0 前言
前一节文章中仅仅是从宏观上讨论现有方法值得优化的方向,
但事实上我仅仅对现有方法的参数影响进行了仿真分析。具体现有观测器到底有什么不足没有只管的感受,仅仅停留在文字层面,因此本节将完成这个任务------进一步探究观测器的性能,寻找其限制点。
1 现有观测器的缺陷到底是什么?
我们仍然以LESO为基础讨论对象,暂且不考虑比例因子不确定性造成的影响。我们评价一个电流控制器主要分为以下几个维度。电流阶跃指令响应速度或者电流环带宽、稳态跟踪误差、稳态idiq波动、稳态相电流THD大小。其实也有别的细分的指标,例如全工况的适应性,这个暂且我们不考虑,仅针对以上四个指标进行讨论。
1.1 电流阶跃指令响应速度
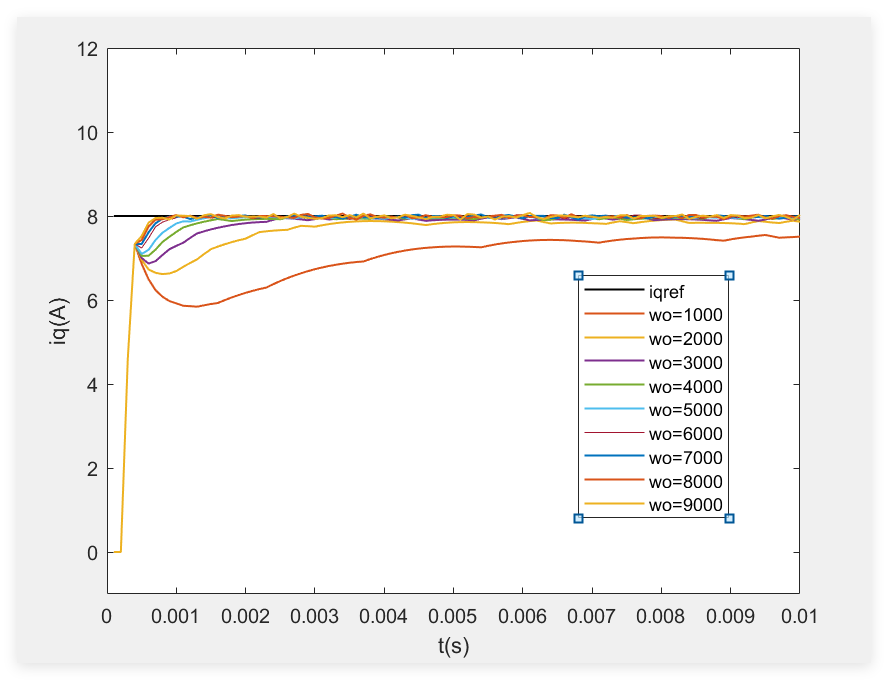
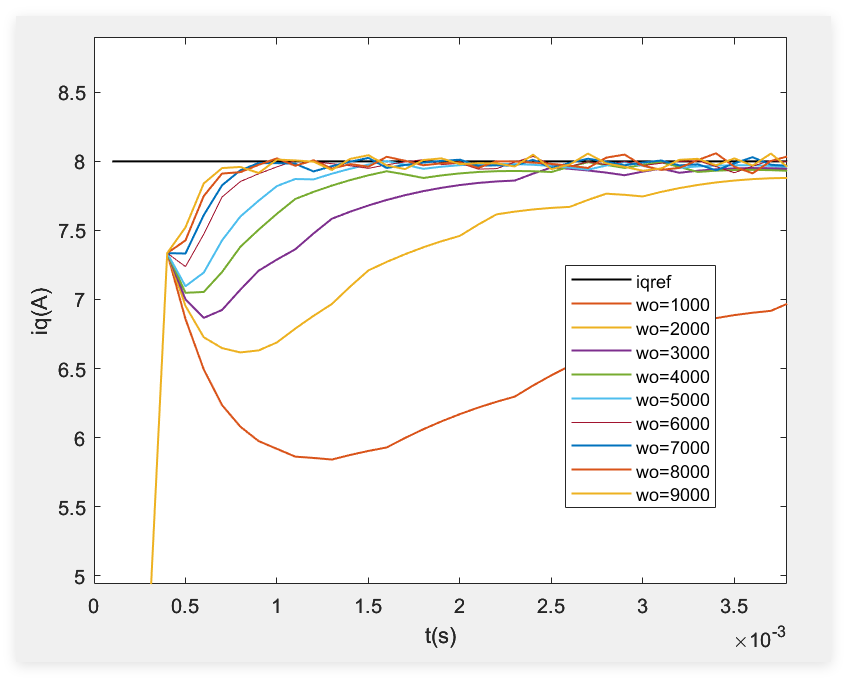
对标称控制器增益的前提下,不同带宽的系统响应速度进行测试。可以看到确实是随着带宽参数越高,系统响应速度越快,我们还能看到的一个现象:在标称参数下,电流跟踪是完全无超调的。
