目录
1.摘要
随着低空经济的发展,无人机在巡检、监视和搜救等领域得到广泛应用,多无人机协同执行监视任务的路径规划虽已有多种方法,但在复杂城市环境中常忽略通信受限、建筑遮挡和设备稳定性等不确定因素,导致任务失败。为提升局部通信网络下多无人机协同监视能力,本文将路径规划建模为包含多目标与多约束的NP-hard混合线性规划问题,并提出一种三阶段优化策略(TRUST),包括任务分组自适应、任务顺序优化和编队路径规划,该方法综合考虑区域覆盖率、能耗与任务风险,实现最优飞行路径规划。
2.问题描述
系统架构
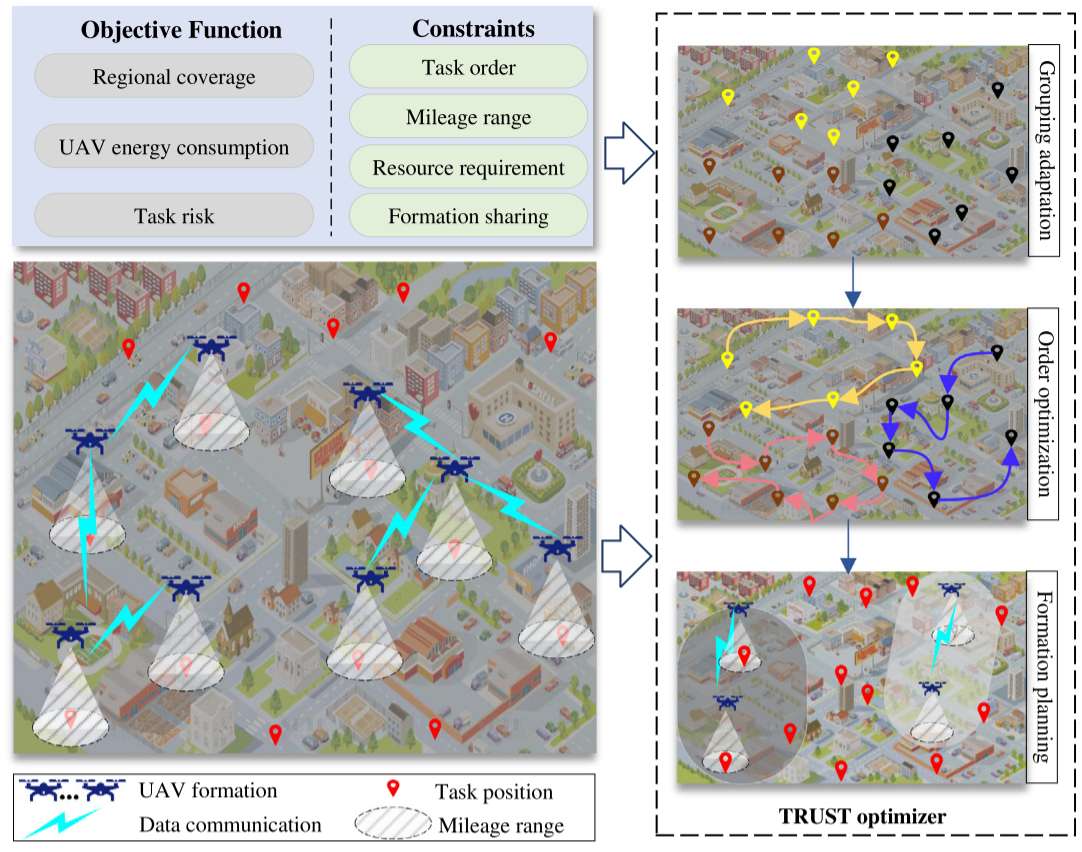
针对城市监视多无人机协同路径规划问题,本文构建了综合考虑区域覆盖率、能耗与任务风险的优化模型,并结合任务属性、无人机能力及通信条件等约束因素,提出三阶段优化框架TRUST。任务分组自适应:基于改进mean-DP算法实现任务均衡分组,提高任务分配合理性与成功率;任务顺序优化:提出改进SSSA算法优化任务执行顺序,提升无人机执行效率;编队路径规划:在局部通信条件下设计地图共享机制,并基于Dijkstra构建协同优化模型,实现高覆盖率与低能耗的编队飞行路径规划。
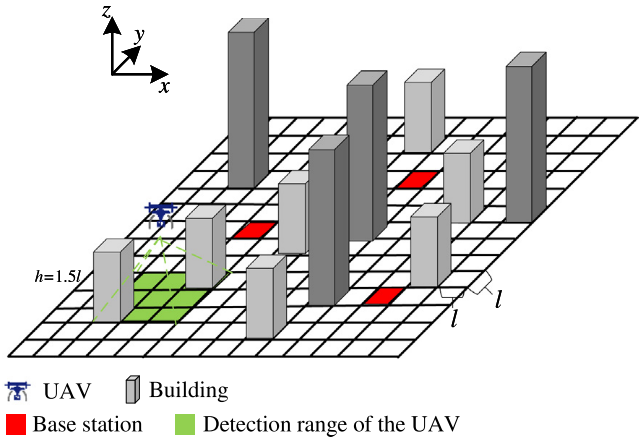
为便于建模,论文将城市划分为规则网格、建筑物简化为规则长方体、每个任务由单架无人机在单一网格内完成、任务分配结果为一系列任务点序列、无人机执行过程中仅包含飞行与悬停两种模式,以及无人机在基地站定时补能等。
将城市区域网格化为三维空间
