一、实验数据
真实直线+噪声+离群点
真实模型(Ground Truth)

cpp
clc; clear; close all;
rng(2);
% ===== Ground Truth =====
theta_gt = pi/6; % 30°
rho_gt = 40;
x = linspace(0,100,50);
y = (rho_gt - x*cos(theta_gt))/sin(theta_gt);
% 亚像素高斯噪声
y = y + 0.1*randn(size(y));
% 离群点
x_out = rand(1,15)*100;
y_out = rand(1,15)*100;
X = [x x_out];
Y = [y y_out];
pts = [X(:), Y(:)];
% 画出原始数据
scatter(X, Y, 25, 'k', 'filled')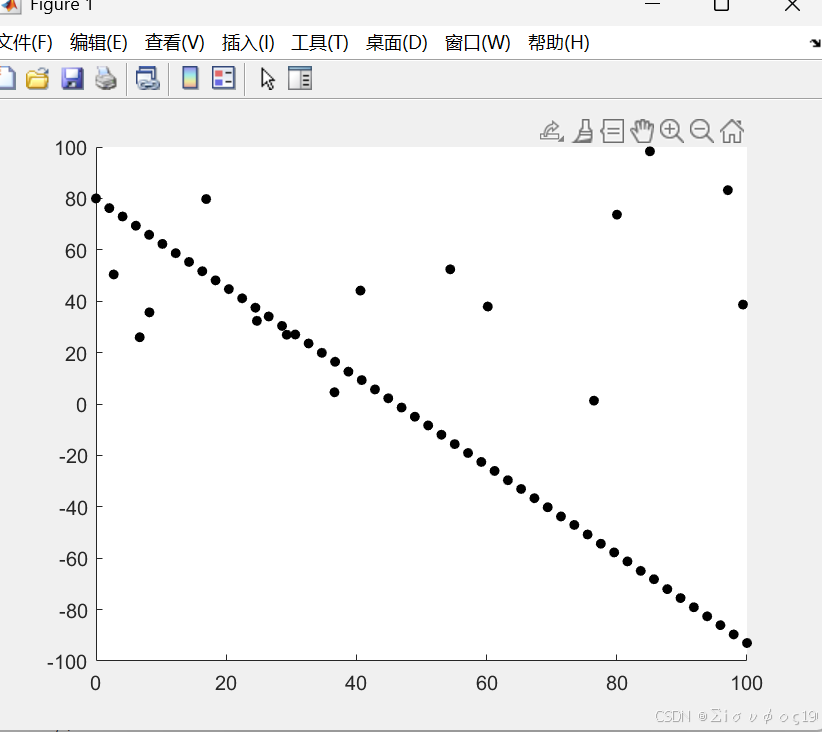
二、方法一:最小二乘(LS / 正交最小二乘)
cpp
% 计算均值
mu = mean(pts);
% 计算当前点 -均值
Xc = pts - mu;
[~,~,V] = svd(Xc,0);
n_ls = V(:,2); % 法向
theta_ls = atan2(n_ls(2), n_ls(1));
rho_ls = mu * n_ls;
三、方法二:RANSAC 拟合直线
cpp
eps = 1.0;
best_inliers = [];
theta_r = 0; rho_r = 0;
for k = 1:1000
id = randperm(size(pts,1),2);
p1 = pts(id(1),:);
p2 = pts(id(2),:);
v = p2 - p1;
n = [v(2), -v(1)];
n = n / norm(n);
rho = p1*n';
d = abs(pts*n' - rho);
inliers = find(d < eps);
if numel(inliers) > numel(best_inliers)
best_inliers = inliers;
theta_r = atan2(n(2), n(1));
rho_r = rho;
end
end四、方法三:霍夫变换
cpp
img = zeros(120,120);
ix = round(X); iy = round(Y);
valid = ix>0 & ix<=120 & iy>0 & iy<=120;
img(sub2ind(size(img), iy(valid), ix(valid))) = 1;
[H,theta,rho] = hough(img);
P = houghpeaks(H,1);
theta_h = deg2rad(theta(P(2)));
