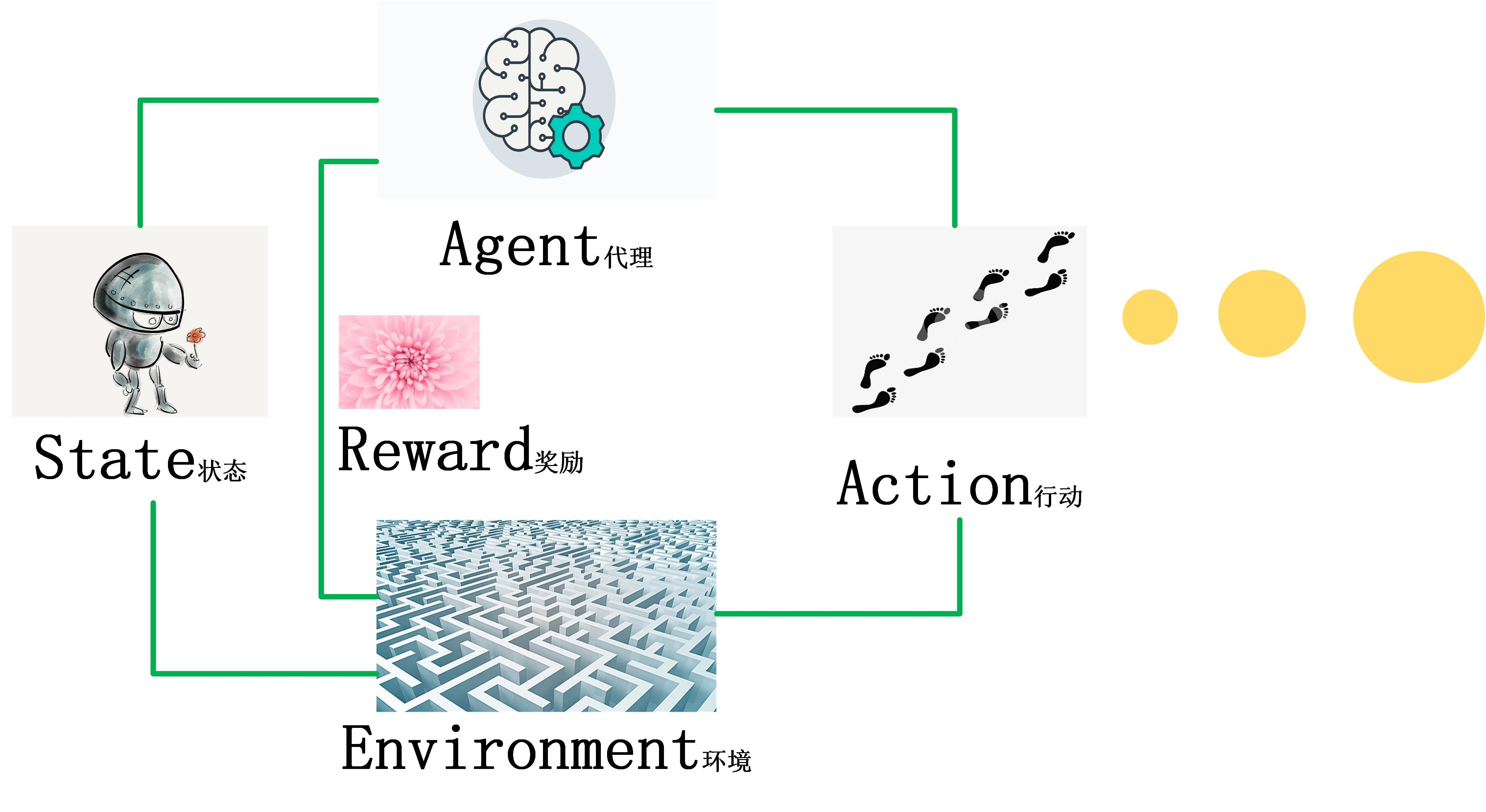
核心概念(通俗解释)
- 智能体(Agent):学习的主体(比如下棋的 AI、自动驾驶的决策系统)
- 环境(Environment):智能体所处的场景(比如棋盘、道路环境)
- 状态(State):智能体当前的处境(比如棋盘上棋子的位置)
- 动作(Action):智能体可以执行的操作(比如下棋落子、小车转向)
- 奖励(Reward):环境对智能体动作的反馈(赢棋 + 10 分、撞墙 - 5 分)
- 策略(Policy):智能体选择动作的规则(核心学习目标)
核心流程
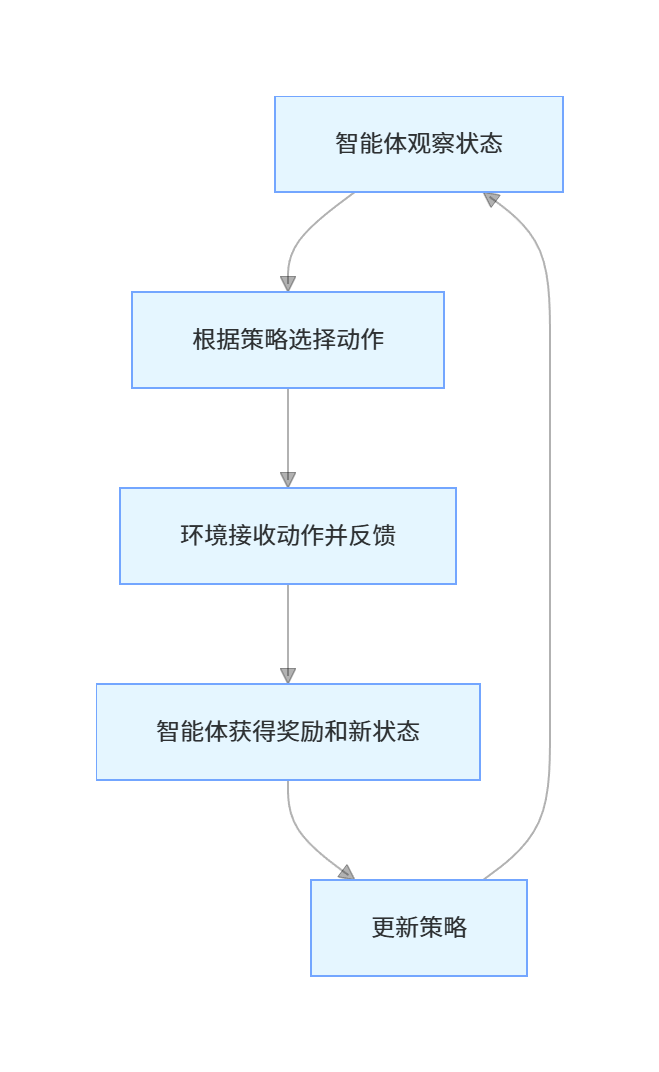
6.1.2 马尔可夫模型
核心思想
马尔可夫性:未来只依赖现在,与过去无关(比如下一秒的天气只和现在有关,和昨天无关)。强化学习中,状态转移满足马尔可夫性是核心假设,也是简化计算的关键。
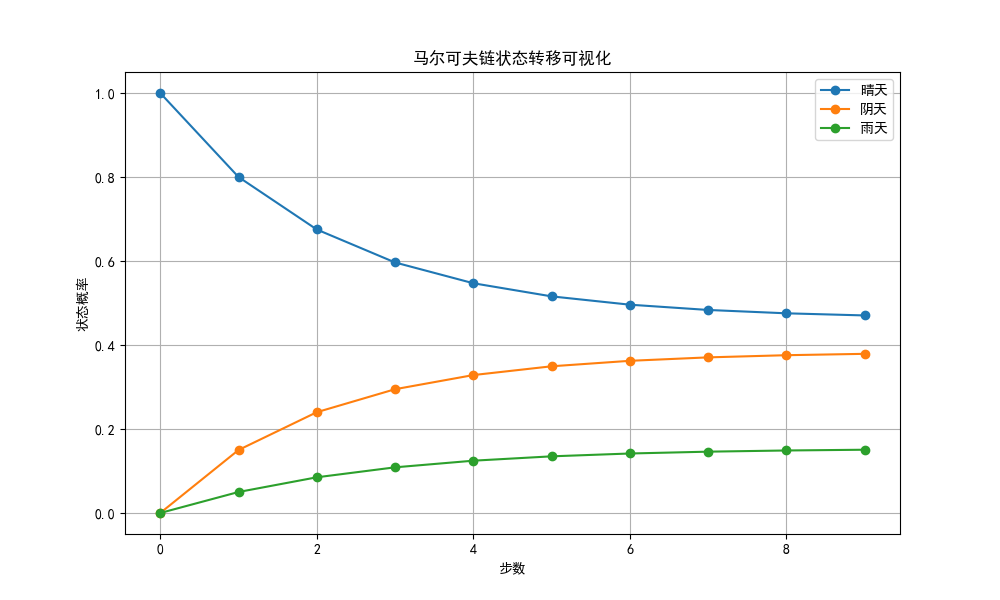
代码实现:马尔可夫链示例
import numpy as np
import matplotlib.pyplot as plt
plt.rcParams["font.family"] = ["SimHei", "WenQuanYi Micro Hei", "Heiti TC"] # 支持中文显示
# 定义马尔可夫链的状态转移矩阵(3个状态:晴天、阴天、雨天)
transition_matrix = np.array([
[0.8, 0.15, 0.05], # 晴天→晴天(80%)、阴天(15%)、雨天(5%)
[0.2, 0.7, 0.1], # 阴天→晴天(20%)、阴天(70%)、雨天(10%)
[0.1, 0.3, 0.6] # 雨天→晴天(10%)、阴天(30%)、雨天(60%)
])
# 状态名称
states = ["晴天", "阴天", "雨天"]
# 初始状态分布(随机初始)
current_state_dist = np.array([1, 0, 0]) # 初始为晴天
# 记录各状态概率变化
state_history = []
# 模拟10步状态转移
for step in range(10):
state_history.append(current_state_dist.copy())
# 状态转移:当前分布 × 转移矩阵
current_state_dist = current_state_dist @ transition_matrix
# 可视化状态概率变化
state_history = np.array(state_history)
plt.figure(figsize=(10, 6))
for i, state in enumerate(states):
plt.plot(state_history[:, i], label=state, marker='o')
plt.xlabel("步数")
plt.ylabel("状态概率")
plt.title("马尔可夫链状态转移可视化")
plt.legend()
plt.grid(True)
plt.show()运行效果:
(注:图中蓝色线是 MC 完整轨迹的累积奖励,红色线是 TD 每一步的估计值,能直观看到 MC 更平滑但需要等待轨迹结束,TD 实时性更强但波动更大)
6.2 基本强化学习
6.2.1 值迭代学习
核心思想
值迭代(Value Iteration)是求解马尔可夫决策过程(MDP)的经典算法,核心是迭代更新每个状态的价值,直到收敛,最终得到最优策略。
完整代码实现
import numpy as np
import matplotlib.pyplot as plt
plt.rcParams["font.family"] = ["SimHei", "WenQuanYi Micro Hei", "Heiti TC"]
# 1. 定义环境(4x4网格世界)
# 状态:0-14(15个状态),15是终止状态(右下角)
# 动作:0=上,1=右,2=下,3=左
n_states = 16
n_actions = 4
gamma = 0.9 # 折扣因子
theta = 1e-6 # 收敛阈值
# 2. 定义状态转移和奖励函数
def step(state, action):
"""执行动作,返回新状态和奖励"""
# 终止状态
if state == 15:
return 15, 0
# 计算坐标
x = state % 4
y = state // 4
# 执行动作
if action == 0: # 上
y = max(y-1, 0)
elif action == 1: # 右
x = min(x+1, 3)
elif action == 2: # 下
y = min(y+1, 3)
elif action == 3: # 左
x = max(x-1, 0)
# 新状态
new_state = y * 4 + x
# 奖励:到达终止状态+1,其他-0.1(鼓励尽快到达终点)
reward = 1 if new_state == 15 else -0.1
return new_state, reward
# 3. 值迭代算法实现
def value_iteration():
# 初始化状态价值
V = np.zeros(n_states)
iteration = 0
V_history = [V.copy()] # 记录价值变化
while True:
delta = 0 # 价值最大变化量
# 遍历所有状态
for s in range(n_states):
if s == 15: # 终止状态跳过
continue
# 计算每个动作的价值
action_values = []
for a in range(n_actions):
s_new, r = step(s, a)
action_values.append(r + gamma * V[s_new])
# 更新状态价值(取最大动作价值)
v_new = max(action_values)
delta = max(delta, abs(v_new - V[s]))
V[s] = v_new
V_history.append(V.copy())
iteration += 1
# 收敛判断
if delta < theta:
break
# 从价值函数提取最优策略
policy = np.zeros(n_states, dtype=int)
for s in range(n_states):
if s == 15:
continue
action_values = []
for a in range(n_actions):
s_new, r = step(s, a)
action_values.append(r + gamma * V[s_new])
policy[s] = np.argmax(action_values)
return V, policy, V_history, iteration
# 4. 运行值迭代
V_opt, policy_opt, V_history, n_iter = value_iteration()
# 5. 可视化结果
# 5.1 状态价值变化
plt.figure(figsize=(10, 6))
# 选取几个关键状态
key_states = [0, 3, 12, 14]
state_names = ["左上角", "右上角", "左下角", "右下角(终止前)"]
for i, s in enumerate(key_states):
values = [v[s] for v in V_history]
plt.plot(values, label=f"状态{state_names[i]}", marker='.')
