文章目录
- 论文精读笔记
- [一、论文核心问题(What is the paper about)](#一、论文核心问题(What is the paper about))
- [二、应用场景与任务定义(Why it matters)](#二、应用场景与任务定义(Why it matters))
-
- [1. 四大应用任务(图1)](#1. 四大应用任务(图1))
- [2. 作业流程(图2)](#2. 作业流程(图2))
- [三、核心技术模块拆解(Main technical framework)](#三、核心技术模块拆解(Main technical framework))
-
- [(1)几何约束(Geometry constraints)](#(1)几何约束(Geometry constraints))
- [(2)运动方式(Locomotion methods)](#(2)运动方式(Locomotion methods))
- [(3)变径适应机制(Adaptive mechanism)](#(3)变径适应机制(Adaptive mechanism))
- (4)转向系统(Steering)
- [(5)定位与导航(Localization & navigation)](#(5)定位与导航(Localization & navigation))
- 四、论文的核心结论
- [五、论文贡献总结(What this paper contributes)](#五、论文贡献总结(What this paper contributes))
- 六、对研究的启发
论文精读笔记
题目 :A comprehensive review of in-pipe robots
类型 :综述论文(Review)
核心定位:管内机器人"机构 + 运动 + 导航"的系统性综述
一、论文核心问题(What is the paper about)
这篇文章试图回答一个非常工程化的问题:
在复杂管道环境中,机器人如何实现稳定移动与有效作业?
作者把这个问题拆成五个子问题:
- 几何约束(能不能通过)
- 运动方式(怎么走)
- 变径适应(不同管径怎么办)
- 转向系统(如何过弯/分支)
- 定位导航(如何知道自己在哪)
关键理解 :
这篇文章认为------
管内机器人首先是一个"受几何强约束的移动机器人问题",而不是AI问题。
二、应用场景与任务定义(Why it matters)
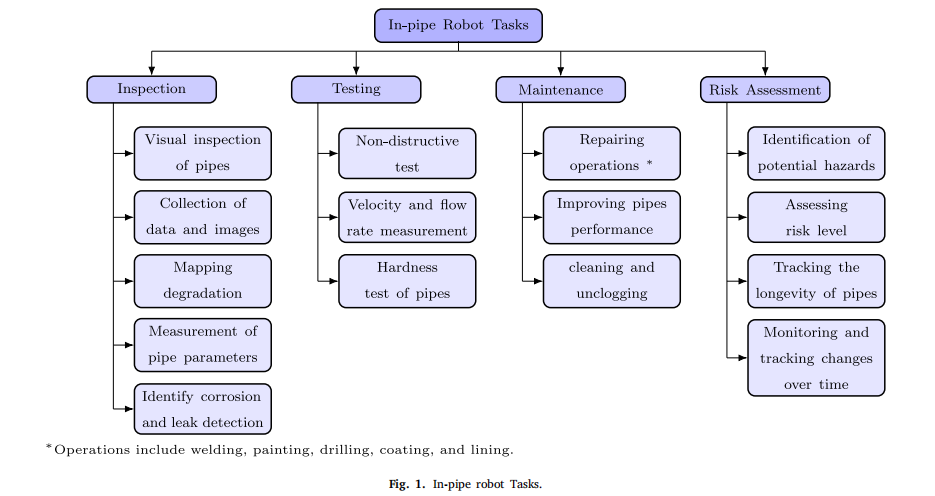
1. 四大应用任务(图1)
- 检测:视觉检查、腐蚀/泄漏识别、参数测量
- 测试:无损检测、流量/硬度测试
- 维护:修复、清洗
- 风险评估:寿命预测、隐患分析
2. 作业流程(图2)
部署 → 导航 → 检测 → 分析 → 维护 → 通信 → 回收 → 报告
关键点:
- 机器人不是单纯"移动",而是嵌入一个完整工业流程
- 导航只是中间环节,不是终点

三、核心技术模块拆解(Main technical framework)
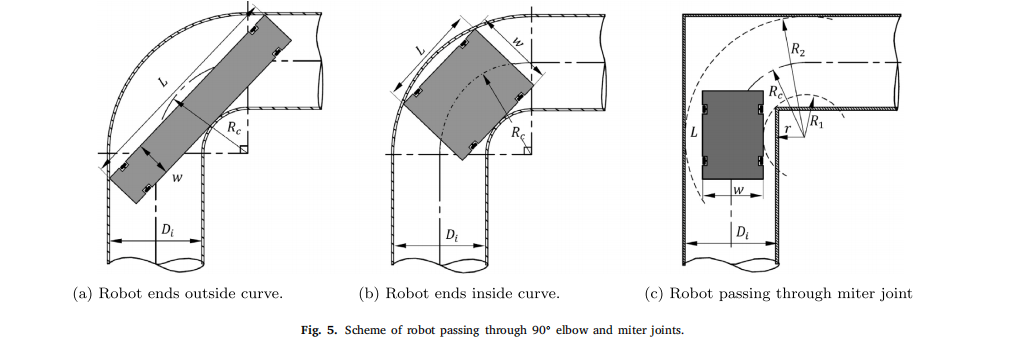
(1)几何约束(Geometry constraints)
关键问题:
机器人能不能通过管道?