rho_h = rho(P(1));五、画图对比(重点)
cpp
xx = linspace(0,100,200);
% 真实线
yy_gt = (rho_gt - xx*cos(theta_gt))/sin(theta_gt);
yy_ls = (rho_ls - xx*cos(theta_ls))/sin(theta_ls);
yy_r = (rho_r - xx*cos(theta_r ))/sin(theta_r );
yy_h = (rho_h - xx*cos(theta_h ))/sin(theta_h );
figure; hold on; grid on; axis equal;
scatter(X, Y, 25, 'k', 'filled');
plot(xx, yy_gt, 'g-', 'LineWidth',2);
plot(xx, yy_ls, 'b--', 'LineWidth',2);
plot(xx, yy_r, 'r-.', 'LineWidth',2);
plot(xx, yy_h, 'm:', 'LineWidth',2);
legend('Data','GT','LS','RANSAC','Hough');
xlabel('x'); ylabel('y');
title('Line Fitting: Hough vs LS vs RANSAC');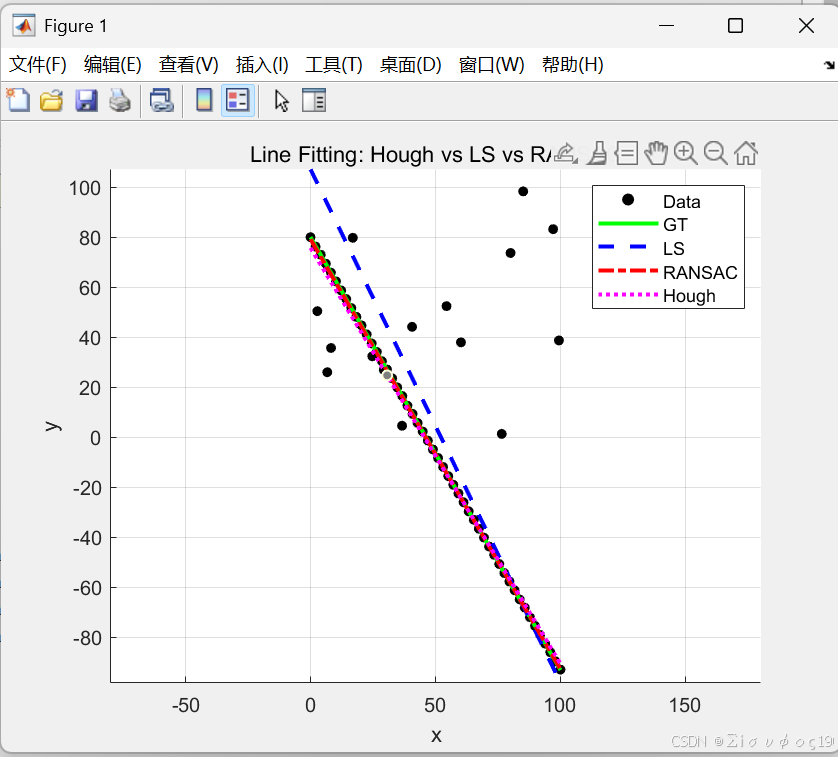
-
LS:被离群点明显拉歪
-
RANSAC:方向对,但不够精
-
霍夫:结构对,但位置"卡 bin"
-
GT:作为参考
六、统一误差计算(定量)
平均正交几何误差
参数误差

bash
%平均正交几何误差
err = @(th,rh) mean(abs(pts*[cos(th); sin(th)] - rh));
E_ls = err(theta_ls, rho_ls);
E_r = err(theta_r, rho_r );
E_h = err(theta_h, rho_h );
% 参数误差
dtheta_ls = abs(theta_ls - theta_gt);
drho_ls = abs(rho_ls - rho_gt);
dtheta_r = abs(theta_r - theta_gt);
drho_r = abs(rho_r - rho_gt);
dtheta_h = abs(theta_h - theta_gt);
drho_h = abs(rho_h - rho_gt);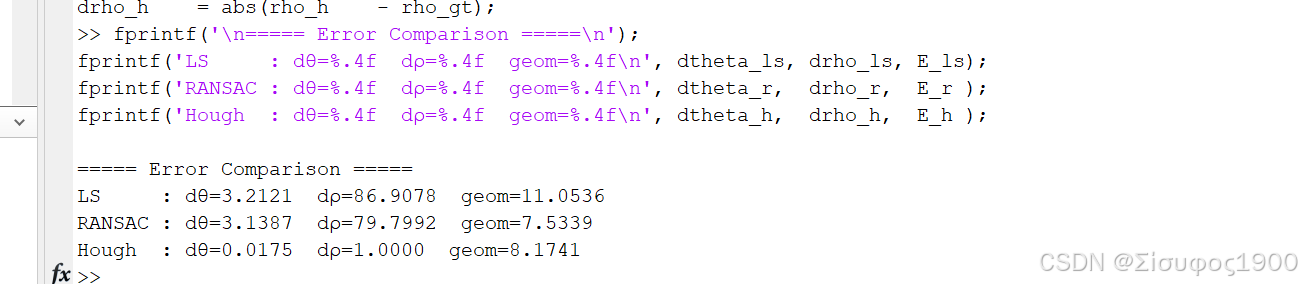
稳定结论顺序:
几何误差:RANSAC < Hough < LS (有离群点时)
参数精度:LS > RANSAC > Hough