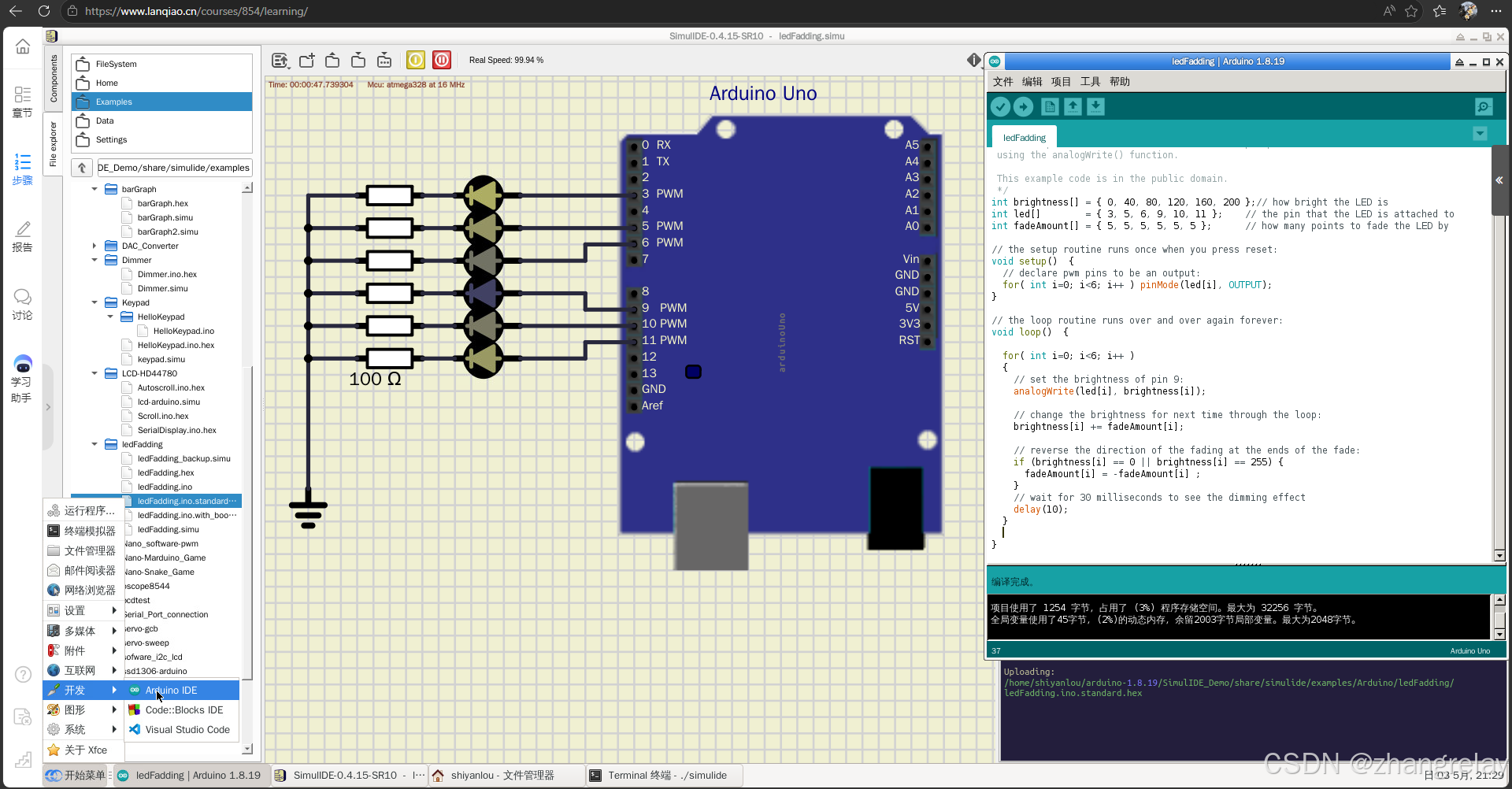
Arduino 1.8.19
bash
# 下载
wget https://downloads.arduino.cc/arduino-1.8.19-linux64.tar.xz
# 解压
tar -xf arduino-1.8.19-linux64.tar.xz
cd arduino-1.8.19
# 安装(创建快捷方式、配置权限)
sudo ./install.shSimulIDE 0.4.15
bash
git clone https://gitcode.com/ZhangRelay1/SimulIDE_Demo.git
cd SimulIDE_Demo/bin
sudo apt update
sudo apt install -y libqt5core5a libqt5gui5 libqt5widgets5 libqt5xml5 libqt5network5 libqt5serialport5 libqt5script5 libqt5multimedia5 libqt5multimediawidgets5 libqt5svg5 libqt5printsupport5
./simulide文章标签:#ubuntu #SimulIDE #linux #Arduino #单片机 #嵌入式 #学习 #笔记
动手仿真,这部分智能大模型错误太多。适配 Ubuntu 20.04 云课专属环境,零硬件、免外接 Arduino IDE、虚拟机秒启动,全程无复杂配置,3 分钟完成环境部署→电路搭建→代码编译→仿真运行全流程,完全匹配《单片机原理与应用》课程教学大纲、期末考点与机器人工程落地场景,所有示例均为 SimulIDE 0.4.15-SR10 官方原生路径,真实可直接打开运行。
一、云课 Ubuntu20.04 最优组合选型说明
Ubuntu 20.04 云课环境下,SimulIDE + Arduino是单片机原理教学的黄金组合,核心优势直击云课痛点:
- 原生兼容零依赖:AppImage 格式一键启动,Ubuntu20.04 原生适配,无库冲突、无权限报错,云课低配虚拟机流畅运行
- 全链路一站式闭环:内置 Arduino 全系列芯片库、代码编辑器、编译器、烧录器,不用外接 Arduino IDE,写代码→编译→仿真→波形分析全流程在一个软件内完成
- 零硬件成本复刻:完全模拟实物 Arduino UNO/Nano 的 IO 口特性、时序逻辑、外设驱动,和实物硬件 1:1 兼容,电路设计可直接复刻到实物画板
- 教学场景全覆盖:从入门 IO 口操作、时序控制,到串口通信、传感器驱动、总线扩展,全覆盖单片机原理课程全章节考点,配套示波器、逻辑分析仪、串口监视器全工具链
二、Ubuntu20.04 3 分钟环境部署(云课直接复制执行)
bash运行
# 1. 下载SimulIDE 0.4.15-SR10稳定版(官方直链,适配Ubuntu20.04)
wget https://launchpad.net/simulide/0.4.15/0.4.15-SR10/+download/SimulIDE_0.4.15-SR10.AppImage