影响因素:
- 管径
- 弯头(90° elbow)
- 分支(T-junction)
- 异形连接(miter joint)
重要结论:
- 直管:长度 ≈ 1--1.75 × 管径
- 有弯头/分支:尺寸必须重新设计
理解 :
这是"第一性问题",决定机器人是否可用。
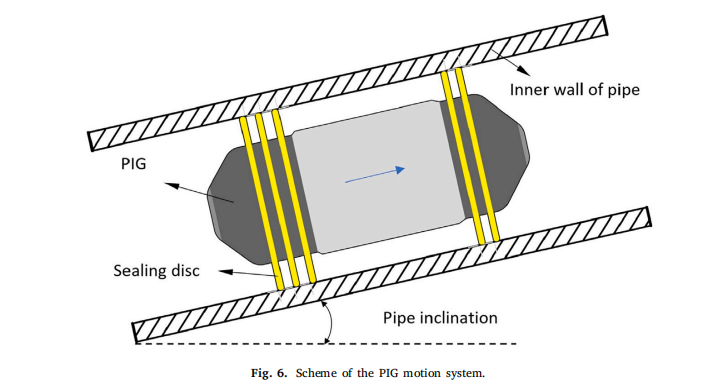
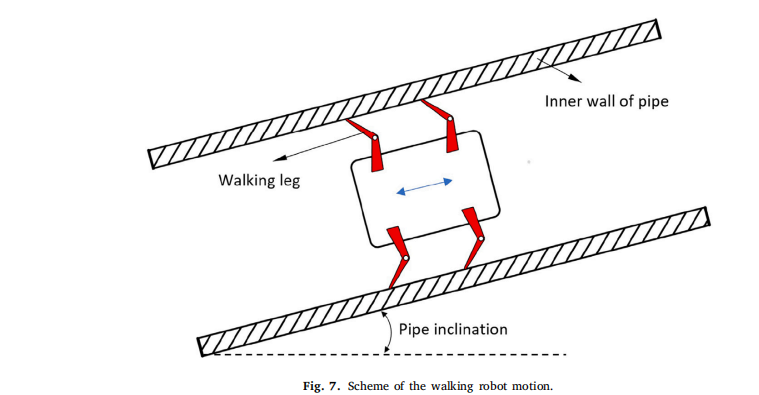
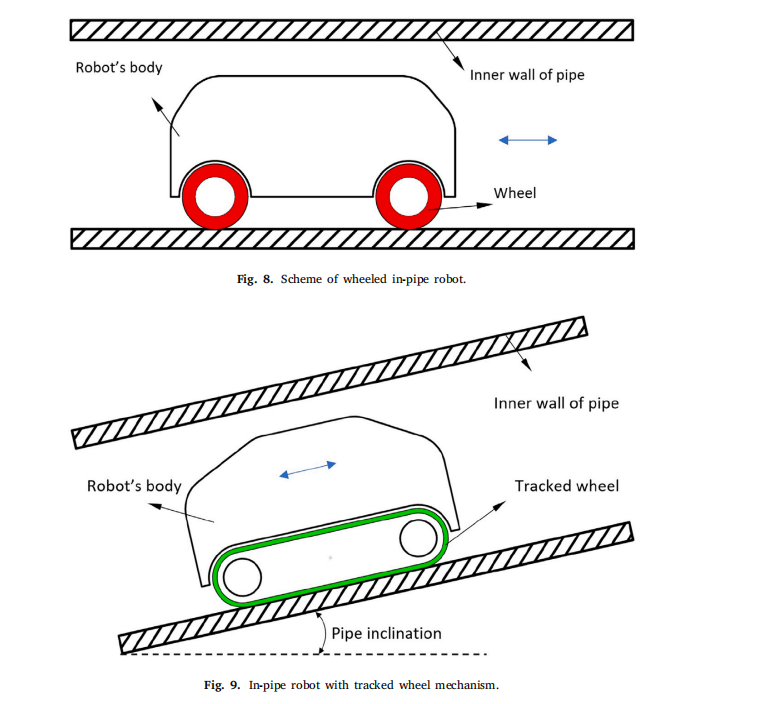
(2)运动方式(Locomotion methods)
分类:
有轮类
- 轮式
- 履带式
- 壁压式
- 螺旋式
无轮类
- PIG
- 步行式
- 尺蠖式
核心对比总结(表3)
| 类型 | 优点 | 缺点 |
|---|---|---|
| PIG | 长距离、高速 | 不可控、无法主动转向 |
| 轮式 | 简单、快 | 地形适应差 |
| 履带 | 抓地强 | 慢、空间占用大 |
| 壁压 | 稳定、可变径 | 转向差、结构复杂 |
| 步行 | 牵引强、越障好 | 复杂、耗能高 |
| 尺蠖 | 紧凑 | 速度慢 |
| 螺旋 | 长距离好 | 对管形要求高 |
工程结论:
- 长距离 → PIG / 螺旋
- 复杂管网 → 壁压 / 多关节
- 粗糙环境 → 履带 / 步行
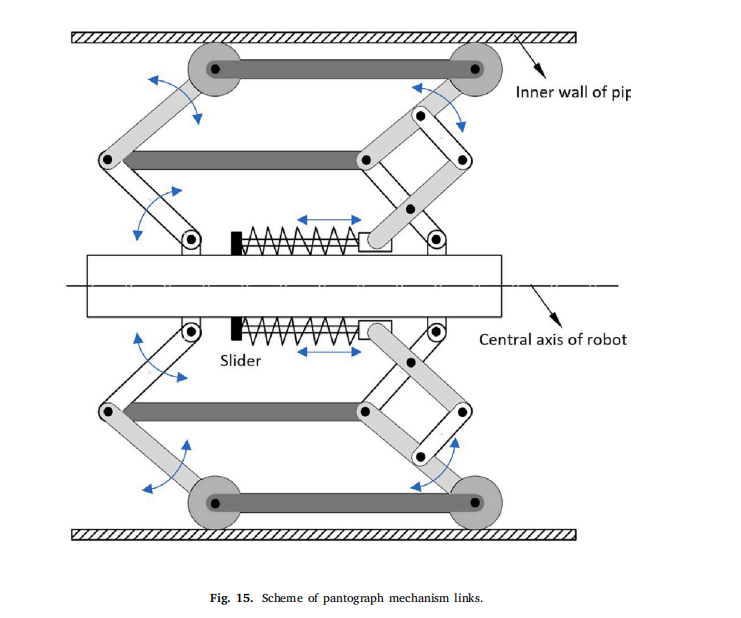
