目录
1.摘要
本文提出了一种面向地面车辆(GV)与无人机协同系统的双层路径规划方法,用于高效完成多区域覆盖任务。地面车辆作为无人机的移动平台,负责在各目标区域之间行驶并为无人机充电;无人机则在目标区域周边起飞,对区域进行扫描覆盖。研究以同时优化无人机的区域扫描路径与地面车辆的访问路径为目标,构建了一个 0--1 整数规划模型。在求解方法上,先通过基于成本节约的两阶段启发式算法快速生成可行解,再利用 自适应大邻域搜索算法(ALNS)提升解的质量。
2.问题描述和建模
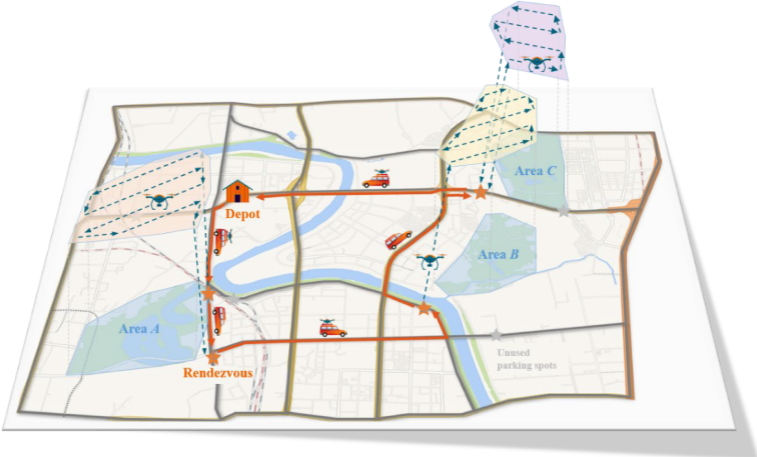
双层路径规划在无人机续航受限、车辆可移动充电的条件下,实现多区域一次性覆盖。通过建立 0--1 整数规划模型,联合优化地面车辆的行驶路径与无人机的起降、飞行及扫描路径,并利用 Floyd 算法计算车辆最短路程,在满足续航与协同约束的前提下,最小化完成全部区域覆盖的总时间。
min Z = ∑ i ∈ N 0 ∪ N s 1 j ∈ N 0 ∪ N s 2 s 1 ≠ s 2 L F i j x i j v G + ∑ s ∈ S max ( ∑ i , j ∈ N s L F i j x i j v G , ∑ i ∈ N s , j ∈ P s ( L D i j y i j s 1 + L D j i y j i s 2 ) + ∑ k ∈ U s l s k z s k v D ) \min \; Z \;=\; \sum_{\substack{i\in N_0\cup N_{s_1}\\ j\in N_0\cup N_{s_2}\\ s_1\neq s_2}} \frac{LF_{ij}\,x_{ij}}{v^{G}} \;+\; \sum_{s\in S} \max\!\left( \frac{\sum_{i,j\in N_s} LF_{ij}\,x_{ij}}{v^{G}}, \frac{ \sum_{i\in N_s,\;j\in P_s}\!\left(LD_{ij}\,y^{1}{ijs}+LD{ji}\,y^{2}{jis}\right) +\sum{k\in U_s} l^{k}{s}\,z^{k}{s} }{v^{D}} \right) minZ=i∈N0∪Ns1j∈N0∪Ns2s1=s2∑vGLFijxij+s∈S∑max(vG∑i,j∈NsLFijxij,vD∑i∈Ns,j∈Ps(LDijyijs1+LDjiyjis2)+∑k∈Uslskzsk)
3.基于储蓄策略的两阶段启发式算法
由于GV--无人机协同多区域覆盖问题中约束复杂、路径强耦合,直接同步求解计算代价高,本文提出了一种基于节约策略的两阶段启发式算法(TSH),以快速获得高质量初始解。
阶段一:无人机区域扫描路径规划
在忽略 GV 协同约束的情况下,先独立优化无人机在单一区域内的扫描路径。根据区域圆度指标选择扫描模式:圆度 ≥ 0.86:采用螺旋扫描模式;圆度 < 0.86:采用割草扫描模式。
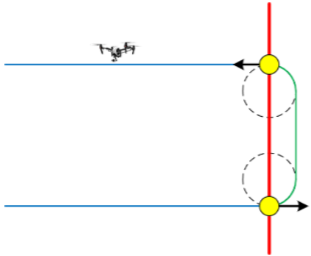
若区域为凹多边形,则先基于改进的 BCD 分解方法,沿区域长轴方向将其分解为若干凸多边形,再生成割草路径,以减少转弯次数和飞行时间。无人机转弯时间通过 Dubins 曲线建模。该阶段得到每个区域的最优扫描路径、长度及起止点。
阶段二:地面车辆路径规划
在已确定无人机扫描路径起止点的基础上,选择满足协同约束的起降停车节点,并将每个区域视为 GV 的可选访问点。基于 Floyd 最短路径算法与改进的节约算法,构建 GV 在各区域间的行驶路径,快速生成覆盖全部区域的可行初始解。
4.自适应大邻域搜索算法
针对两阶段启发式仅具局部最优的问题,本文引入改进的自适应大邻域搜索(ALNS)进行全局优化。算法以初始可行解为起点,通过自适应选择破坏---修复算子,联合调整无人机扫描路径与起降节点、以及地面车辆的访问顺序,并利用算子权重动态更新机制提升搜索效率,从而在保持可行性的同时最小化 GV--无人机协同完成多区域覆盖的总时间。
5.结果展示

6.参考文献
1 Xia Y, Chen C, Liu Y, et al. Two-layer path planning for multi-area coverage by a cooperative ground vehicle and drone systemJ. Expert Systems with Applications, 2023, 217: 119604.
7.代码获取
xx
8.算法辅导·应用定制·读者交流
xx