Ω = N x × N y × N z \Omega=N_x\times N_y\times N_z Ω=Nx×Ny×Nz
城市区域监视问题通信关系由邻接矩阵表示:
A = ( a i j ) N × N A=(a_{ij})_{N\times N} A=(aij)N×N
考虑区域覆盖率、能耗与任务风险:
max F = max ( α 1 R C − α 2 E C − α 3 T R ) \max F=\max(\alpha_1RC-\alpha_2EC-\alpha_3TR) maxF=max(α1RC−α2EC−α3TR)
其中,区域覆盖率:
R C = N G N x × N y RC=\frac{N_G}{N_x\times N_y} RC=Nx×NyNG
能耗:
E C = ∑ η i , j , k ( μ i s i , j , k + ν i T T j ) EC=\sum\eta_{i,j,k}(\mu_is_{i,j,k}+\nu_iTT_j) EC=∑ηi,j,k(μisi,j,k+νiTTj)
任务风险:
T R = ∑ η i , j , k s i , j , k μ i M M i TR=\sum\eta_{i,j,k}\frac{s_{i,j,k}\mu_i}{MM_i} TR=∑ηi,j,kMMisi,j,kμi
3.城市区域监控
任务分组适应性调整
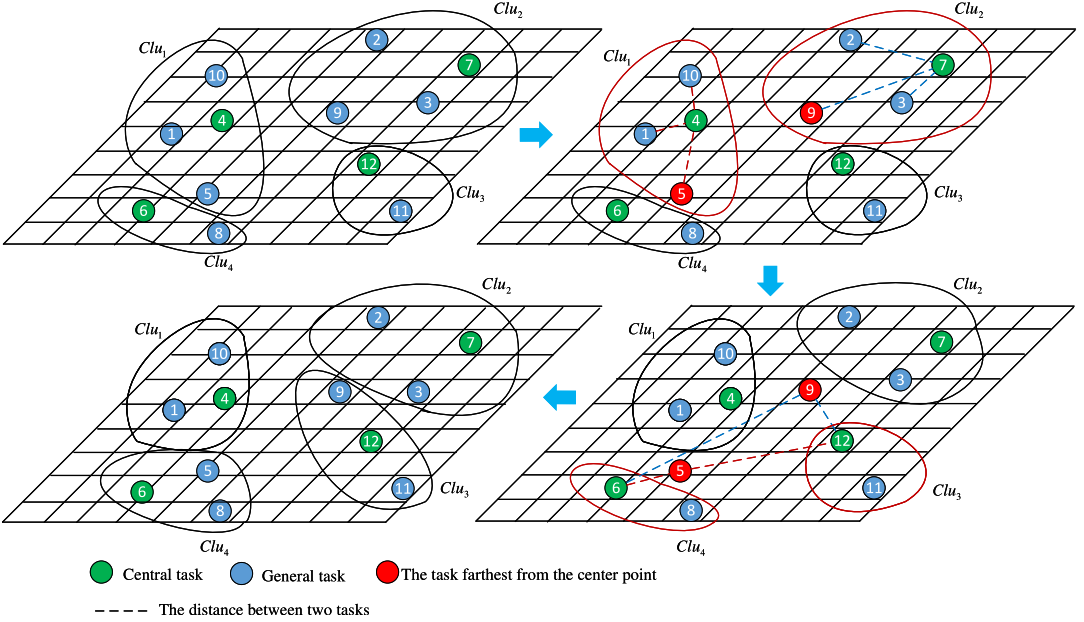
针对任务数量增加导致解空间指数增长的问题,基于任务位置与资源需求采用密度峰值(DP)聚类进行初始分组,使聚类数等于无人机数量。为避免聚类后任务分配不均,引入 mean-DP 调整机制,使每架无人机分配任务数接近平均值:
