官方教程:https://docs.isaacsim.omniverse.nvidia.com/5.1.0/installation/install_workstation.html
博主基于Docker容器安装,亦可选择快速安装https://docs.isaacsim.omniverse.nvidia.com/5.1.0/installation/quick-install.html。
1 检查主机配置
1.1 安装Docker
sudo apt update sudo apt install curl -y curl -fsSL https://get.docker.com -o get-docker.sh sudo sh get-docker.sh
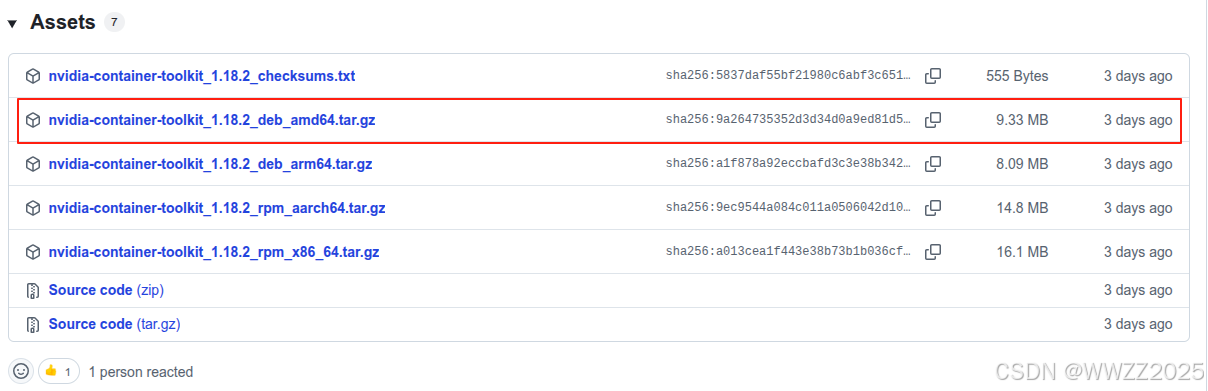
1.2 安装NVIDIA Container Toolkit
下载链接:https://github.com/NVIDIA/nvidia-container-toolkit/releases/tag/v1.18.2
安装Toolkit:
cd release-v1.18.2-stable/packages/ubuntu18.04/amd64/ sudo dpkg -i libnvidia-container1_1.18.2-1_amd64.deb \ libnvidia-container-tools_1.18.2-1_amd64.deb \ nvidia-container-toolkit-base_1.18.2-1_amd64.deb \ nvidia-container-toolkit_1.18.2-1_amd64.deb关联Docker并重启:
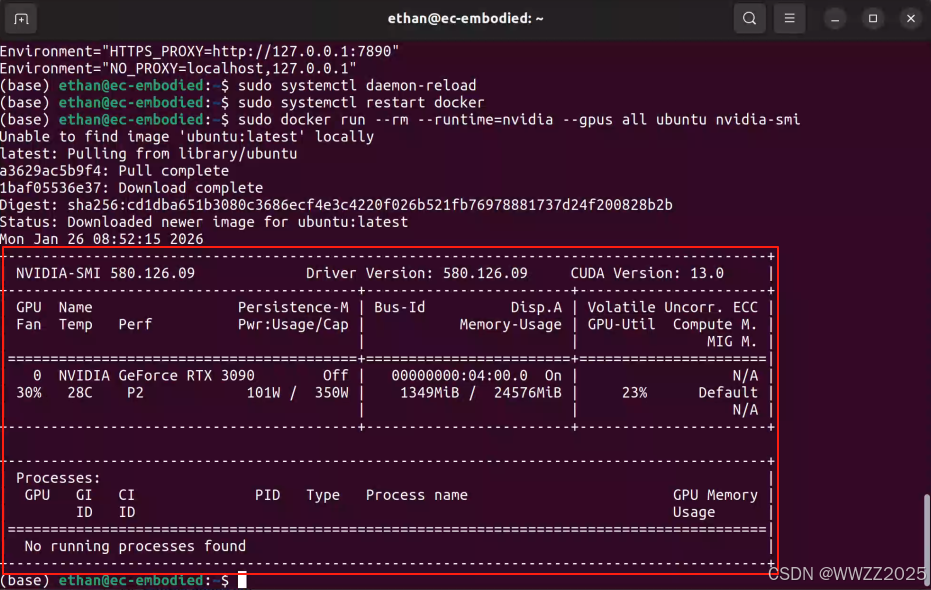
sudo nvidia-ctk runtime configure --runtime=docker sudo systemctl restart docker显示GPU信息:
sudo docker run --rm --runtime=nvidia --gpus all ubuntu nvidia-smi
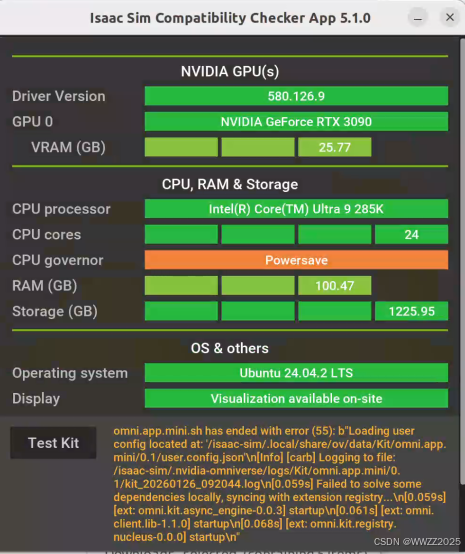
1.3 主机配置检查
xhost +local: sudo docker run --entrypoint bash -it --gpus all --rm --network=host \ -e "PRIVACY_CONSENT=Y" \ -v $HOME/.Xauthority:/root/.Xauthority \ -e DISPLAY=$DISPLAY \ nvcr.io/nvidia/isaac-sim:5.1.0 ./isaac-sim.compatibility_check.sh点击Test Kit,只要没有红色框即可,绿色代表极佳、浅绿代表好、橙色代表可以。
2 安装Isaac Sim
2.1 检查Isaac Sim包
sudo docker images

2.2 规划数据存储位置
博主放在了第二块固态硬盘中,此处亦可放在默认位置
# 1. 在大硬盘创建主文件夹 mkdir -p /media/ethan/Data01/isaac-sim-data # 2. 在里面创建文档要求的所有子目录 mkdir -p /media/ethan/Data01/isaac-sim-data/cache/main/ov mkdir -p /media/ethan/Data01/isaac-sim-data/cache/main/warp mkdir -p /media/ethan/Data01/isaac-sim-data/cache/computecache mkdir -p /media/ethan/Data01/isaac-sim-data/config mkdir -p /media/ethan/Data01/isaac-sim-data/data/documents mkdir -p /media/ethan/Data01/isaac-sim-data/data/Kit mkdir -p /media/ethan/Data01/isaac-sim-data/logs mkdir -p /media/ethan/Data01/isaac-sim-data/pkg # 3. 核心步骤:赋予容器权限 (1234 是 Isaac Sim 容器内的用户 ID) sudo chown -R 1234:1234 /media/ethan/Data01/isaac-sim-data默认位置:
mkdir -p ~/docker/isaac-sim/cache/main/ov mkdir -p ~/docker/isaac-sim/cache/main/warp mkdir -p ~/docker/isaac-sim/cache/computecache mkdir -p ~/docker/isaac-sim/config mkdir -p ~/docker/isaac-sim/data/documents mkdir -p ~/docker/isaac-sim/data/Kit mkdir -p ~/docker/isaac-sim/logs mkdir -p ~/docker/isaac-sim/pkg sudo chown -R 1234:1234 ~/docker/isaac-sim