(3)变径适应机制(Adaptive mechanism)
为什么重要:
现实管道:
- 变径
- 不规则
- 有沉积/腐蚀
必须能"自适应直径"
三类主流机构
| 机构 | 特点 |
|---|---|
| 曲柄滑块 | 简单、力大、范围小 |
| 平行四边形 | 精度高、范围大 |
| Pantograph | 紧凑、伸缩能力强 |
工程选择逻辑:
- 小型 → 曲柄滑块
- 稳定控制 → 平行四边形
- 大范围变径 → pantograph
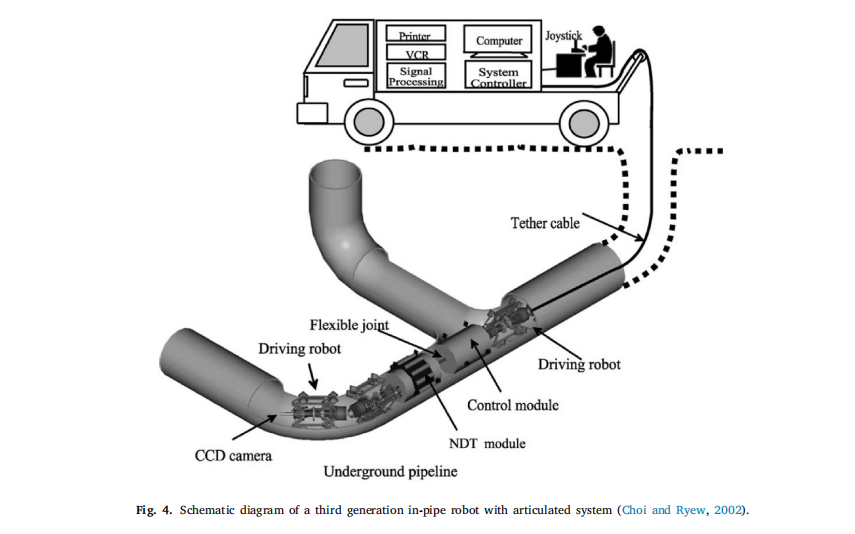
(4)转向系统(Steering)
三类方式:
- 差速转向
- 四轮转向
- 关节式转向
最关键结论:
关节式(articulated)最适合复杂管网
原因:
- 可分模块(电池/传感/控制分离)
- 易通过弯头和分支
- 适合长距离任务
理解:
- 单体机器人 → 适合直管
- 多关节机器人 → 适合"网络管道"
(5)定位与导航(Localization & navigation)
四类方法:
- 传感器方法
- 算法方法
- 通信方法
- GPS方法
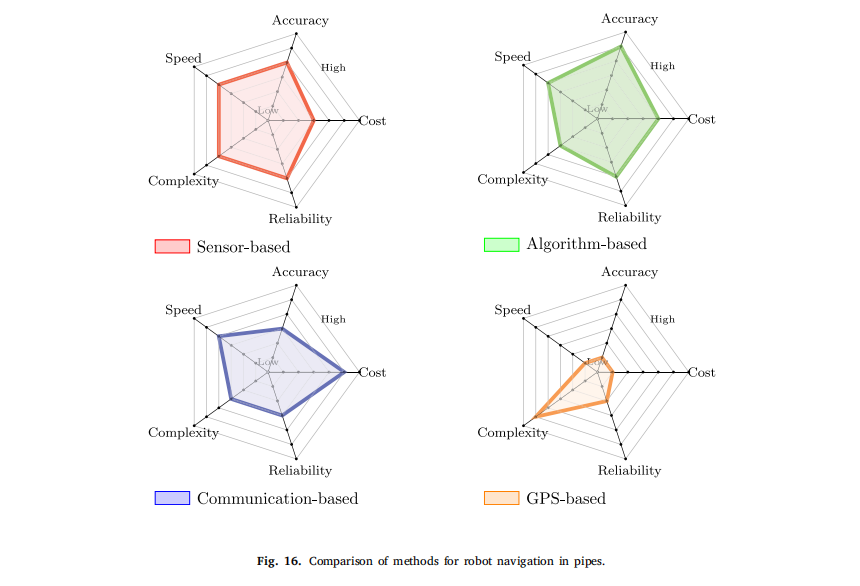
关键结论:
GPS 在管道中基本不可用
(信号衰减、多路径问题)
传感器方法(表8)
| 方法 | 特点 |
|---|---|
| 里程计 | 简单但累积误差 |