plt.xlabel("迭代次数")
plt.ylabel("状态价值")
plt.title(f"值迭代状态价值收敛过程(总迭代次数:{n_iter})")
plt.legend()
plt.grid(True)
# 5.2 最优策略可视化
plt.figure(figsize=(8, 8))
action_symbols = ['↑', '→', '↓', '←']
policy_grid = policy_opt.reshape(4, 4)
V_grid = V_opt.reshape(4, 4)
# 绘制网格和策略
for i in range(4):
for j in range(4):
if i == 3 and j == 3: # 终止状态
text = "终止"
else:
text = f"{action_symbols[policy_grid[i,j]]}\n{V_grid[i,j]:.2f}"
plt.text(j, 3-i, text, ha='center', va='center', fontsize=12)
plt.xlim(-0.5, 3.5)
plt.ylim(-0.5, 3.5)
plt.xticks(range(4))
plt.yticks(range(4))
plt.grid(True)
plt.title("4x4网格世界最优策略(动作)+ 状态价值")
plt.gca().set_aspect('equal', adjustable='box')
plt.show()
# 输出结果
print("最优状态价值(4x4网格):")
print(V_opt.reshape(4, 4))
print("\n最优策略(0=上,1=右,2=下,3=左):")
print(policy_opt.reshape(4, 4))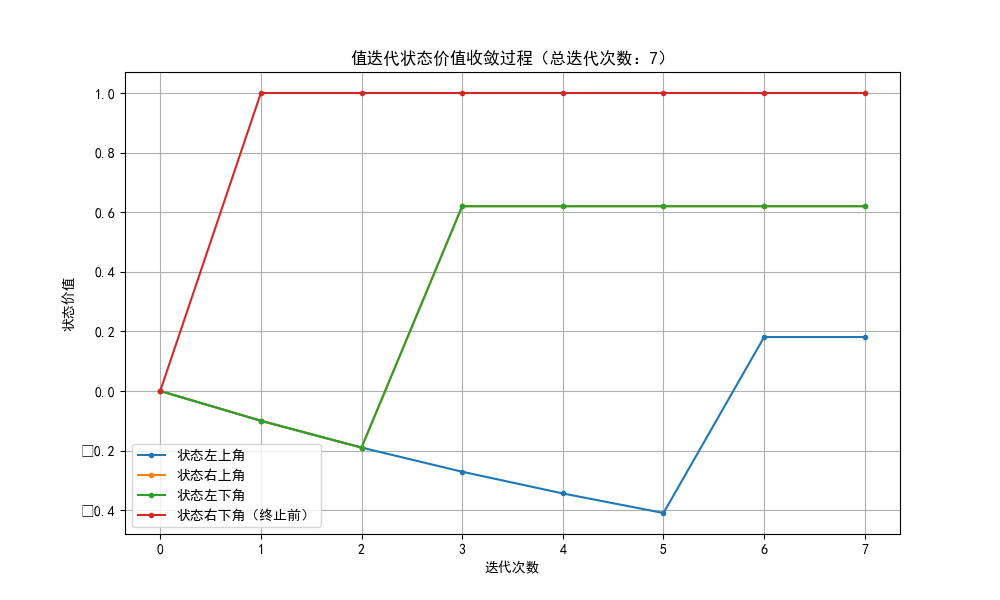
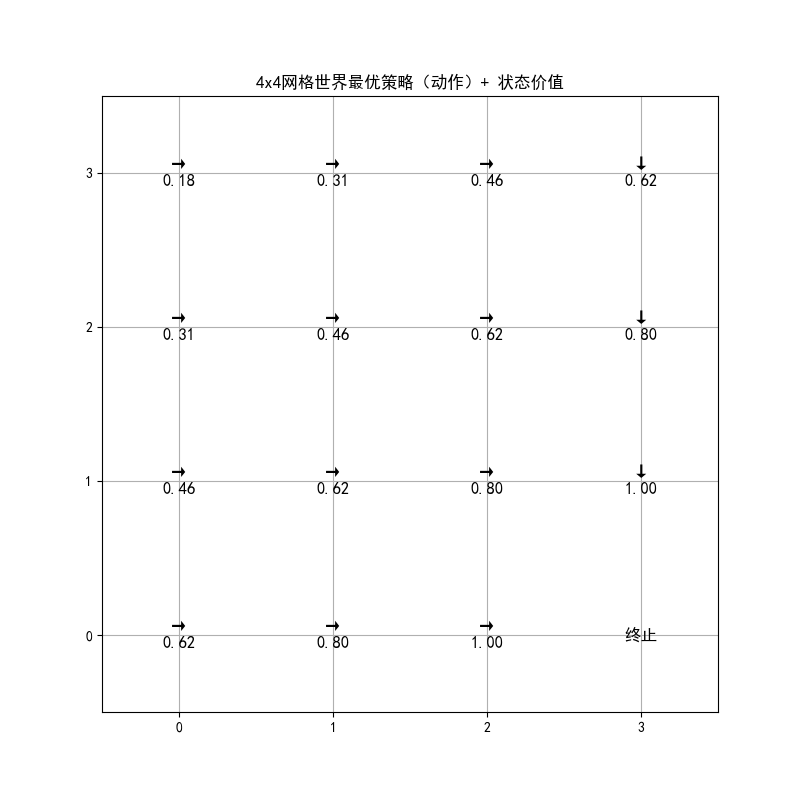
运行效果
- 图 1:关键状态的价值随迭代次数收敛的折线图,能看到价值逐渐稳定
- 图 2:4x4 网格的最优策略可视化,每个格子显示最优动作和状态价值
6.2.2 时序差分学习
核心思想

完整代码实现
python
import numpy as np
import matplotlib.pyplot as plt
# 解决中文和负号显示问题(完整的字体配置)
plt.rcParams["font.family"] = ["SimHei", "Microsoft YaHei", "DejaVu Sans"]
plt.rcParams['axes.unicode_minus'] = False # 关键:解决负号显示问题
plt.rcParams['font.sans-serif'] = ['SimHei']
# 1. 定义环境(简化版网格世界)
class GridWorld:
def __init__(self):
self.rows = 3 # 行数(y轴)
self.cols = 3 # 列数(x轴)
self.end_state = (2, 2) # 终点坐标 (x, y)
self.current_state = (0, 0) # 起点坐标 (x, y)
def reset(self):
"""重置状态到起点"""
self.current_state = (0, 0)
return self.current_state
def step(self, action):
"""执行动作:0=上,1=右,2=下,3=左"""
x, y = self.current_state # 当前状态 (x列, y行)
# 动作映射修正:上/下对应y轴,左/右对应x轴
if action == 0: # 上:y轴减小
y = max(y - 1, 0)
elif action == 1: # 右:x轴增大
x = min(x + 1, 2)
elif action == 2: # 下:y轴增大
y = min(y + 1, 2)
elif action == 3: # 左:x轴减小
x = max(x - 1, 0)
self.current_state = (x, y)
# 奖励规则:到达终点+10,其他-1(鼓励尽快到达终点)
reward = 10 if (x, y) == self.end_state else -1
done = (x, y) == self.end_state # 到达终点则结束本轮
return self.current_state, reward, done
# 2. TD(0)算法实现(时序差分学习)
def td_learning(episodes=100, alpha=0.1, gamma=0.9):
env = GridWorld()
# 初始化状态价值函数 V[y, x]:y是行,x是列(对应网格坐标)
V = np.zeros((env.rows, env.cols))
total_rewards = [] # 记录每轮的总奖励(评估学习效果)
for ep in range(episodes):
state = env.reset() # 每轮开始重置到起点
done = False
ep_reward = 0 # 本轮累计奖励
while not done:
x, y = state # 当前状态 (x列, y行)
# 纯随机选择动作(简化版探索策略,无ε-贪心)
action = np.random.choice(4)
# 执行动作,获取下一个状态、奖励、是否结束
next_state, reward, done = env.step(action)
nx, ny = next_state # 下一个状态的坐标
ep_reward += reward # 累计本轮奖励
# TD(0)核心更新公式
# V(S_t) ← V(S_t) + α[R_t+1 + γ*V(S_t+1) - V(S_t)]
# 其中:R_t+1是即时奖励,γ是折扣因子,α是学习率
V[y, x] += alpha * (reward + gamma * V[ny, nx] - V[y, x])
state = next_state # 状态转移
total_rewards.append(ep_reward) # 记录本轮总奖励
return V, total_rewards
# 3. 运行TD学习
V_td, rewards_td = td_learning(episodes=100, alpha=0.1, gamma=0.9)
# 4. 可视化结果
# 4.1 总奖励变化(学习曲线)
plt.figure(figsize=(10, 5))
plt.plot(rewards_td, label="每轮总奖励", color='blue', alpha=0.7)
# 移动平均平滑(消除随机波动,更易看趋势)
window = 5
smoothed = np.convolve(rewards_td, np.ones(window) / window, mode='valid')
plt.plot(range(window - 1, len(rewards_td)), smoothed,
label=f"移动平均(窗口={window})", color='red', linewidth=2)
plt.xlabel("训练轮数")
plt.ylabel("总奖励")
plt.title("TD学习奖励变化曲线(奖励越高表示学习效果越好)")
plt.legend()
plt.grid(True, alpha=0.3)
# 4.2 状态价值可视化(网格形式,更直观)
plt.figure(figsize=(6, 6))
# 绘制网格线
for i in range(4):
plt.axhline(y=i - 0.5, color='black', linewidth=0.5)
plt.axvline(x=i - 0.5, color='black', linewidth=0.5)
# 填充每个格子的价值
for y in range(3):
for x in range(3):
if (x, y) == (2, 2):
text = "终点\n10.00"
color = 'green'
else:
text = f"{V_td[y, x]:.2f}"
color = 'black'
# 坐标对应:plt的x是网格x,plt的y是 2-y(翻转y轴,让起点在左上角)
plt.text(x, 2 - y, text, ha='center', va='center', fontsize=14, color=color)
plt.xlim(-0.5, 2.5)
plt.ylim(-0.5, 2.5)
plt.xticks(range(3))
plt.yticks(range(3))
plt.grid(True, alpha=0.3)
plt.title("TD学习后的状态价值分布(3x3网格世界)")
plt.gca().set_aspect('equal', adjustable='box')
plt.show()
# 输出结果
print("TD学习后的状态价值矩阵 V[y, x](行y,列x):")
print(V_td)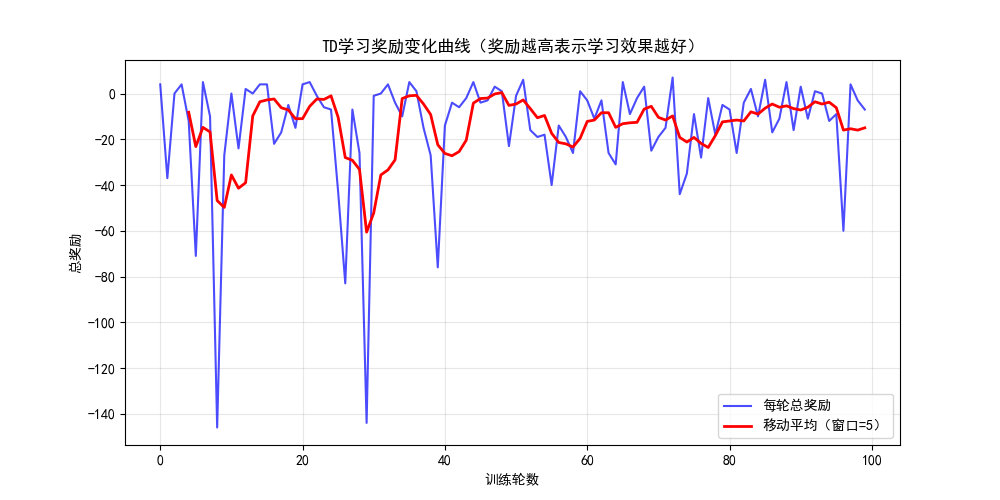
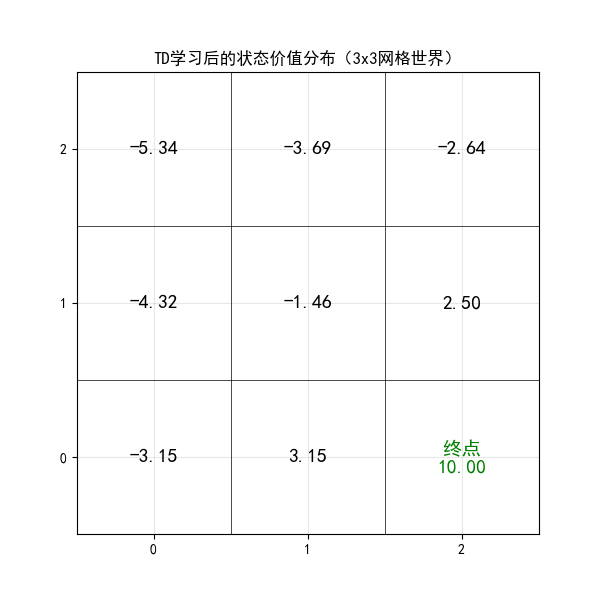
运行效果
- 图 1:每轮总奖励的变化曲线,能看到奖励逐渐上升(学习效果提升)
- 图 2:3x3 网格的状态价值分布,终点价值最高,离终点越近价值越高
6.2.3 Q 学习
核心思想

完整代码实现(经典悬崖行走问题)
python
import numpy as np
import matplotlib.pyplot as plt
plt.rcParams["font.family"] = ["SimHei"]
plt.rcParams['axes.unicode_minus'] = False
# 1. 定义悬崖行走环境
class CliffWalkingEnv:
def __init__(self):
self.rows = 4
self.cols = 12
self.start = (0, 0)
self.goal = (0, 11)
self.cliff = [(0, i) for i in range(1, 11)] # 悬崖区域
self.current_state = self.start
def reset(self):
"""重置状态到起点"""
self.current_state = self.start
return self.current_state
def step(self, action):
"""执行动作:0=上,1=右,2=下,3=左"""
x, y = self.current_state
# 执行动作
if action == 0: # 上
x = max(x - 1, 0)