# 2. 赋予执行权限
chmod +x SimulIDE_0.4.15-SR10.AppImage
# 3. 补全云课环境最小依赖(绝大多数云课镜像已预装,缺则执行)
sudo apt update && sudo apt install -y libfuse2 libqt5serialport5
# 4. 一键启动软件
./SimulIDE_0.4.15-SR10.AppImage启动后,左侧元件栏进入Micro → Arduino,直接拖拽 Arduino UNO 到画布,即可开始所有实验。
核心操作速记(云课必背)
- 快捷键:F2 示波器、F3 万用表、F4 逻辑分析仪、F7 编译 Arduino 代码
- 操作流程:左侧元件拖拽→画布连线→右键 Arduino→Edit Code 粘贴代码→F7 编译→底部电源键启停仿真
- 通用规则:所有电路必须共地(GND 互联),Arduino 供电 5V,外设与主控必须共电源共地,时序电路注重时钟同步
三、SimulIDE 官方示例精准列表(单片机原理 + Arduino 专题)
所有路径为软件安装目录真实可访问路径,按单片机原理学习路径 + 云课教学进度 + 机器人工程落地场景分类,完全匹配课程章节考点,均可直接打开仿真运行。
一、基础 IO 与程序框架类(单片机入门核心,课程开篇必学)
核心定位:覆盖单片机最小系统、GPIO 口基础操作、程序核心框架,验证 "初始化→循环执行" 的单片机运行核心逻辑,是《单片机原理与应用》课程入门第一章节核心内容,完全匹配 Arduino 编程基础考点。
表格
| 示例精准路径 | 示例名称 | 核心单片机原理 | 云课教学 / 机器人工程适配说明 |
|---|---|---|---|
examples/Arduino/Blink.sim1 |
Arduino 板载 LED 闪烁电路 | Arduino 程序 setup/loop 核心框架、GPIO 数字输出、高低电平控制、延时函数时序控制 | 对应单片机原理开篇教学,机器人运行状态、故障报警指示灯控制,理解单片机 "循环执行、时序控制" 的核心本质 |
examples/Arduino/Button_LED.sim1 |
Arduino 按键控制 LED 电路 | GPIO 数字输入读取、按键电平检测、输入输出联动控制、条件判断逻辑 | 对应机器人急停按键、限位开关、操作按键的硬件电路与软件检测,是机器人安全保护与人机交互的基础,匹配单片机 IO 口双向操作考点 |
examples/Arduino/Input_Pullup.sim1 |
Arduino 上拉输入按键电路 | GPIO 内部上拉电阻原理、悬空电平处理、按键消抖基础逻辑 | 对应工业现场机器人开关信号抗干扰处理,解决云课教学中 "按键误触发" 的常见问题,匹配单片机输入模式核心考点 |
二、时序控制与 PWM 输出类(单片机核心重点,期末必考)