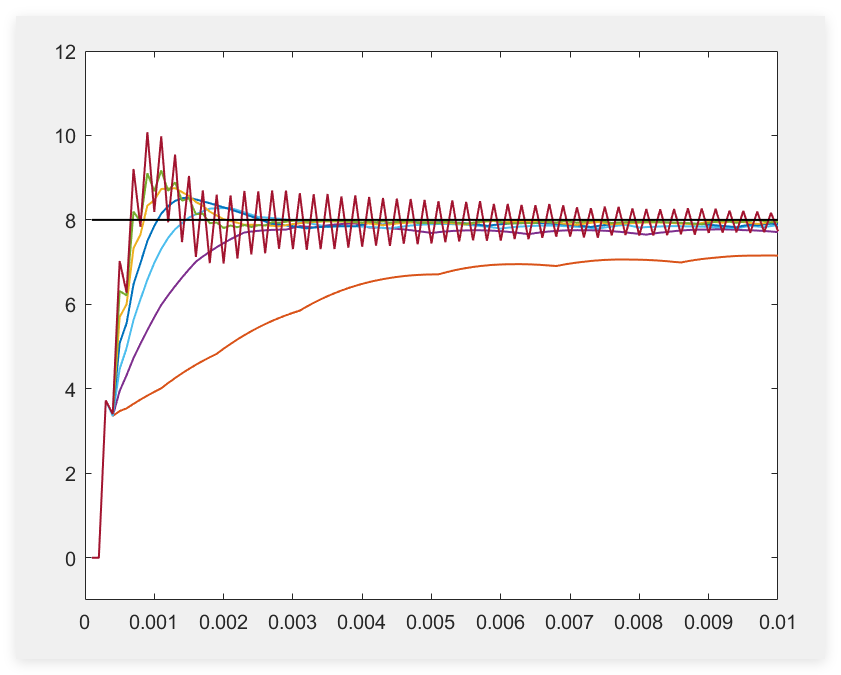
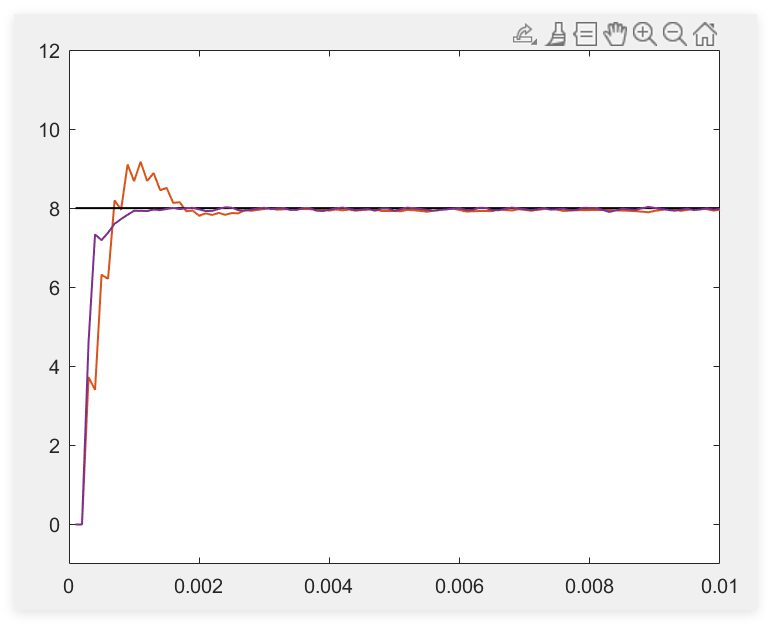
在两倍标准控制器增益下,不同带宽的性能表现如下,图中振荡最为剧烈的带宽为7000rad/s,而开始出现振荡的点是6000rad/s,其放大图也放在了下面。我们可以看到一个现象:两倍标准控制器增益下,随着带宽增大,系统的响应速度增大,但是更为明显的是超调也会增大,同时系统会出现振荡现象。
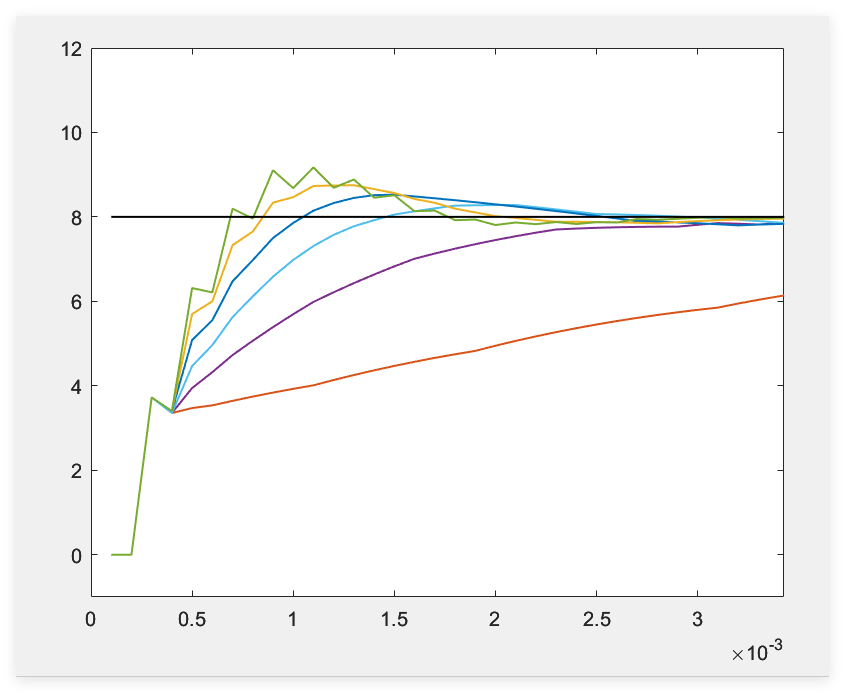
当我们把相同带宽,不同控制器增益的对比效果放在下图,下图观测器带宽均为6000rad/s,但是控制器的增益为标准值和两倍标准值,可以看到标准值情况下既无超调也跟随更快,但是非标准值则存在明显超调,跟随更慢,且调节时间更长。
从以上现象我们可以总结一个关键的缺陷:现有基于ESO观测器架构,对控制器增益的鲁棒性不强,整体控制器的表现受控制器增益影响严重。
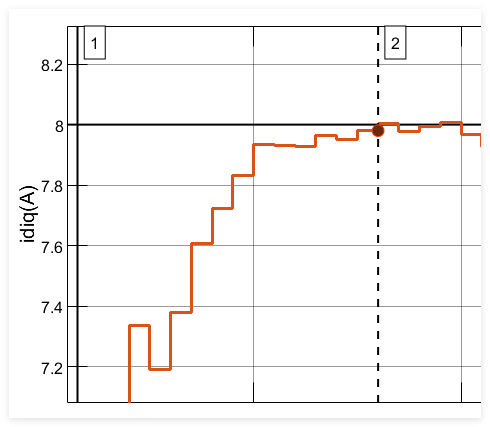