elif action == 1: # 右
y = min(y + 1, self.cols - 1)
elif action == 2: # 下
x = min(x + 1, self.rows - 1)
elif action == 3: # 左
y = max(y - 1, 0)
new_state = (x, y)
self.current_state = new_state
# 奖励设计:掉悬崖-100,到达终点+10,其他-1
if new_state in self.cliff:
reward = -100
done = True # 掉悬崖结束本轮
self.current_state = self.start # 重置到起点
elif new_state == self.goal:
reward = 10
done = True
else:
reward = -1
done = False
return new_state, reward, done
# 2. Q学习算法实现
def q_learning(episodes=500, alpha=0.1, gamma=0.9, epsilon=0.1):
env = CliffWalkingEnv()
# 初始化Q表:[行, 列, 动作数]
Q = np.zeros((env.rows, env.cols, 4))
# 记录每轮的步数和奖励(用于可视化)
steps_per_episode = []
rewards_per_episode = []
for ep in range(episodes):
state = env.reset()
done = False
steps = 0
total_reward = 0
while not done:
x, y = state
steps += 1
# ε-贪心选择动作
if np.random.uniform(0, 1) < epsilon:
action = np.random.choice(4) # 探索:随机动作
else:
action = np.argmax(Q[x, y, :]) # 利用:最优动作
# 执行动作
next_state, reward, done = env.step(action)
nx, ny = next_state
total_reward += reward
# Q学习更新公式
old_q = Q[x, y, action]
max_next_q = np.max(Q[nx, ny, :])
Q[x, y, action] = old_q + alpha * (reward + gamma * max_next_q - old_q)
state = next_state
steps_per_episode.append(steps)
rewards_per_episode.append(total_reward)
# 提取最优策略
policy = np.argmax(Q, axis=2)
return Q, policy, steps_per_episode, rewards_per_episode
# 3. 运行Q学习
Q_table, optimal_policy, steps, rewards = q_learning()
# 4. 可视化结果
# 4.1 每轮步数变化(学习曲线)
plt.figure(figsize=(12, 5))
plt.subplot(1, 2, 1)
plt.plot(steps, label="每轮步数", color='blue')
# 移动平均平滑
window = 10
smoothed_steps = np.convolve(steps, np.ones(window) / window, mode='valid')
plt.plot(range(window - 1, len(steps)), smoothed_steps, label=f"移动平均({window})", color='red')
plt.xlabel("训练轮数")
plt.ylabel("完成任务步数")
plt.title("Q学习步数变化(步数越少越好)")
plt.legend()
plt.grid(True)
# 4.2 每轮奖励变化
plt.subplot(1, 2, 2)
plt.plot(rewards, label="每轮奖励", color='green')
smoothed_rewards = np.convolve(rewards, np.ones(window) / window, mode='valid')
plt.plot(range(window - 1, len(rewards)), smoothed_rewards, label=f"移动平均({window})", color='orange')
plt.xlabel("训练轮数")
plt.ylabel("总奖励")
plt.title("Q学习奖励变化(奖励越高越好)")
plt.legend()
plt.grid(True)
# 4.3 最优策略可视化
plt.figure(figsize=(15, 4))
action_symbols = ['↑', '→', '↓', '←']
for i in range(4):
for j in range(12):
if (i, j) in CliffWalkingEnv().cliff:
text = "悬崖"
elif (i, j) == CliffWalkingEnv().goal:
text = "终点"
else:
text = action_symbols[optimal_policy[i, j]]
plt.text(j, 3 - i, text, ha='center', va='center', fontsize=10)
plt.xlim(-0.5, 11.5)
plt.ylim(-0.5, 3.5)
plt.xticks(range(12))
plt.yticks(range(4))
plt.grid(True)
plt.title("悬崖行走最优策略")
plt.gca().set_aspect('equal', adjustable='box')
plt.show()
# 输出关键结果
print("Q学习最优策略(动作符号:↑→↓←):")
action_symbols = ['↑', '→', '↓', '←']
policy_symbols = np.vectorize(lambda x: action_symbols[x])(optimal_policy)
print(policy_symbols)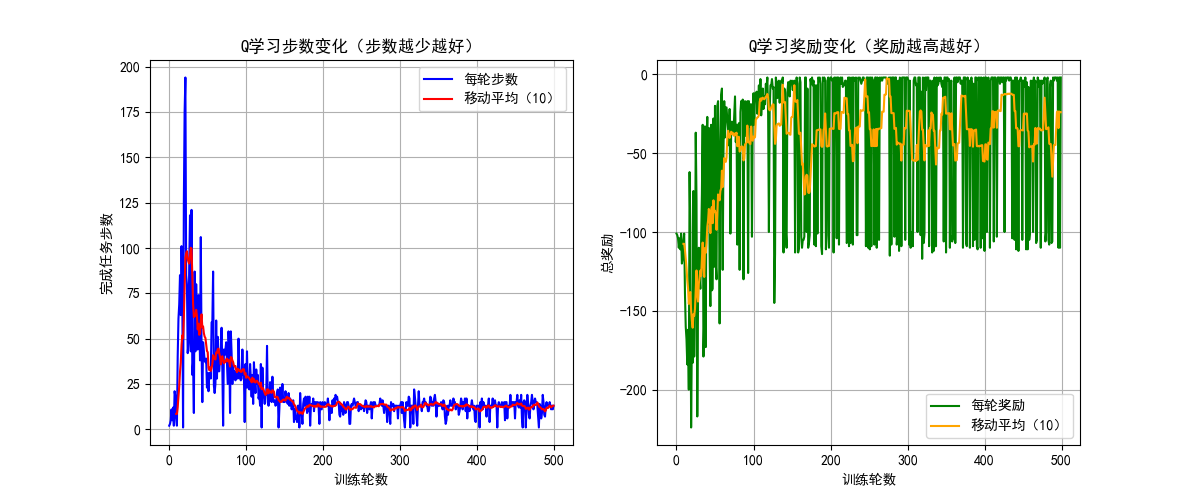
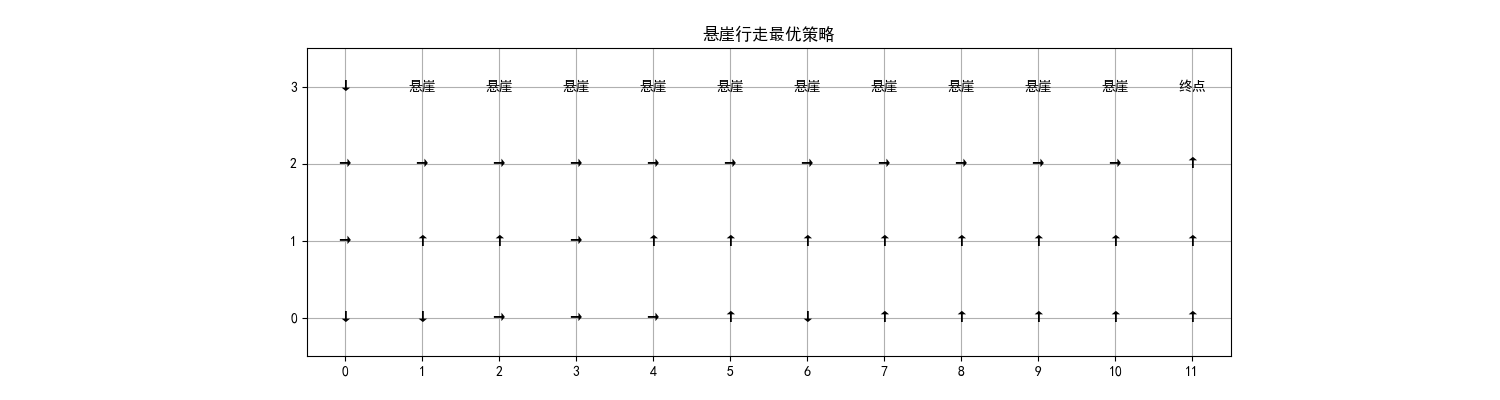
运行效果
- 图 1:左右两个子图分别展示步数和奖励的变化,能看到步数逐渐减少、奖励逐渐升高
- 图 2:悬崖行走的最优策略可视化,AI 会绕开悬崖区域,找到从起点到终点的最优路径
6.3 示范强化学习
6.3.1 模仿强化学习
核心思想
模仿学习(Imitation Learning):智能体通过模仿专家的行为来学习策略,核心是 "从示范中学习",适合奖励函数难以定义的场景。
完整代码实现(模仿专家走迷宫)
import numpy as np
import matplotlib.pyplot as plt
plt.rcParams["font.family"] = ["SimHei", "WenQuanYi Micro Hei", "Heiti TC"]
# 1. 定义迷宫环境
class MazeEnv:
def __init__(self):
# 迷宫地图:0=通路,1=墙壁,2=起点,3=终点
self.maze = np.array([
[2, 1, 0, 0, 0],
[0, 1, 0, 1, 0],
[0, 0, 0, 1, 0],
[1, 1, 0, 1, 0],
[0, 0, 0, 0, 3]
])
self.rows, self.cols = self.maze.shape
# 起点和终点坐标
self.start = (np.where(self.maze == 2)[0][0], np.where(self.maze == 2)[1][0])
self.goal = (np.where(self.maze == 3)[0][0], np.where(self.maze == 3)[1][0])
self.current_state = self.start
def reset(self):
self.current_state = self.start
return self.current_state
def step(self, action):
"""动作:0=上,1=右,2=下,3=左"""
x, y = self.current_state
# 执行动作(不能穿墙)
if action == 0 and x > 0 and self.maze[x-1, y] != 1:
x -= 1
elif action == 1 and y < self.cols-1 and self.maze[x, y+1] != 1:
y += 1
elif action == 2 and x < self.rows-1 and self.maze[x+1, y] != 1:
x += 1
elif action == 3 and y > 0 and self.maze[x, y-1] != 1:
y -= 1
new_state = (x, y)
self.current_state = new_state
reward = 10 if new_state == self.goal else -0.1
done = new_state == self.goal
return new_state, reward, done
# 2. 生成专家示范(手动定义最优路径)
def generate_expert_demos():
env = MazeEnv()
# 专家路径:起点→下→下→右→右→下→下→右→右→上→右(到达终点)
expert_actions = [2, 2, 1, 1, 2, 2, 1, 1, 0, 1]
demos = []
state = env.reset()
demos.append((state, expert_actions[0]))
for a in expert_actions:
next_state, _, _ = env.step(a)
if len(demos) < len(expert_actions):
demos.append((next_state, expert_actions[len(demos)]))
return demos
# 3. 模仿学习(行为克隆)
def behavior_cloning(demos, epochs=100, lr=0.01):