N A V G = ⌈ M N ⌉ N_{AVG}=\left\lceil\frac{M}{N}\right\rceil NAVG=⌈NM⌉
当某类任务数过多时,根据归一化资源差与空间距离计算综合距离:
D c i , T k = R D c i , T k n o r m + d i s c i , T k n o r m D_{c_i,T_k}=RD_{c_i,T_k}^{norm}+dis_{c_i,T_k}^{norm} Dci,Tk=RDci,Tknorm+disci,Tknorm
保留距离最近的 N A V G N_{AVG} NAVG个任务,其余重新分配至任务不足的簇,从而实现均衡分组。
任务顺序优化
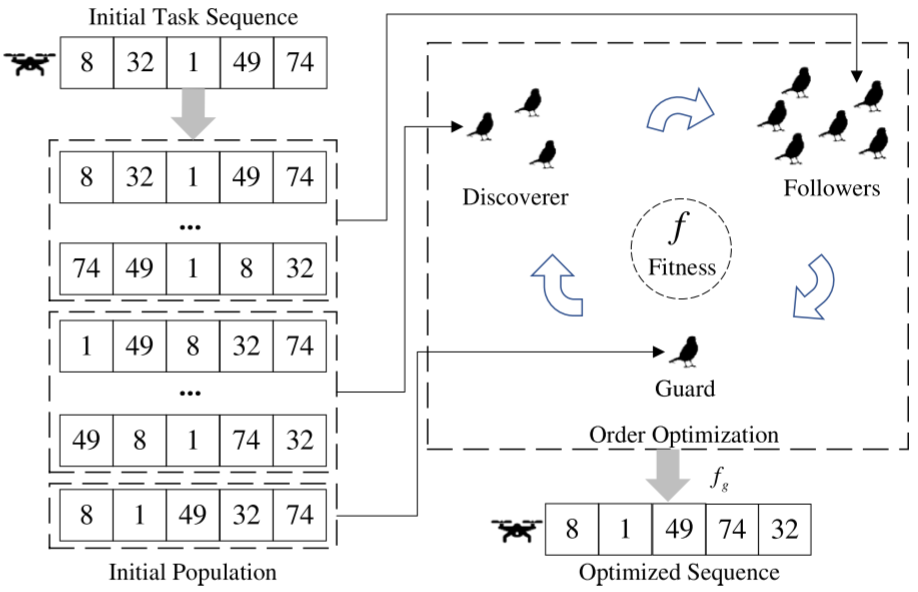
在任务分组完成后,各簇内任务顺序仍然无序,因此引入任务顺序优化阶段以提升无人机执行效率。本文提出改进麻雀搜索算法(SSSA),以任务间距离为优化指标,对每架无人机的任务序列进行迭代优化,从而降低飞行能耗与任务风险。
编队路径规划
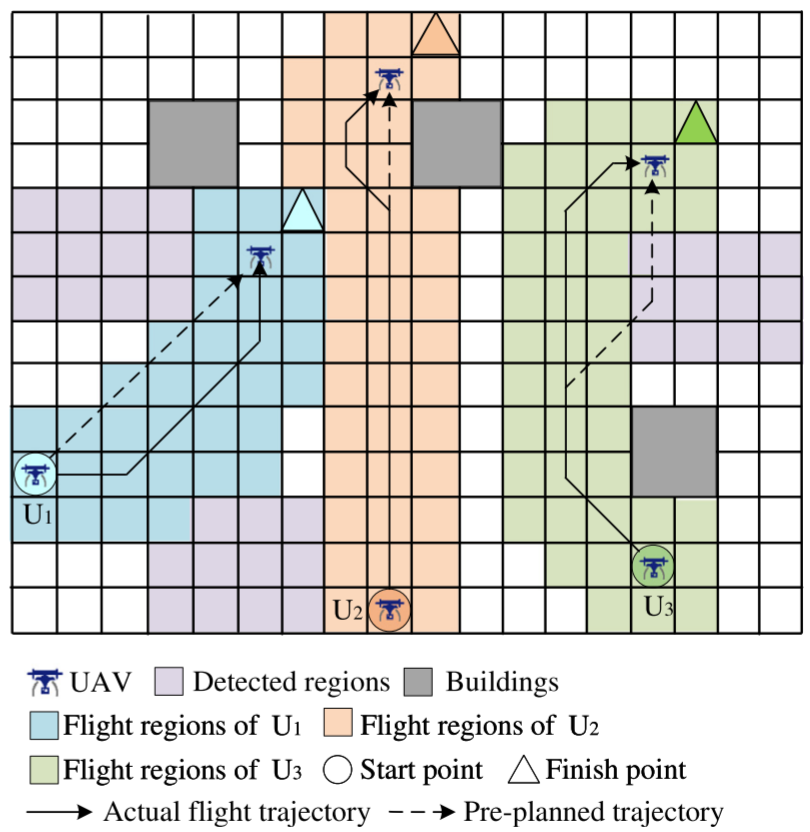
为在局部通信条件下实现高覆盖、低能耗与低风险的编队路径规划,本文提出基于地图共享机制的协同优化方法,在同一通信网络内构建共享栅格矩阵,避免无人机重复探测,提高区域覆盖率。
同一通信网络内的共享栅格矩阵为:
S G M j = ∑ i = 1 N C j , i ⋅ G M i SGM_j=\sum_{i=1}^NC_{j,i}\cdot GM_i SGMj=i=1∑NCj,i⋅GMi