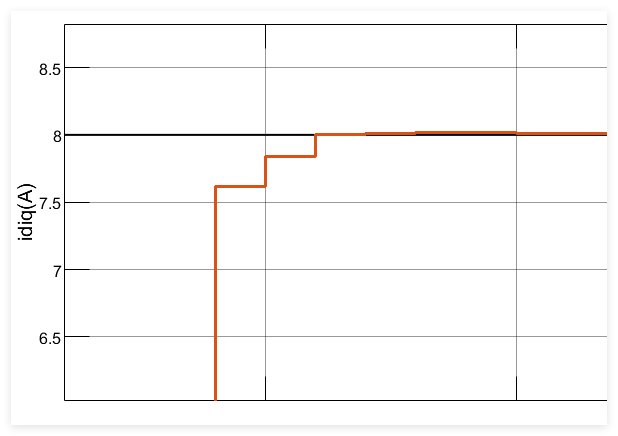
另一个方面如果完全从电流指令跟踪速度的角度考虑,从接受到iqref指令,总共经过16个控制周期完成跟随。假如对比参数准确的DPCC;可得:
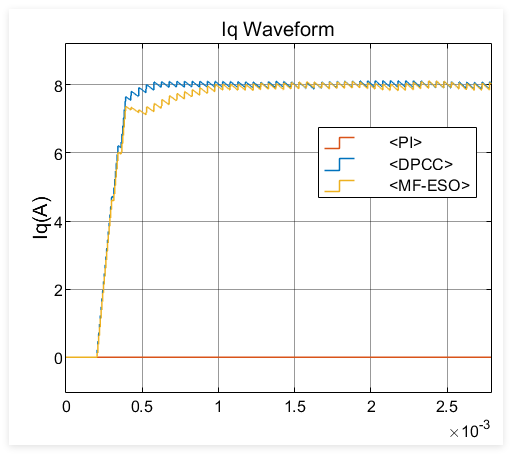
两者绘制在同一张图中可以得到如下对比效果,但是这是DPCC在参数绝对准确的情况,这在实际实验过程中基本不可能实现。两个实现的逻辑和架构是不相同的,DPCC属于是直接计算出来集总扰动项,而MF-ESO是通过观测得到集总扰动项,直接算显然更快一些,这是观测器存在的天然劣势。
1.2 稳态跟踪误差
稳态跟踪误差MF-ESO不存在劣势,即使在参数一定程度失配的情况,其稳态跟随无静态误差。
1.3 稳态idiq波动 和 稳态相电流THD大小
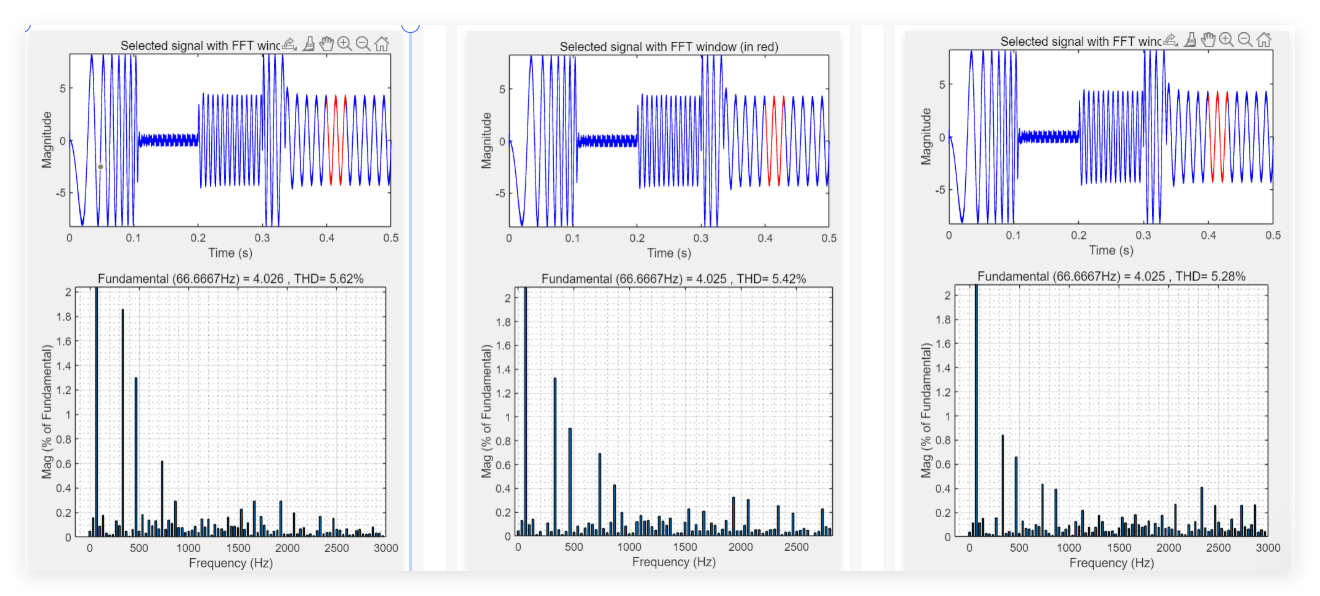
这两者通常是一起的,在增益参数不变的情况下,以上指标通常由带宽大小决定。带宽越宽,所能抑制的谐波频段越高,能够取得更好的谐波抑制效果。我们观察不同带宽的额定负载1000rpm的FFT分析结果。下图分别为带宽4000、6000、8000的FFT分析结果,其中5、7、11、13次谐波会随着带宽的增大逐渐幅值减小,同时电流THD也在减小。
也就是从上面的分析,我们可以从两个维度对观测器性能进行优化。这是更加具体的描述,第一个是观测器对扰动观测的收敛速度,第二个是对高频谐波的抑制。这个时候我也不禁问自己,那这个不都可以用提高带宽来解决吗?为什么还需要去纠结什么事情。这就需要回到我们之前梳理的结果去分析,虽然带宽提高既有助于提高扰动的观测速度,提高电流跟踪的速度,且有利于谐波的抑制,降低idiq波动降低电流THD。但是过高的观测器带宽也会导致系统对控制器增益的准确性极高,越高的带宽越需要精准的控制器增益。整体系统比例增益稳定区间会随着带宽增大而快速减小。
2 整体提炼问题
假如用我们考研的时候经常背诵的句式,那么整体问题为:逐渐增长的更快电流跟踪、更优秀谐波抑制能力的需求与系统稳定性之间的矛盾。我相信对于我这种刚开始看的同志来说,这个问题的定位一定在前沿的学术研究中有人进行了解决。从下一篇文章开始review观测器改造方案相关的论文。