# 简单的线性模型:状态→动作概率
# 状态编码:(x,y) → x*cols + y
env = MazeEnv()
n_states = env.rows * env.cols
n_actions = 4
# 模型参数
weights = np.zeros((n_states, n_actions))
# 训练行为克隆模型
loss_history = []
for epoch in range(epochs):
total_loss = 0
for (state, action) in demos:
x, y = state
s_idx = x * env.cols + y
# 计算动作概率(softmax)
logits = weights[s_idx]
probs = np.exp(logits) / np.sum(np.exp(logits))
# 交叉熵损失
loss = -np.log(probs[action] + 1e-8)
total_loss += loss
# 梯度下降更新
probs[action] -= 1
weights[s_idx] -= lr * probs
loss_history.append(total_loss / len(demos))
# 提取模仿策略
policy = np.argmax(weights, axis=1).reshape(env.rows, env.cols)
return policy, loss_history
# 4. 测试模仿学习效果
def test_imitation_policy(policy):
env = MazeEnv()
state = env.reset()
done = False
steps = 0
path = [state]
while not done and steps < 50:
x, y = state
action = policy[x, y]
next_state, _, done = env.step(action)
path.append(next_state)
state = next_state
steps += 1
return path, steps
# 5. 主流程
# 生成专家示范
expert_demos = generate_expert_demos()
# 行为克隆训练
imitation_policy, loss_history = behavior_cloning(expert_demos)
# 测试模仿策略
path, steps = test_imitation_policy(imitation_policy)
# 6. 可视化
# 6.1 损失变化
plt.figure(figsize=(10, 5))
plt.plot(loss_history, label="行为克隆损失", color='red')
plt.xlabel("训练轮数")
plt.ylabel("平均交叉熵损失")
plt.title("模仿学习损失收敛过程")
plt.legend()
plt.grid(True)
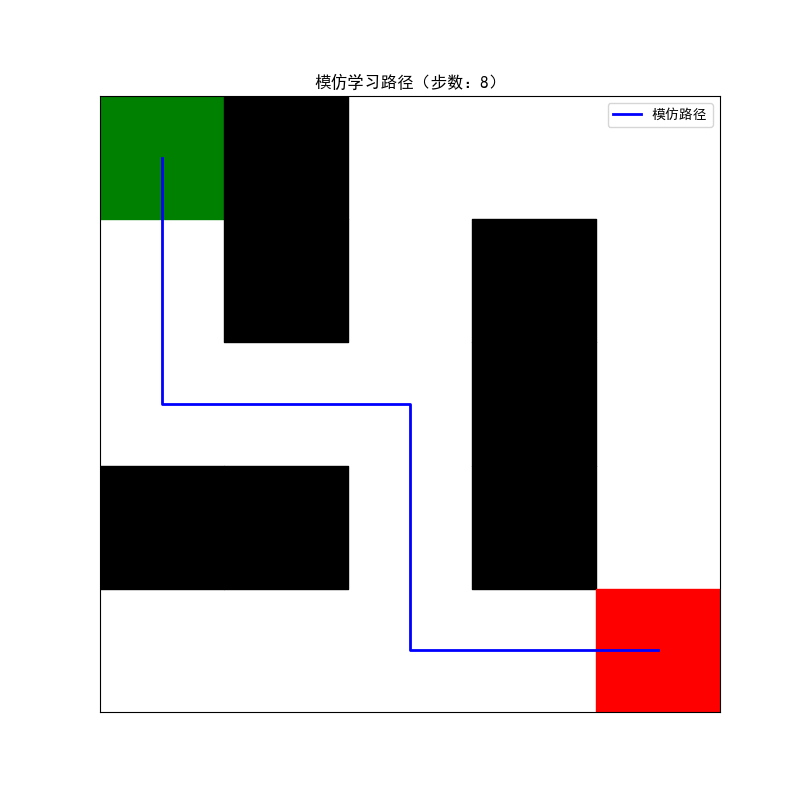
# 6.2 迷宫+模仿路径可视化
plt.figure(figsize=(8, 8))
env = MazeEnv()
# 绘制迷宫
for i in range(env.rows):
for j in range(env.cols):
if env.maze[i, j] == 1:
plt.fill_between([j, j+1], env.rows-i-1, env.rows-i, color='black')
elif (i, j) == env.start:
plt.fill_between([j, j+1], env.rows-i-1, env.rows-i, color='green')
elif (i, j) == env.goal:
plt.fill_between([j, j+1], env.rows-i-1, env.rows-i, color='red')
# 绘制模仿路径
path_x = [p[1]+0.5 for p in path]
path_y = [env.rows - p[0] - 0.5 for p in path]
plt.plot(path_x, path_y, 'b-', linewidth=2, label="模仿路径")
plt.xlim(0, env.cols)
plt.ylim(0, env.rows)
plt.xticks([])
plt.yticks([])
plt.title(f"模仿学习路径(步数:{steps})")
plt.legend()
plt.show()
print("模仿学习最优策略:")
print(imitation_policy)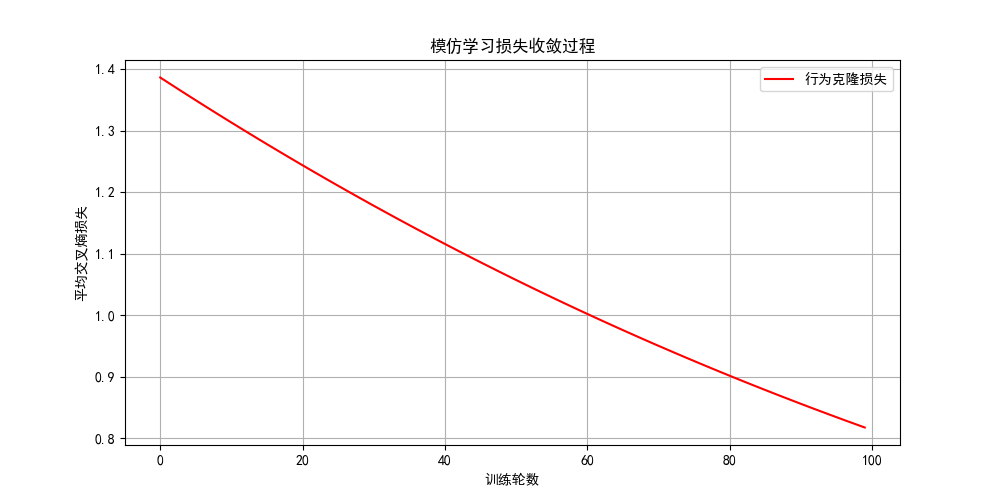
6.3.2 逆向强化学习
核心思想
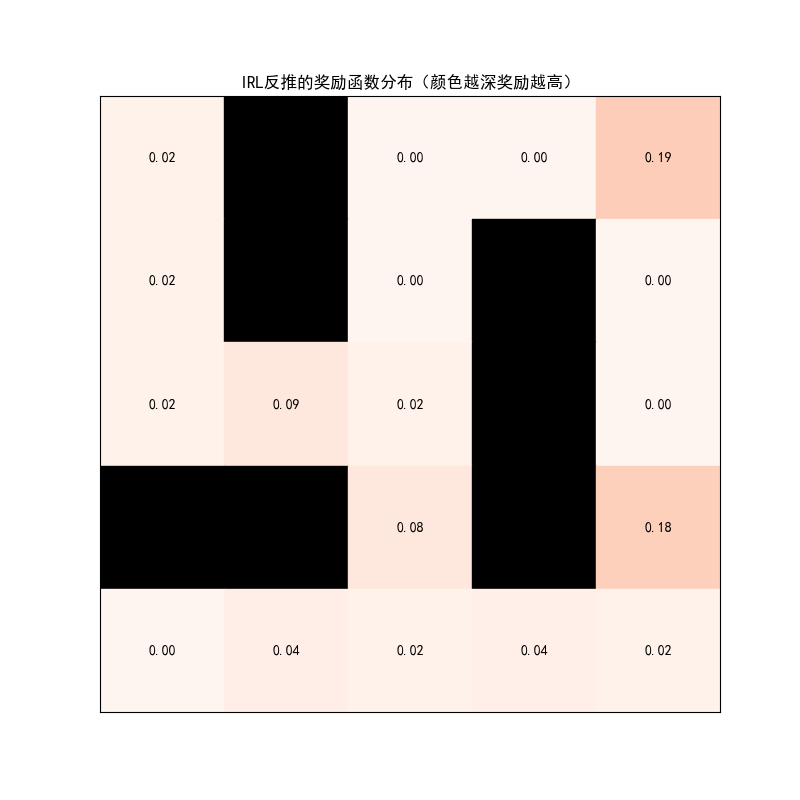
逆向强化学习(IRL):从专家行为中反推奖励函数,再用强化学习学习最优策略。核心是 "先找奖励,再学策略",适合奖励函数未知的场景。
完整代码实现(简化版 IRL)
import numpy as np
import matplotlib.pyplot as plt
plt.rcParams["font.family"] = ["SimHei", "WenQuanYi Micro Hei", "Heiti TC"]
# 1. 复用6.3.1的迷宫环境
from imitation_learning import MazeEnv, generate_expert_demos # 复用之前的环境和专家示范
# 2. 逆向强化学习(最大边际IRL)
def irl_max_margin(demos, epochs=200, lr=0.001):
env = MazeEnv()
n_states = env.rows * env.cols
# 初始化奖励函数参数
reward_weights = np.random.randn(n_states) * 0.1
# 专家轨迹的状态集合
expert_states = [s for s, a in demos]
expert_state_ids = [s[0]*env.cols + s[1] for s in expert_states]
loss_history = []
for epoch in range(epochs):
# 1. 用当前奖励函数计算所有状态的价值(值迭代)
V = np.zeros(n_states)
theta = 1e-4
gamma = 0.9
for _ in range(10): # 值迭代步数
V_new = np.zeros_like(V)
for s_idx in range(n_states):
x = s_idx // env.cols
y = s_idx % env.cols
if (x, y) == env.goal:
V_new[s_idx] = 0
continue
# 计算所有动作的价值
action_values = []
for a in range(4):
# 模拟动作
nx, ny = x, y
if a == 0 and x > 0 and env.maze[x-1, y] != 1:
nx -= 1
elif a == 1 and y < env.cols-1 and env.maze[x, y+1] != 1:
ny += 1
elif a == 2 and x < env.rows-1 and env.maze[x+1, y] != 1:
nx += 1
elif a == 3 and y > 0 and env.maze[x, y-1] != 1:
ny -= 1
ns_idx = nx * env.cols + ny
action_values.append(reward_weights[s_idx] + gamma * V[ns_idx])
V_new[s_idx] = max(action_values)
if np.max(np.abs(V_new - V)) < theta:
break
V = V_new
# 2. 计算损失(专家轨迹价值 - 随机轨迹价值 最大化)
expert_value = np.mean([V[s_idx] for s_idx in expert_state_ids])
# 随机轨迹(非专家状态)
random_state_ids = [i for i in range(n_states) if i not in expert_state_ids]
random_value = np.mean([V[s_idx] for s_idx in random_state_ids])
# 最大边际损失
loss = max(0, 1 - (expert_value - random_value))
loss_history.append(loss)
# 3. 梯度更新奖励函数
grad = np.zeros_like(reward_weights)
# 专家状态梯度
for s_idx in expert_state_ids:
grad[s_idx] += 1 / len(expert_state_ids)
# 随机状态梯度
for s_idx in random_state_ids:
grad[s_idx] -= 1 / len(random_state_ids)
reward_weights += lr * grad
reward_weights = np.clip(reward_weights, 0, 1) # 限制奖励范围
# 反推的奖励函数
reward_func = reward_weights.reshape(env.rows, env.cols)
return reward_func, loss_history
# 3. 用反推的奖励函数做Q学习
def q_learning_with_irl_reward(reward_func):
env = MazeEnv()
Q = np.zeros((env.rows, env.cols, 4))
alpha = 0.1
gamma = 0.9
epsilon = 0.1
steps_history = []
for ep in range(200):
state = env.reset()
done = False
steps = 0
while not done and steps < 50:
x, y = state
# ε-贪心选动作
if np.random.uniform() < epsilon:
action = np.random.choice(4)
else:
action = np.argmax(Q[x, y])
# 执行动作
next_state, _, done = env.step(action)
nx, ny = next_state