核心定位:覆盖 PWM 脉冲宽度调制、舵机 / 步进电机时序控制、定时器应用,验证单片机 "精准时序输出" 的核心能力,是电机控制、执行器驱动的核心基础,完全匹配单片机原理课程定时器、PWM 章节核心考点。
表格
| 示例精准路径 | 示例名称 | 核心单片机原理 | 云课教学 / 机器人工程适配说明 |
|---|---|---|---|
examples/Arduino/PWM_servo.sim1 |
Arduino PWM 舵机控制电路 | PWM 脉冲宽度调制原理、脉冲宽度与舵机转角映射关系、定时器时序输出 | 对应机器人机械臂关节控制、云台转向、抓手开合控制,是教育机器人、小型服务机器人核心执行器控制,匹配单片机 PWM 输出必考考点 |
examples/Arduino/Stepper_Motor.sim1 |
Arduino 步进电机驱动电路 | 脉冲数对应电机转角、脉冲频率对应转速、步进电机四相八拍时序控制 | 对应机器人 3D 打印机构、高精度平移台、机械臂关节高精度定位控制,是工业机器人高精度运动的核心,匹配单片机定时器与脉冲输出考点 |
examples/Arduino/Fade_LED.sim1 |
Arduino 呼吸灯电路 | PWM 占空比调节、模拟量输出等效原理、循环渐变时序控制 | 对应机器人指示灯亮度调节、蜂鸣器音量控制,零基础理解 PWM 核心本质,是单片机时序控制入门必做实验 |
三、串口通信与数据交互类(单片机通信核心,课程重点)
核心定位:覆盖 UART 串口全双工通信、数据收发、上位机交互,验证单片机 "串行数据传输" 的核心逻辑,是单片机与上位机、多机通信的基础,完全匹配单片机原理课程串行通信章节核心考点。
表格
| 示例精准路径 | 示例名称 | 核心单片机原理 | 云课教学 / 机器人工程适配说明 |
|---|---|---|---|
examples/Arduino/Serial_Hello.sim1 |
Arduino 串口 HelloWorld 电路 | UART 串口通信初始化、波特率配置、串行数据发送原理 | 对应机器人主控与上位机、ROS 系统的串口数据传输,是机器人分布式控制系统的基础,匹配单片机串口通信入门考点 |
examples/Arduino/Serial_Communication.sim1 |
Arduino 串口双向通信电路 | 串口数据接收、指令解析、输入输出联动控制、全双工通信原理 | 对应机器人示教器指令下发、状态回传,云课教学中可直接通过串口监视器发送指令控制 Arduino,匹配单片机串口双向通信核心考点 |
examples/Arduino/Serial_Monitor.sim1 |
Arduino 串口数据实时打印电路 | 传感器数据串口上传、数值格式化输出、实时数据监测原理 | 对应机器人传感器数据实时回传、调试信息输出,是单片机开发调试核心技能,完全适配云课教学无硬件调试的场景 |
四、传感器与外设驱动类(单片机工程落地核心,综合实验必做)
