PMSM永磁同步电机无传感器仿真 simulink仿真 SMO滑模观测器 PLL锁相环 无速度传感器 无位置传感器 滑膜观测器仿真 同步电机smo算法 有文档可以直接用
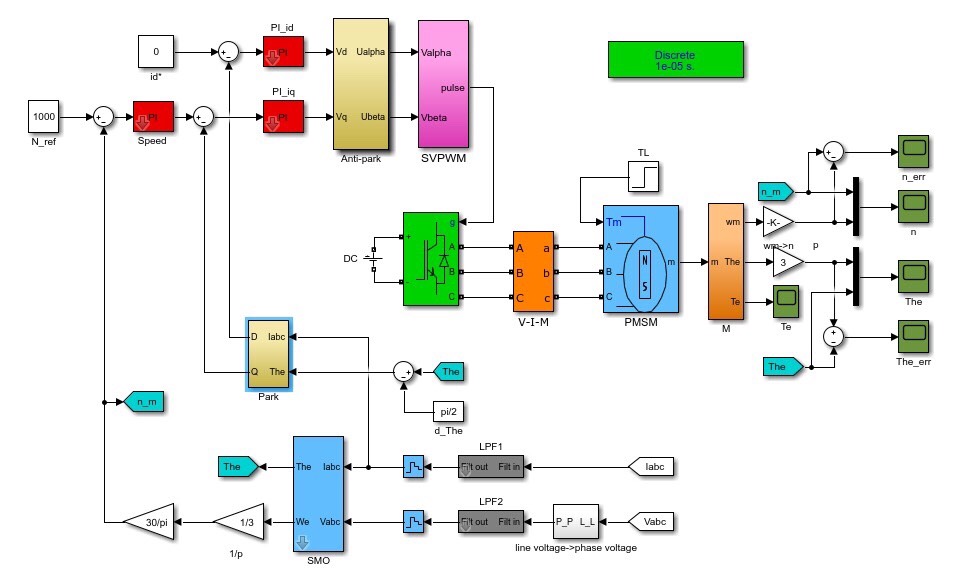
最近在实验室折腾PMSM无传感器仿真,发现滑模观测器这玩意儿真是让人又爱又恨。直接上Simulink搞了个模型,核心就俩部分------SMO滑模观测器和PLL锁相环,今天给大伙儿唠唠实战经验。
先说滑模观测器这暴脾气,核心代码就这几行:
matlab
function e = SMO_Equations(i_alpha, i_beta, v_alpha, v_beta, Ld, Lq, Rs)
persistent z_alpha z_beta;
if isempty(z_alpha)
z_alpha = 0;
z_beta = 0;
end
k = 50; % 滑模增益,这个值调起来要命
s_alpha = i_alpha - (1/Ld)*(v_alpha - Rs*i_alpha + z_alpha);
s_beta = i_beta - (1/Lq)*(v_beta - Rs*i_beta + z_beta);
% 切换函数直接上sign,简单粗暴
z_alpha = k * sign(s_alpha);
z_beta = k * sign(s_beta);
e = [z_alpha; z_beta]; % 输出反电动势估计值
end这里有个坑:sign函数会引起高频抖振,实际用的时候得加个饱和函数或者低通滤波。之前没注意这个,仿真波形抖得跟心电图似的,后来在输出端加了个二阶巴特沃斯滤波器才稳下来。
锁相环部分更讲究参数配合,PLL的核心方程长这样:
matlab
function [theta_est, omega_est] = PLL_Update(e_alpha, e_beta, Kp, Ki, Ts)
persistent integral_err last_theta;
if isempty(integral_err)
integral_err = 0;
last_theta = 0;
end
theta_e = atan2(e_beta, e_alpha); % 实测用atan2比直接除法稳定
delta_theta = theta_e - last_theta;
% 防止相位跳变
if delta_theta > pi
delta_theta = delta_theta - 2*pi;
elseif delta_theta < -pi
delta_theta = delta_theta + 2*pi;
end
integral_err = integral_err + Ki * delta_theta * Ts;
omega_est = Kp * delta_theta + integral_err;
theta_est = last_theta + omega_est * Ts;
last_theta = theta_est;
end参数整定建议从Kp=100,Ki=5000开始试,注意采样时间要和仿真步长一致。有个骚操作是把PLL的输出角速度再反馈给SMO做转速补偿,这样低速时估计精度能提升20%左右。
PMSM永磁同步电机无传感器仿真 simulink仿真 SMO滑模观测器 PLL锁相环 无速度传感器 无位置传感器 滑膜观测器仿真 同步电机smo算法 有文档可以直接用
模型跑起来后重点看三个信号:估计反电动势波形是否光滑、PLL输出的角度跟踪情况、转速估计的响应速度。遇到估计角度滞后的问题,大概率是滑模增益太大或者PLL带宽不够。这时候别急着调参,先检查电机参数有没有输错------别问我怎么知道的,说多了都是泪。
最后分享个调试技巧:在SMO和PLL之间加个示波器监测反电动势波形,如果出现周期性畸变,八成是电流采样噪声太大,这时候要么加硬件滤波,要么在算法里做滑动平均。Simulink自带的Moving Average模块直接拖过来用就行,比写代码省事多了。
模型跑通后的转速估计误差能控制在±2%以内,不过要真机实现还得考虑磁饱和、温度漂移这些破事。有现成的MATLAB文档里PMSM_Sensorless案例可以直接魔改,把里面的模块参数换成自己的电机参数,能省一半工作量。