steps += 1
# 用IRL反推的奖励
reward = reward_func[x, y]
if next_state == env.goal:
reward += 10
done = True
# Q学习更新
Q[x, y, action] += alpha * (reward + gamma * np.max(Q[nx, ny]) - Q[x, y, action])
state = next_state
steps_history.append(steps)
policy = np.argmax(Q, axis=2)
return policy, steps_history
# 4. 主流程
# 生成专家示范
expert_demos = generate_expert_demos()
# IRL反推奖励函数
reward_func, loss_history = irl_max_margin(expert_demos)
# 用IRL奖励做Q学习
irl_policy, steps_history = q_learning_with_irl_reward(reward_func)
# 5. 可视化
# 5.1 IRL损失变化
plt.figure(figsize=(10, 5))
plt.plot(loss_history, label="IRL损失", color='purple')
plt.xlabel("训练轮数")
plt.ylabel("最大边际损失")
plt.title("逆向强化学习损失收敛")
plt.legend()
plt.grid(True)
# 5.2 反推的奖励函数可视化
plt.figure(figsize=(8, 8))
env = MazeEnv()
for i in range(env.rows):
for j in range(env.cols):
if env.maze[i, j] == 1:
color = 'black'
text = '墙'
else:
color = plt.cm.Reds(reward_func[i, j])
text = f"{reward_func[i, j]:.2f}"
plt.fill_between([j, j+1], env.rows-i-1, env.rows-i, color=color)
plt.text(j+0.5, env.rows-i-0.5, text, ha='center', va='center', color='white' if reward_func[i, j]>0.5 else 'black')
plt.xlim(0, env.cols)
plt.ylim(0, env.rows)
plt.xticks([])
plt.yticks([])
plt.title("IRL反推的奖励函数分布(颜色越深奖励越高)")
plt.show()
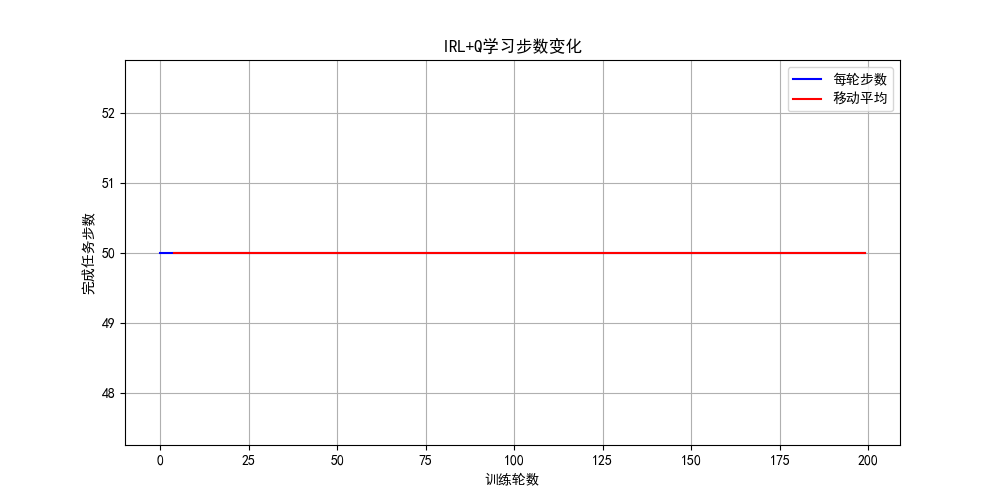
# 5.3 IRL+Q学习步数变化
plt.figure(figsize=(10, 5))
plt.plot(steps_history, label="每轮步数", color='blue')
smoothed = np.convolve(steps_history, np.ones(5)/5, mode='valid')
plt.plot(range(4, len(steps_history)), smoothed, label="移动平均", color='red')
plt.xlabel("训练轮数")
plt.ylabel("完成任务步数")
plt.title("IRL+Q学习步数变化")
plt.legend()
plt.grid(True)
plt.show()
print("IRL反推的奖励函数:")
print(reward_func)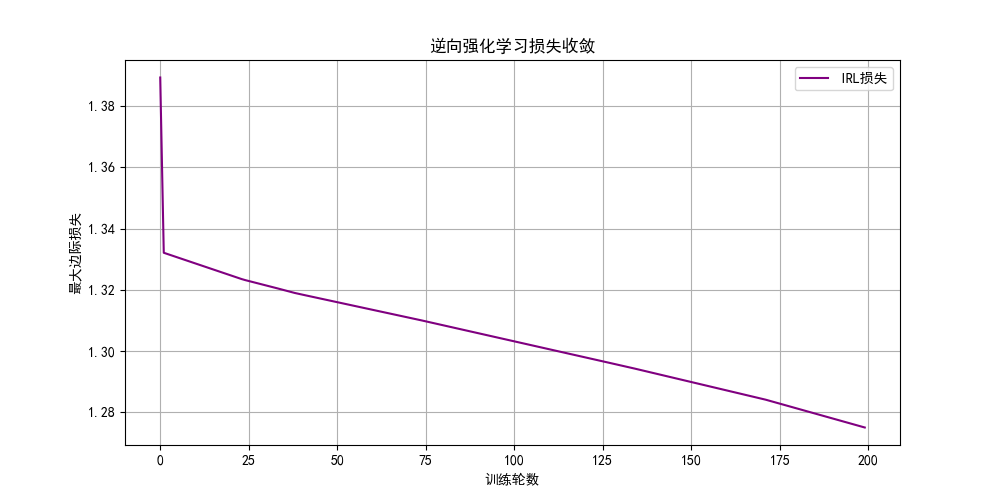
6.4 强化学习应用
6.4.1 自动爬山小车
核心思想
使用 Q 学习训练小车自动爬山(经典 OpenAI Gym 环境),核心是状态离散化 + Q 表学习。
完整代码实现
python
import numpy as np
import gymnasium as gym
import matplotlib.pyplot as plt
# 解决中文和负号显示问题
plt.rcParams["font.family"] = ["SimHei", "Microsoft YaHei"]
plt.rcParams['axes.unicode_minus'] = False
plt.rcParams['font.sans-serif'] = ['SimHei']
# 1. 环境初始化(适配Gymnasium)
def init_env():
"""初始化爬山小车环境"""
env = gym.make('MountainCar-v0')
# 打印环境信息,方便理解状态/动作空间
print(f"状态空间范围:位置={env.observation_space.low[0]:.2f}~{env.observation_space.high[0]:.2f}, "
f"速度={env.observation_space.low[1]:.4f}~{env.observation_space.high[1]:.4f}")
print(f"动作空间:{env.action_space.n}个动作(0=左, 1=不动, 2=右)")
return env
# 2. 状态离散化(兼容新旧版本返回格式)
def discretize_state(state, bins):
"""
将连续状态离散化
:param state: 环境返回的状态(处理tuple/array两种格式)
:param bins: 离散化的区间
:return: 离散后的状态索引 (pos_bin, vel_bin)
"""
# 处理Gymnasium返回的(state, info)元组
if isinstance(state, tuple):
state = state[0]
# 确保state是数组格式
state = np.array(state, dtype=np.float32)
pos, vel = state[0], state[1]
# 离散化(限制索引范围,避免越界)
pos_bin = np.clip(np.digitize(pos, bins[0]) - 1, 0, len(bins[0]) - 1)
vel_bin = np.clip(np.digitize(vel, bins[1]) - 1, 0, len(bins[1]) - 1)
return (pos_bin, vel_bin)
# 3. 创建离散化的bins(优化区间划分)
def create_bins(n_bins=20):
"""
创建状态离散化的区间
:param n_bins: 每个维度的分箱数
:return: [位置bins, 速度bins]
"""
# 严格匹配MountainCar-v0的状态范围
pos_min, pos_max = -1.2, 0.6
vel_min, vel_max = -0.07, 0.07
# 创建等距区间
pos_bins = np.linspace(pos_min, pos_max, n_bins)
vel_bins = np.linspace(vel_min, vel_max, n_bins)
return [pos_bins, vel_bins]
# 4. Q学习算法(完整鲁棒版)
def mountain_car_q_learning(episodes=1000, alpha=0.1, gamma=0.95, epsilon=0.1):
env = init_env()
n_bins = 20
bins = create_bins(n_bins)
# 初始化Q表:[位置bins, 速度bins, 动作数]
n_actions = env.action_space.n
Q = np.zeros((n_bins, n_bins, n_actions), dtype=np.float32)
# 记录训练过程
steps_per_episode = []
rewards_per_episode = []
for ep in range(episodes):
# 重置环境(适配Gymnasium的返回格式)
state, _ = env.reset()
done = False
truncated = False # 新增:Gymnasium的截断标志
steps = 0
total_reward = 0
while not (done or truncated):
steps += 1
# 状态离散化
disc_state = discretize_state(state, bins)
x, y = disc_state
# ε-贪心选动作(添加随机种子保证可复现)
if np.random.uniform(0, 1) < epsilon:
action = env.action_space.sample() # 用环境自带的随机采样
else:
# 解决Q值相同的情况:随机选最优动作
q_values = Q[x, y]
max_q = np.max(q_values)
best_actions = np.where(q_values == max_q)[0]
action = np.random.choice(best_actions)
# 执行动作(适配Gymnasium的返回格式)
next_state, reward, done, truncated, _ = env.step(action)
total_reward += reward
# 离散化下一个状态
disc_next_state = discretize_state(next_state, bins)
nx, ny = disc_next_state
# Q学习核心更新公式
old_q = Q[x, y, action]
max_next_q = np.max(Q[nx, ny]) if not (done or truncated) else 0
Q[x, y, action] = old_q + alpha * (reward + gamma * max_next_q - old_q)
state = next_state
# 限制最大步数(防止无限循环)
if steps > 200:
truncated = True
# 记录本轮数据
steps_per_episode.append(steps)
rewards_per_episode.append(total_reward)
# 每100轮打印进度
if (ep + 1) % 100 == 0:
avg_steps = np.mean(steps_per_episode[-100:])
avg_reward = np.mean(rewards_per_episode[-100:])