在路径规划中,对传统 Dijkstra 算法的代价矩阵进行改进,将覆盖增益、飞行能耗与任务风险共同纳入代价函数。单位栅格飞行能耗:
E C j = ∑ i = 1 N C j , i ⋅ μ i EC_j=\sum_{i=1}^NC_{j,i}\cdot\mu_i ECj=i=1∑NCj,i⋅μi
单位栅格风险:
S R j = ∑ i = 1 N C j , i ⋅ μ i M M i SR_j=\sum_{i=1}^NC_{j,i}\cdot\frac{\mu_i}{MM_i} SRj=i=1∑NCj,i⋅MMiμi
综合覆盖收益、能耗与风险后,构建改进代价矩阵:
C M j = min ( β 2 E C j + β 3 S R j − β 1 R C M j ) CM_{j}=\min(\beta_{2}EC_{j}+\beta_{3}SR_{j}-\beta_{1}RCM_{j}) CMj=min(β2ECj+β3SRj−β1RCMj)
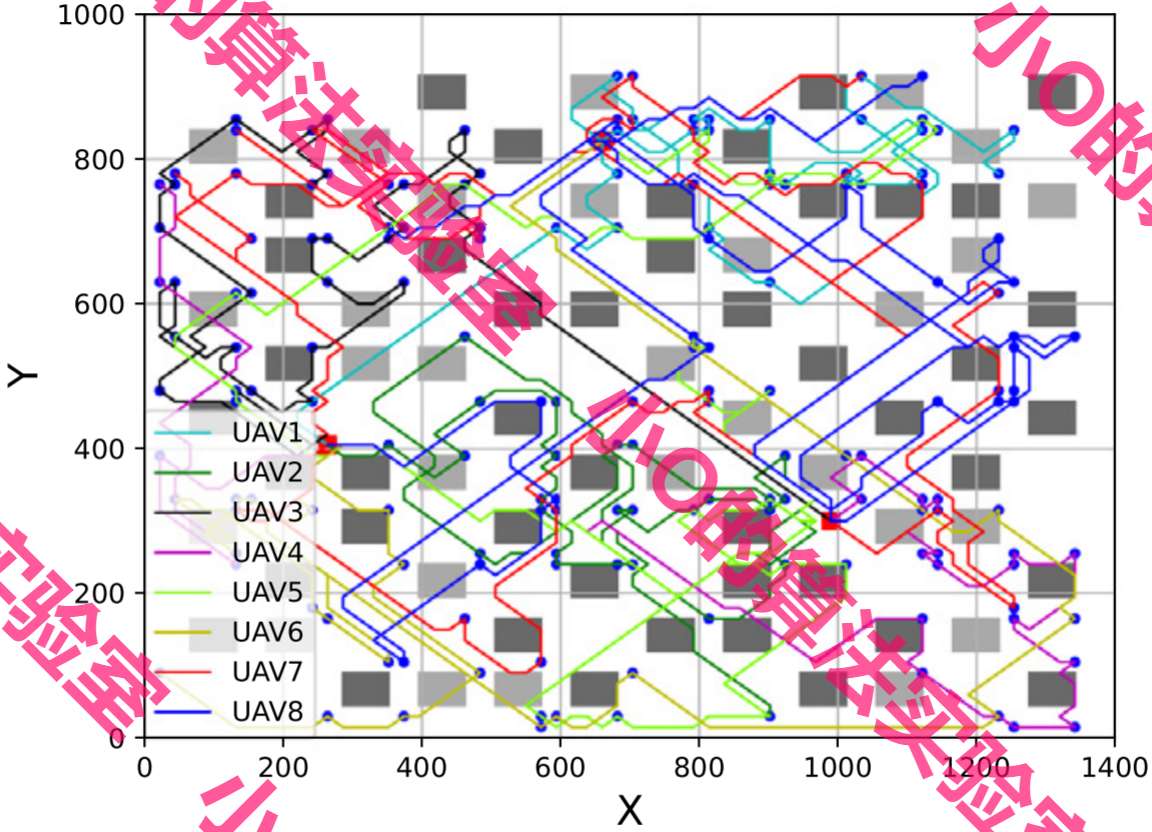
4.结果展示
5.参考文献
1 Fei B, Liu D, Bao W, et al. Task-driven multi-UAV path planning via three-stage optimization strategy for urban region surveillanceJ. Advanced Engineering Informatics, 2025, 68: 103771.
6.代码获取
xx
7.算法辅导·应用定制·读者交流
xx