摘要
针对永磁同步电机(Permanent Magnet Synchronous Motor, PMSM)速度控制中存在的参数摄动、负载扰动及非线性耦合问题,提出基于指数趋近律 的传统滑模变结构控制策略。通过构建线性滑模面,设计指数趋近律解决传统滑模控制收敛速度慢、抖振大的缺陷,结合李亚普诺夫稳定性理论严格证明闭环系统的全局渐近稳定性,最终推导得到 PMSM 速度环滑模控制律。该算法突破传统 PI 控制对电机精确模型的依赖,兼具快速响应特性与强鲁棒性,可广泛应用于高性能伺服驱动、新能源汽车电驱等场景。
引言
PMSM 因功率密度高、效率高、动态响应快等优势,成为工业伺服、新能源汽车、精密机床等领域的核心执行元件。其速度环控制是高性能驱动系统的关键,但 PMSM 存在强耦合、非线性的数学特性,且实际运行中易受负载突变、参数温升漂移等干扰,传统 PI 控制难以兼顾响应速度与抗扰能力。滑模变结构控制 (Sliding Mode Control, SMC)作为一种非线性控制方法,对系统参数变化和外部扰动具有先天鲁棒性,而指数趋近律的引入可有效抑制传统滑模的抖振问题,是 PMSM 速度环高性能控制的优选方案。
PMSM 数学建模
为简化控制设计,采用id=0(最大转矩电流比)控制策略,在 d-q 旋转坐标系下建立 PMSM 核心数学模型:
电压方程

电磁转矩方程

机械运动方程

指数趋近律滑模控制器设计
滑模控制核心原理
滑模控制的核心是构造滑模面,迫使系统状态在有限时间内收敛至滑模面(s=0),并沿滑模面稳定运动。其本质是通过 "变结构" 控制逻辑,让系统对参数扰动和外部干扰不敏感。
滑模面构造
速度环控制目标是使实际转速ωm跟踪指令转速ω∗,定义转速跟踪误差:

物理意义:滑模面将误差e与误差变化率e˙线性组合,确保系统不仅能消除稳态误差,还能快速抑制动态误差。
指数趋近律设计
传统滑模控制采用 "等速趋近律" ,存在收敛慢、抖振大的问题。指数趋近律通过引入指数项实现 "远快近慢" 的自适应收敛,其表达式为:
,存在收敛慢、抖振大的问题。指数趋近律通过引入指数项实现 "远快近慢" 的自适应收敛,其表达式为:
趋近律特性:
当系统远离滑模面(∣s∣大):指数项−ks主导,系统以指数速度快速逼近滑模面;
当系统接近滑模面(∣s∣小):等速项−εsgn(s)主导,避免指数项导致的高频抖振,实现平稳滑动。
控制律推导
滑模面求导:
对滑模面 求导:
求导:
结合误差定义 ,求二阶导数:
,求二阶导数:
对机械运动方程求导,得ωm的二阶导数:
代入电磁转矩导数 ,得:
,得:

工程简化假设
实际工程中,速度指令多为阶跃信号 (如 从 0 跳变至 500rpm),此时
从 0 跳变至 500rpm),此时 同时忽略负载转矩突变
同时忽略负载转矩突变 和摩擦项快速变化
和摩擦项快速变化 ,则:
,则:
求解 q 轴电流指令
将s˙和e¨代入指数趋近律,整理得:

对等式两边积分(离散系统中为累加),最终得到 PMSM 速度环滑模控制的q 轴电流指令(速度环输出,作为电流环输入):

工程限幅:为避免过流,需对iq∗增加饱和限幅(iqmin∗≤iq∗≤iqmax∗),通常取电机额定电流的 80%~100%。
稳定性证明
选取李亚普诺夫函数(正定):
对V求导:

由于ε>0、k>0,则V˙<0恒成立,满足李亚普诺夫稳定性判据,证明系统状态必收敛至滑模面s=0,且收敛后e=0、e˙=0,实现转速无静差跟踪。
控制算法本质分析
核心本质
基于指数趋近律的传统滑模控制是 **"变结构非线性鲁棒控制"**,其核心逻辑可概括为:
不依赖精确模型:控制律仅需电机参数(J、φf)的大致范围,无需精准辨识,对定子电阻温升漂移、转动惯量变化等参数摄动具有强鲁棒性;
自适应收敛特性:指数趋近律通过 "远快近慢" 的策略,兼顾快速响应与抖振抑制,解决传统滑模 "收敛快则抖振大,抖振小则收敛慢" 的矛盾;
主动抗扰能力:滑模面的 "不变性" 特性,使系统在滑模面上运动时,对匹配的外部扰动(如负载转矩突变)完全不敏感。
与传统 PI 控制的对比
| 对比维度 | 传统 PI 控制 | 指数趋近律滑模控制 |
|---|---|---|
| 控制类型 | 线性控制 | 非线性变结构控制 |
| 模型依赖度 | 高(需精确电机参数) | 低(仅需参数范围) |
| 抗扰能力 | 弱(负载突变易超调) | 强(扰动不影响滑模面运动) |
| 动态响应 | 慢(二阶系统欠阻尼特性) | 快(指数收敛) |
| 抖振特性 | 无 | 有(可通过趋近律削弱) |
| 稳态精度 | 高(积分环节消静差) | 高(滑模面强制e=0) |
实际工程应用
典型应用场景
指数趋近律滑模控制 PMSM 速度环因 "快响应、强抗扰" 的特性,适用于对动态性能和鲁棒性要求高的场景:
新能源汽车电驱动系统:应对路况突变(如爬坡、急加速)导致的负载转矩突变,保证转速快速稳定,提升驾驶平顺性;
工业机器人关节驱动:快速跟踪轨迹指令,抑制机械摩擦、连杆扰动,提升定位精度;
高速精密机床主轴:低速大负载下无静差跟踪,抑制切削振动,保证加工精度;
无人机 / AGV 驱动:强电磁干扰、颠簸路况下保持转速稳定,提升运动控制可靠性。
工程落地关键注意事项
抖振抑制 :符号函数sgn(s)是抖振根源,工程中常用饱和函数sat(s) 替代:
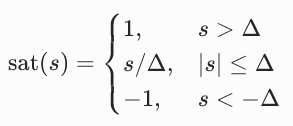
式中Δ为边界层厚度,Δ越大抖振越小,但鲁棒性略有降低,需折中选取;
离散化实现:实际单片机采用离散控制,需将连续趋近律离散化:
 式中Ts为采样时间
式中Ts为采样时间
参数整定:
滑模面系数c:先取较小值(如 100),逐步增大至系统无超调;
指数系数k:匹配系统带宽(如 10kHz 带宽取k=10000);
等速系数ε:从 0 开始逐步增大,至系统无静差且抖振可接受。
结论
基于指数趋近律的传统滑模控制为 PMSM 速度环提供了一种高性能、高鲁棒性的控制方案。通过合理构造滑模面和设计指数趋近律,既解决了传统滑模的抖振问题,又保留了滑模控制抗扰性强的优势。该算法无需精确电机模型,工程实现简单,在高性能伺服驱动、新能源汽车等领域具有广泛的应用价值。实际应用中需重点关注抖振抑制和离散化实现,通过参数折中整定平衡响应速度、鲁棒性与抖振特性。