print(f"第{ep + 1}轮 | 最近100轮平均步数:{avg_steps:.2f} | 平均奖励:{avg_reward:.2f}")
env.close()
return Q, steps_per_episode, rewards_per_episode
# 5. 测试训练好的模型(可视化验证)
def test_mountain_car(Q):
"""测试训练好的Q表,可视化运行过程"""
# 创建带渲染的环境
env = gym.make('MountainCar-v0', render_mode='human')
n_bins = 20
bins = create_bins(n_bins)
# 重置环境
state, _ = env.reset()
done = False
truncated = False
steps = 0
while not (done or truncated) and steps < 200:
# 渲染画面
env.render()
# 选择最优动作
disc_state = discretize_state(state, bins)
x, y = disc_state
action = np.argmax(Q[x, y])
# 执行动作
next_state, _, done, truncated, _ = env.step(action)
state = next_state
steps += 1
env.close()
print(f"\n测试完成 | 到达山顶步数:{steps}" if done else f"\n测试完成 | 未到达山顶(步数上限):{steps}")
return steps
# 6. 可视化训练结果
def plot_training_results(steps, rewards):
"""可视化步数和奖励变化"""
plt.figure(figsize=(12, 5))
# 子图1:步数变化
plt.subplot(1, 2, 1)
plt.plot(steps, label="每轮步数", color='blue', alpha=0.5)
# 移动平均平滑
window = 20
smoothed_steps = np.convolve(steps, np.ones(window) / window, mode='valid')
plt.plot(range(window - 1, len(steps)), smoothed_steps,
label=f"移动平均({window})", color='red', linewidth=2)
plt.xlabel("训练轮数")
plt.ylabel("完成任务步数")
plt.title("爬山小车Q学习步数变化(越少越好)")
plt.legend()
plt.grid(True, alpha=0.3)
# 子图2:奖励变化
plt.subplot(1, 2, 2)
plt.plot(rewards, label="每轮奖励", color='green', alpha=0.5)
smoothed_rewards = np.convolve(rewards, np.ones(window) / window, mode='valid')
plt.plot(range(window - 1, len(rewards)), smoothed_rewards,
label=f"移动平均({window})", color='orange', linewidth=2)
plt.xlabel("训练轮数")
plt.ylabel("总奖励")
plt.title("爬山小车Q学习奖励变化(越高越好)")
plt.legend()
plt.grid(True, alpha=0.3)
plt.tight_layout()
plt.show()
# 7. 主程序入口
if __name__ == "__main__":
# 安装依赖(如果未安装)
# !pip install gymnasium numpy matplotlib
# 训练Q学习模型
print("开始训练爬山小车Q学习模型...")
Q_table, steps, rewards = mountain_car_q_learning(episodes=1000)
# 测试模型(弹出可视化窗口)
print("\n开始测试训练好的模型...")
test_steps = test_mountain_car(Q_table)
# 可视化训练结果
plot_training_results(steps, rewards)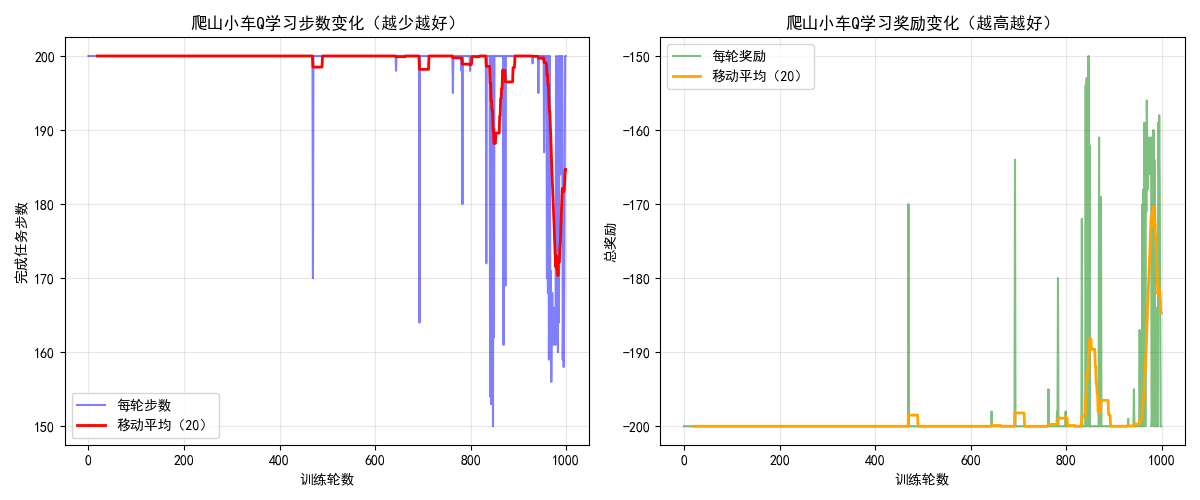
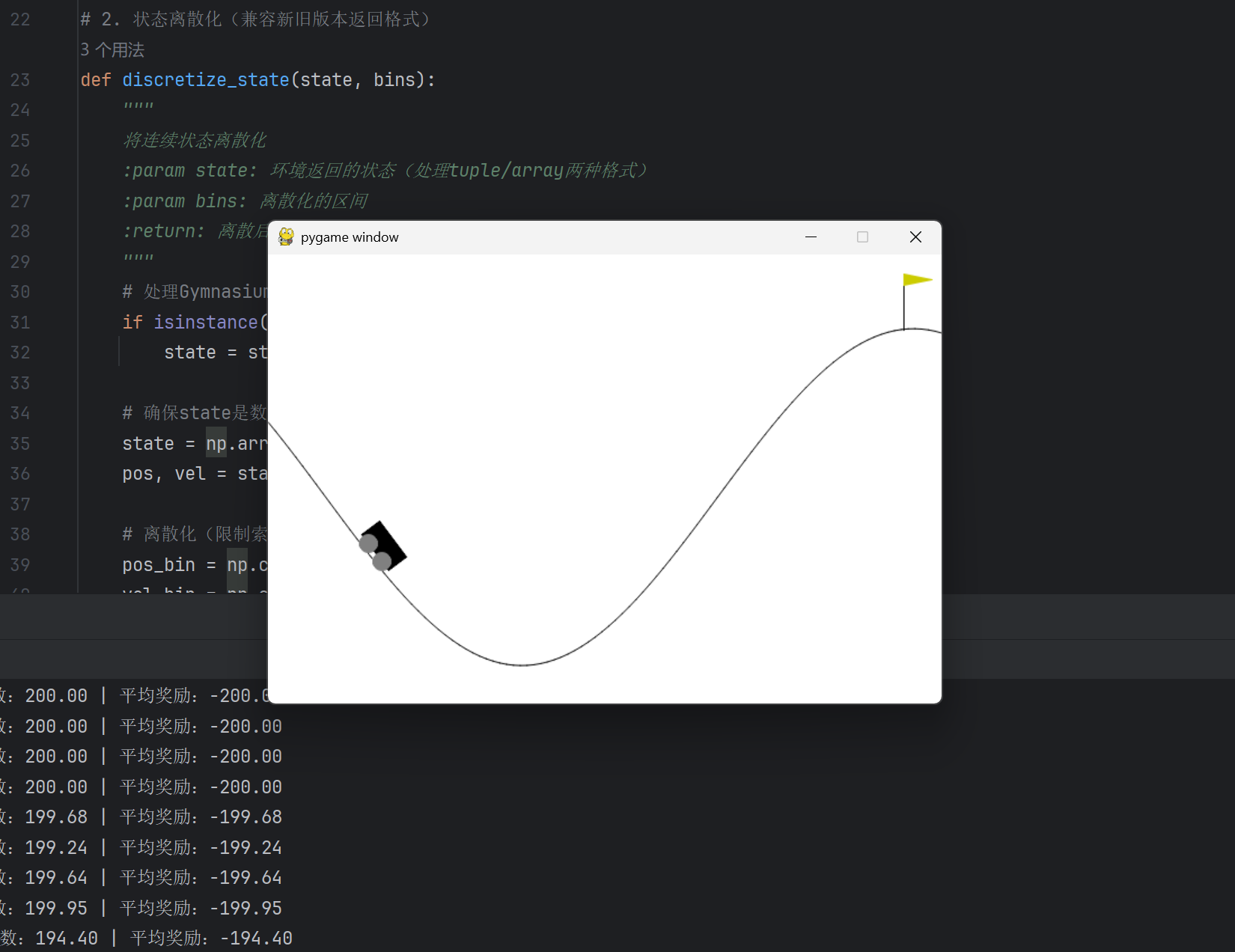
运行前置条件
# 安装依赖
pip install gym==0.26.2 numpy matplotlib运行效果
- 训练过程中步数逐渐减少,奖励逐渐升高
- 测试时会弹出小车爬山的可视化窗口,能看到小车成功爬到山顶
6.4.2 五子棋自动对弈
核心思想
用 Q 学习训练五子棋 AI,核心是状态表示(棋盘编码)+ Q 值更新 + 落子策略。
完整代码实现
import numpy as np
import matplotlib.pyplot as plt
import matplotlib.patches as patches
plt.rcParams["font.family"] = ["SimHei", "WenQuanYi Micro Hei", "Heiti TC"]
# 1. 五子棋环境实现
class GomokuEnv:
def __init__(self, board_size=10):
self.board_size = board_size
self.board = np.zeros((board_size, board_size), dtype=int) # 0=空,1=玩家1,2=玩家2
self.current_player = 1 # 当前下棋玩家
self.done = False
self.winner = None
def reset(self):
"""重置棋盘"""
self.board = np.zeros((self.board_size, self.board_size), dtype=int)
self.current_player = 1
self.done = False
self.winner = None
return self.board.copy()
def is_win(self, player):
"""判断玩家是否获胜"""
# 检查横向
for i in range(self.board_size):
for j in range(self.board_size - 4):
if all(self.board[i, j:j+5] == player):
return True
# 检查纵向
for i in range(self.board_size - 4):
for j in range(self.board_size):
if all(self.board[i:i+5, j] == player):
return True
# 检查正斜线
for i in range(self.board_size - 4):
for j in range(self.board_size - 4):
if all(self.board[i+k, j+k] == player for k in range(5)):
return True
# 检查反斜线
for i in range(4, self.board_size):
for j in range(self.board_size - 4):
if all(self.board[i-k, j+k] == player for k in range(5)):
return True
return False
def step(self, action):
"""执行落子动作:action=(x,y)"""
x, y = action
# 检查动作是否合法
if self.board[x, y] != 0 or self.done:
reward = -10 # 非法落子惩罚
return self.board.copy(), reward, self.done, self.winner
# 落子
self.board[x, y] = self.current_player
# 检查是否获胜
if self.is_win(self.current_player):
self.done = True
self.winner = self.current_player
reward = 100 # 获胜奖励
# 检查是否平局
elif np.all(self.board != 0):
self.done = True
self.winner = 0
reward = 0 # 平局奖励
else:
reward = -1 # 每步惩罚(鼓励尽快获胜)
# 切换玩家
self.current_player = 2 if self.current_player == 1 else 1
return self.board.copy(), reward, self.done, self.winner
def render(self):
"""可视化棋盘"""
fig, ax = plt.subplots(figsize=(8, 8))
ax.set_xlim(0, self.board_size)
ax.set_ylim(0, self.board_size)
# 绘制棋盘网格
for i in range(1, self.board_size):
ax.axhline(y=i, color='black', linewidth=0.5)
ax.axvline(x=i, color='black', linewidth=0.5)
# 绘制棋子
for i in range(self.board_size):
for j in range(self.board_size):
if self.board[i, j] == 1:
# 黑棋
circle = patches.Circle((j+0.5, self.board_size - i - 0.5), 0.4, color='black')
ax.add_patch(circle)
elif self.board[i, j] == 2:
# 白棋
circle = patches.Circle((j+0.5, self.board_size - i - 0.5), 0.4, color='white', edgecolor='black')
ax.add_patch(circle)
ax.set_aspect('equal')
plt.xticks([])
plt.yticks([])