2.3 映射路径
xhost +local: docker run --name isaac-sim --entrypoint bash -it --gpus all -e "ACCEPT_EULA=Y" --rm --network=host \ -e "PRIVACY_CONSENT=Y" \ -v $HOME/.Xauthority:/isaac-sim/.Xauthority \ -e DISPLAY \ -v ~/docker/isaac-sim/cache/main:/isaac-sim/.cache:rw \ -v ~/docker/isaac-sim/cache/computecache:/isaac-sim/.nv/ComputeCache:rw \ -v ~/docker/isaac-sim/logs:/isaac-sim/.nvidia-omniverse/logs:rw \ -v ~/docker/isaac-sim/config:/isaac-sim/.nvidia-omniverse/config:rw \ -v ~/docker/isaac-sim/data:/isaac-sim/.local/share/ov/data:rw \ -v ~/docker/isaac-sim/pkg:/isaac-sim/.local/share/ov/pkg:rw \ -u 1234:1234 \ nvcr.io/nvidia/isaac-sim:5.1.0默认使用:
xhost +local: docker run --name isaac-sim --entrypoint bash -it --gpus all -e "ACCEPT_EULA=Y" --rm --network=host \ -e "PRIVACY_CONSENT=Y" \ -v $HOME/.Xauthority:/isaac-sim/.Xauthority \ -e DISPLAY \ -v ~/docker/isaac-sim/cache/main:/isaac-sim/.cache:rw \ -v ~/docker/isaac-sim/cache/computecache:/isaac-sim/.nv/ComputeCache:rw \ -v ~/docker/isaac-sim/logs:/isaac-sim/.nvidia-omniverse/logs:rw \ -v ~/docker/isaac-sim/config:/isaac-sim/.nvidia-omniverse/config:rw \ -v ~/docker/isaac-sim/data:/isaac-sim/.local/share/ov/data:rw \ -v ~/docker/isaac-sim/pkg:/isaac-sim/.local/share/ov/pkg:rw \ -u 1234:1234 \ nvcr.io/nvidia/isaac-sim:5.1.0
3 运行启动
./runapp.sh

4 配置环境变量
长期启动指令为:映射路径+运行启动指令,为简化启动命令修改环境变量。
gedit ~/.bashrc拉到文本末尾复制下列内容、保存,如使用默认路径需修改一致
alias isaac='xhost +local: && sudo docker run --name isaac-sim -it --entrypoint bash --runtime=nvidia --gpus all -e "ACCEPT_EULA=Y" -e "PRIVACY_CONSENT=Y" --rm --network=host \ -v $HOME/.Xauthority:/root/.Xauthority \ -e DISPLAY=$DISPLAY \ -v /media/ethan/Data01/isaac-sim-data/cache/main/ov:/root/.cache/ov:rw \ -v /media/ethan/Data01/isaac-sim-data/cache/main/warp:/root/.cache/warp:rw \ -v /media/ethan/Data01/isaac-sim-data/cache/computecache:/root/.cache/nvidia/computeCache:rw \ -v /media/ethan/Data01/isaac-sim-data/config:/root/.nv/nvidia-omniverse/config:rw \ -v /media/ethan/Data01/isaac-sim-data/data/documents:/root/Documents:rw \ -v /media/ethan/Data01/isaac-sim-data/data/Kit:/root/.local/share/ov/data/Kit:rw \ -v /media/ethan/Data01/isaac-sim-data/logs:/root/.nvidia-omniverse/logs:rw \ -v /media/ethan/Data01/isaac-sim-data/pkg:/root/.local/share/ov/pkg:rw \ nvcr.io/nvidia/isaac-sim:5.1.0 ./runapp.sh --headless'更新环境变量:
source ~/.bashrc终端启动命令:
isaac