| IMU | 姿态好但漂移 |
| 声学 | 长距离可用 |
| 磁通信 | 可穿介质 |
| 激光 | 精度高但贵 |
算法方法(表9)
| 方法 | 特点 |
|---|---|
| Kalman | 线性高斯 |
| Particle | 非线性强 |
| SLAM | 同时建图定位 |
| AI | 学习能力强 |
| 模糊控制 | 鲁棒但经验性 |
关键理解:
真正有效的是:
多传感器融合 + SLAM/滤波
四、论文的核心结论
作者认为未来重点在:
- 复杂管网中的精确导航
- 机器人可靠性与耐久性
- 更先进的传感与视觉系统
五、论文贡献总结(What this paper contributes)
优点
- 构建了完整技术框架(5大模块)
- 提供大量"优缺点对比表"(很实用)
- 强调导航是核心问题
- 兼顾机构 + 控制 + 感知
局限
- AI/智能部分较浅
- 缺少算法性能比较
- 缺乏统一评价指标
- 应用层(如缺陷检测)不足
六、对研究的启发
如果方向是:
具身智能 + 管网巡检机器人
身体先于智能
通过性 > 智能性
没有可靠运动平台,AI没有意义
真正的研究方向是"系统耦合"
不是单点突破,而是:
机构 + 控制 + 感知 + 决策
管网是"弱感知环境"
特点:
- 无GPS
- 视觉受限
- 通信困难
更适合:
- 多传感融合
- 约束环境智能
最有潜力方向
关节式 + 壁压结构 + 多传感融合 + SLAM/AI