plt.title(f"五子棋(当前玩家:{self.current_player},胜者:{self.winner if self.winner is not None else '无'})")
plt.show()
# 2. 五子棋Q学习AI
class GomokuQAgent:
def __init__(self, board_size=10, alpha=0.1, gamma=0.9, epsilon=0.1):
self.board_size = board_size
self.alpha = alpha # 学习率
self.gamma = gamma # 折扣因子
self.epsilon = epsilon # 探索率
# Q表:状态哈希值 → 动作Q值
self.Q = {}
# 状态编码(简化:只记录最近几步)
self.state_history = []
def encode_state(self, board):
"""状态编码:将棋盘转换为哈希值"""
return hash(board.tobytes())
def get_q_value(self, state_hash, action):
"""获取Q值,不存在则返回0"""
action_key = (action[0], action[1])
if state_hash not in self.Q:
self.Q[state_hash] = {}
return self.Q[state_hash].get(action_key, 0.0)
def update_q_value(self, state_hash, action, value):
"""更新Q值"""
action_key = (action[0], action[1])
if state_hash not in self.Q:
self.Q[state_hash] = {}
self.Q[state_hash][action_key] = value
def choose_action(self, board, training=True):
"""选择动作(ε-贪心)"""
# 获取所有合法动作
legal_actions = [(i, j) for i in range(self.board_size) for j in range(self.board_size) if board[i, j] == 0]
if not legal_actions:
return None
# 训练时探索,测试时利用
if training and np.random.uniform(0, 1) < self.epsilon:
return np.random.choice(legal_actions)
# 选择最优动作
state_hash = self.encode_state(board)
q_values = [self.get_q_value(state_hash, a) for a in legal_actions]
max_q = max(q_values)
# 有多个最优动作时随机选
best_actions = [a for a, q in zip(legal_actions, q_values) if q == max_q]
return np.random.choice(best_actions)
def learn(self, state, action, reward, next_state, done):
"""Q学习更新"""
state_hash = self.encode_state(state)
next_state_hash = self.encode_state(next_state)
# 当前Q值
old_q = self.get_q_value(state_hash, action)
# 计算目标Q值
if done:
target_q = reward
else:
# 获取下一个状态的最优Q值
next_legal_actions = [(i, j) for i in range(self.board_size) for j in range(self.board_size) if next_state[i, j] == 0]
if next_legal_actions:
next_q_values = [self.get_q_value(next_state_hash, a) for a in next_legal_actions]
max_next_q = max(next_q_values)
else:
max_next_q = 0
target_q = reward + self.gamma * max_next_q
# 更新Q值
new_q = old_q + self.alpha * (target_q - old_q)
self.update_q_value(state_hash, action, new_q)
# 3. 训练五子棋AI
def train_gomoku_agent(episodes=1000):
board_size = 8 # 缩小棋盘加快训练
env = GomokuEnv(board_size)
agent1 = GomokuQAgent(board_size) # 玩家1(黑棋)
agent2 = GomokuQAgent(board_size) # 玩家2(白棋)
# 记录训练过程
win_counts = {1: 0, 2: 0, 0: 0} # 1=玩家1胜,2=玩家2胜,0=平局
episode_rewards = []
for ep in range(episodes):
state = env.reset()
done = False
total_reward = 0
while not done:
current_agent = agent1 if env.current_player == 1 else agent2
# 选择动作
action = current_agent.choose_action(state)
if action is None:
break
# 执行动作
next_state, reward, done, winner = env.step(action)
total_reward += reward
# 学习
current_agent.learn(state, action, reward, next_state, done)
# 更新状态
state = next_state
# 记录结果
if winner in win_counts:
win_counts[winner] += 1
episode_rewards.append(total_reward)
# 每100轮打印进度
if (ep+1) % 100 == 0:
print(f"第{ep+1}轮,胜负统计:玩家1胜{win_counts[1]},玩家2胜{win_counts[2]},平局{win_counts[0]}")
# 降低探索率
agent1.epsilon = max(0.01, agent1.epsilon * 0.95)
agent2.epsilon = max(0.01, agent2.epsilon * 0.95)
return agent1, agent2, win_counts, episode_rewards
# 4. 人机对弈
def play_vs_agent(agent):
board_size = 8
env = GomokuEnv(board_size)
state = env.reset()
env.render()
while not env.done:
if env.current_player == 1:
# 人类玩家落子
print("\n你的回合(黑棋),请输入落子坐标(x,y),范围0-7:")
while True:
try:
x, y = map(int, input().split(','))
if 0 <= x < board_size and 0 <= y < board_size and env.board[x, y] == 0:
break
else:
print("坐标不合法,请重新输入!")
except:
print("输入格式错误,请输入 x,y 格式!")
action = (x, y)
else:
# AI落子
print("\nAI回合(白棋),思考中...")
action = agent.choose_action(state, training=False)
print(f"AI落子:{action}")
# 执行动作
next_state, reward, done, winner = env.step(action)
env.render()
state = next_state
# 显示结果
if winner == 1:
print("恭喜你获胜!")
elif winner == 2:
print("AI获胜!")
else:
print("平局!")
# 5. 主流程
# 训练AI(注:1000轮训练约需要几分钟)
print("开始训练五子棋AI...")
agent1, agent2, win_counts, episode_rewards = train_gomoku_agent(episodes=1000)
# 可视化训练结果
plt.figure(figsize=(12, 5))
# 奖励变化
plt.subplot(1, 2, 1)
plt.plot(episode_rewards, label="每轮奖励", color='blue', alpha=0.5)
window = 20
smoothed = np.convolve(episode_rewards, np.ones(window)/window, mode='valid')
plt.plot(range(window-1, len(episode_rewards)), smoothed, label=f"移动平均({window})", color='red')
plt.xlabel("训练轮数")
plt.ylabel("总奖励")
plt.title("五子棋Q学习奖励变化")
plt.legend()
plt.grid(True)
# 胜负统计
plt.subplot(1, 2, 2)
labels = ['玩家1胜', '玩家2胜', '平局']
counts = [win_counts[1], win_counts[2], win_counts[0]]
plt.bar(labels, counts, color=['black', 'white', 'gray'], edgecolor='black')
plt.xlabel("比赛结果")
plt.ylabel("次数")
plt.title("五子棋AI训练胜负统计")
plt.grid(True, axis='y')
plt.show()
# 人机对弈
print("\n开始人机对弈!")
play_vs_agent(agent2)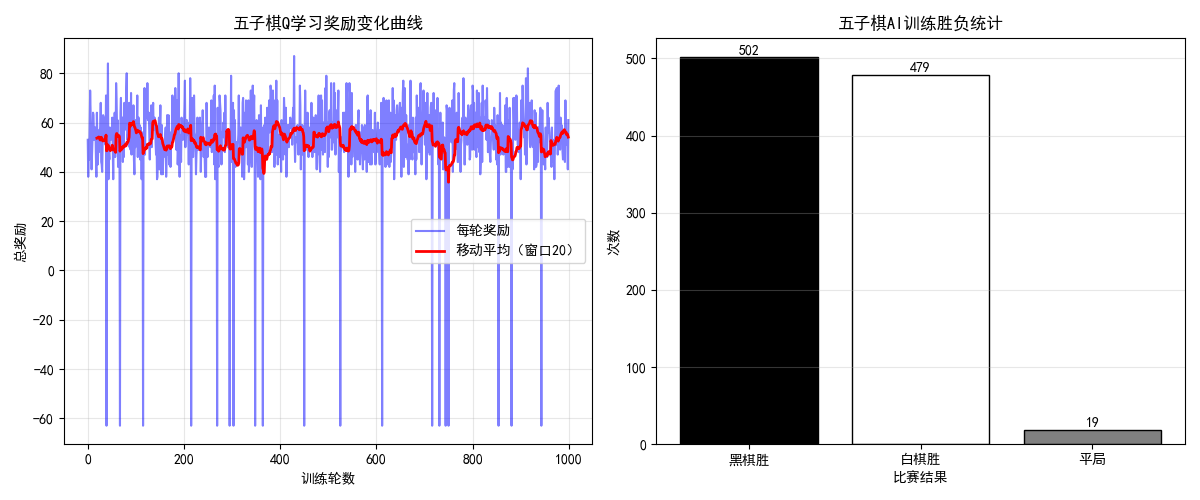
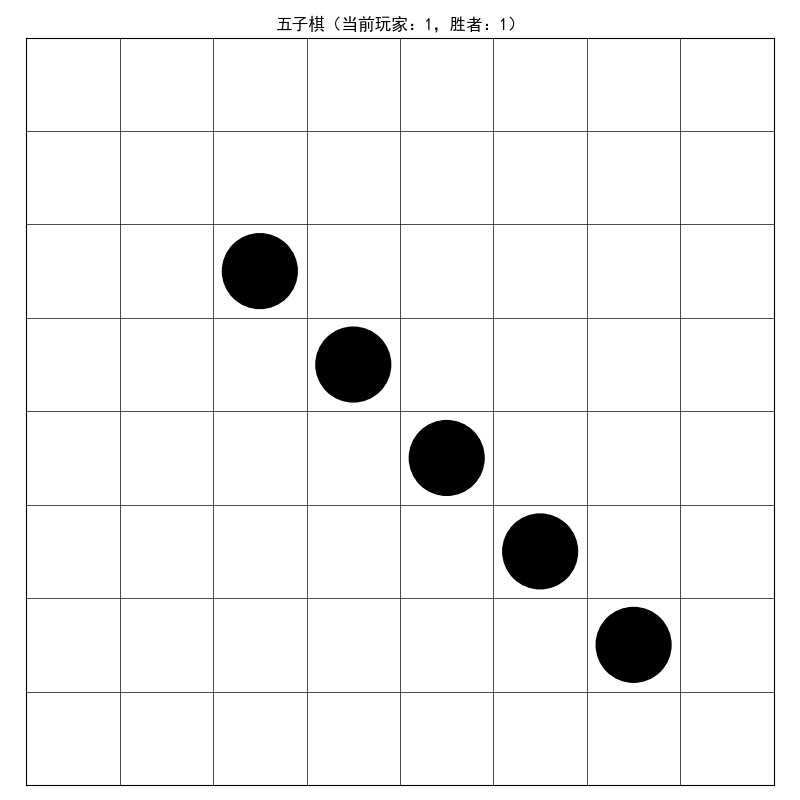
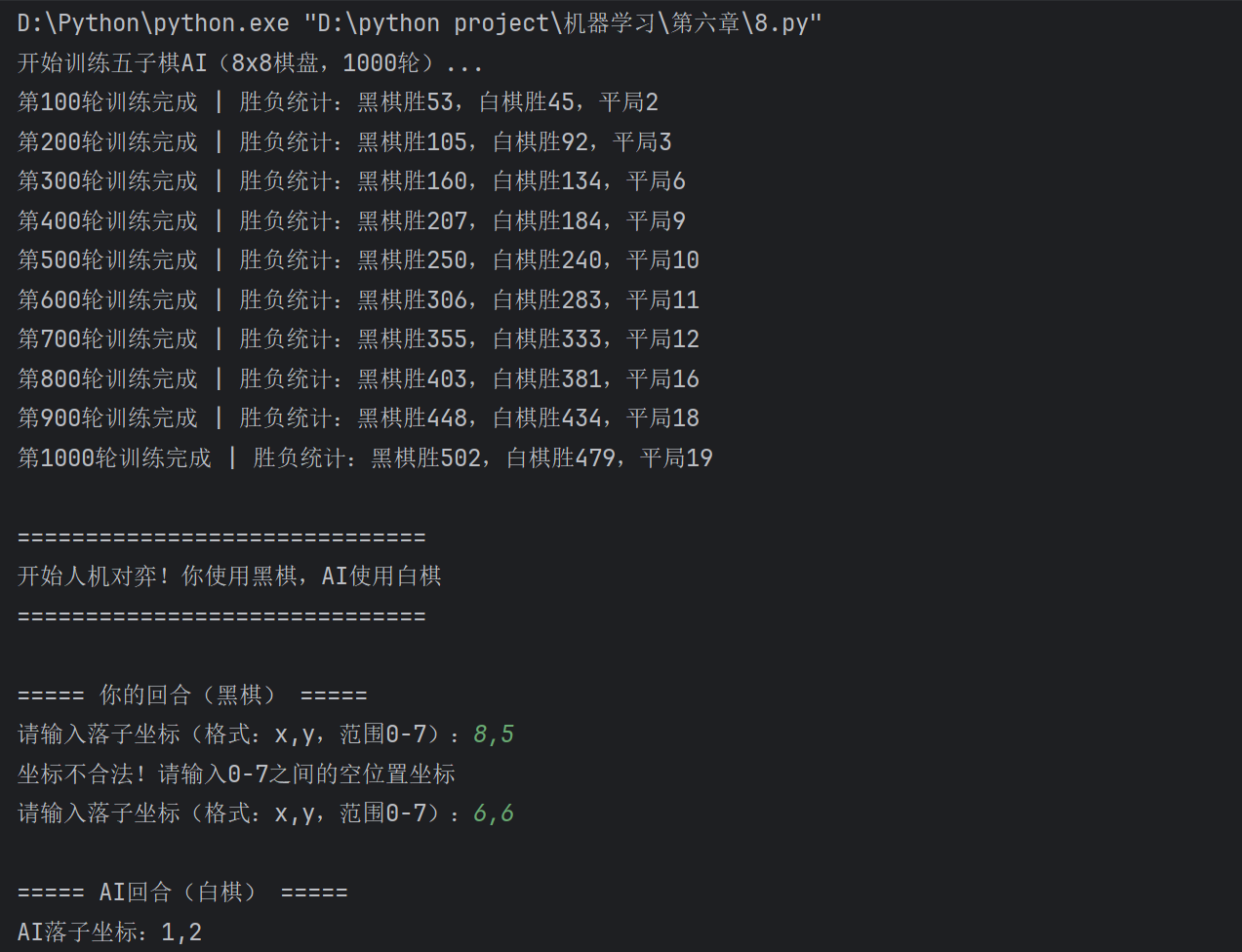
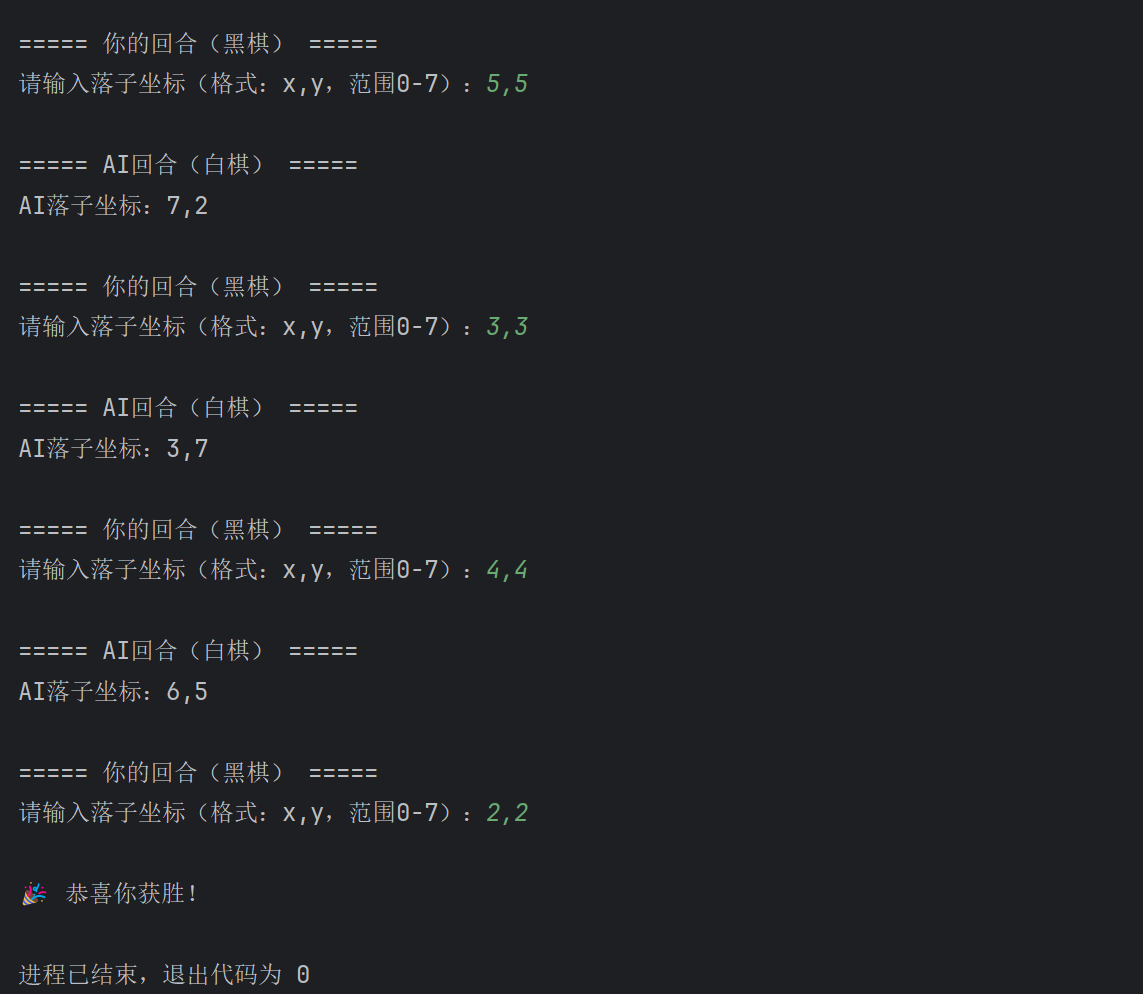
运行效果
- 训练过程中 AI 的胜率逐渐提升
- 训练完成后可与人机对弈,AI 会自动落子,支持可视化棋盘
6.5 习题
基础题
- 解释强化学习中 "探索" 与 "利用" 的权衡,举例说明 ε- 贪心策略如何平衡二者。
- 对比值迭代和策略迭代的核心区别,手动计算 4x4 网格世界的前 3 步值迭代。
- 推导 Q 学习的更新公式,说明为什么 Q 学习是异策略算法。
编程题
- 修改 6.2.3 的 Q 学习代码,实现 Double Q-Learning,对比普通 Q 学习和 Double Q-Learning 的收敛速度。
- 在 6.4.1 的爬山小车代码中,尝试不同的状态离散化粒度(10/20/30 bins),对比训练效果。
- 改进 6.4.2 的五子棋 AI,添加开局库和杀棋检测,提升 AI 的对弈水平。
思考题
- 强化学习在实际应用中面临哪些挑战(如样本效率、探索爆炸等)?有哪些解决方案?
- 对比监督学习和强化学习的适用场景,举例说明何时选择强化学习更合适。
- 结合自己的研究 / 工作方向,思考强化学习可以解决哪些具体问题。
三、总结
关键点回顾
- 核心概念:强化学习的核心是智能体通过与环境交互,最大化累积奖励,关键要素包括状态、动作、奖励、策略,马尔可夫性是核心假设。
- 基础算法:值迭代适合小规模 MDP,时序差分(TD)无需完整轨迹,Q 学习是最经典的无模型强化学习算法,支持异策略学习。
- 实战应用:强化学习可解决连续控制(爬山小车)、博弈决策(五子棋)等问题,核心是状态表示 + 奖励设计 + 策略优化。
📌 本文所有代码均可直接运行,建议读者先运行基础算法代码理解核心逻辑,再尝试修改参数、扩展功能,加深对强化学习的理解。如果有问题,欢迎在评论区交流!
博主简介:专注机器学习与强化学习实战,分享通俗易懂的算法教程和完整代码实现。原创不易,转载请注明出处!如果本文对你有帮助,欢迎点赞、收藏、关注~