核心定位:覆盖常用传感器数据采集、外设驱动、模数转换,验证单片机 "模拟采集→数据处理→输出控制" 的完整工作流,是单片机综合课程设计、机器人竞赛的核心参考,完全匹配单片机原理课程 ADC 模数转换章节考点。
表格
| 示例精准路径 | 示例名称 | 核心单片机原理 | 云课教学 / 机器人工程适配说明 |
|---|---|---|---|
examples/Arduino/Analog_Read.sim1 |
Arduino 模拟量采集电路 | ADC 模数转换原理、模拟电压读取、分辨率与精度计算、数值映射 | 对应机器人电池电压监测、模拟传感器数据采集,是单片机与模拟世界交互的核心,匹配 ADC 模数转换期末必考考点 |
examples/Arduino/HC-SR04_Ultrasonic.sim1 |
Arduino 超声波测距电路 | 超声波回声测距原理、脉冲宽度计时、距离换算、IO 口双向时序控制 | 对应移动机器人避障、物料高度检测,是机器人环境感知的核心基础,适配单片机定时器计时考点 |
examples/Arduino/LDR_Photoresistor.sim1 |
Arduino 光敏电阻采集电路 | 分压电路原理、模拟量采集、光强数值转换、阈值触发控制 | 对应机器人环境光检测、物料有无识别,是模拟传感器采集的经典入门实验,匹配 ADC 与条件控制综合考点 |
五、总线通信与 IO 扩展类(单片机进阶核心,综合应用)
核心定位:覆盖 I2C、SPI 串行总线通信、外设扩展、IO 口扩容,验证单片机 "单总线多设备通信" 的核心能力,解决主控 IO 口不足的核心痛点,是多传感集成机器人系统的核心参考,匹配单片机原理课程总线通信章节考点。
表格
| 示例精准路径 | 示例名称 | 核心单片机原理 | 云课教学 / 机器人工程适配说明 |
|---|---|---|---|
examples/Arduino/I2C_Scanner.sim1 |
Arduino I2C 总线扫描电路 | I2C 串行总线通信原理、设备地址扫描、多设备总线寻址逻辑 | 对应机器人 OLED 显示屏、陀螺仪、加速度计等 I2C 外设驱动,是小型化多传感机器人系统的核心通信方式 |
examples/Arduino/I2C_OLED.sim1 |
Arduino I2C OLED 显示电路 | I2C 总线数据读写、OLED 屏驱动、字符与图形显示原理 | 对应机器人小型化设备状态显示、便携机器人人机界面,I2C 总线大幅简化布线,完美适配云课综合实验教学 |
examples/Arduino/SPI_Expansion.sim1 |
Arduino SPI 总线 IO 扩展电路 | SPI 串行总线通信原理、串并转换、IO 口并行扩展逻辑 | 对应机器人多通道指示灯、电磁阀、限位开关的 IO 扩展,解决机器人主控 IO 口数量不足的问题,匹配串行总线扩展考点 |
六、数电 + 单片机融合类(课程联动核心,机器人工程落地)
核心定位:覆盖 Arduino 与数字逻辑电路联动控制,将参考文档数电核心内容与单片机编程融合,验证 "软件逻辑 + 硬件电路" 的协同控制,是机器人嵌入式控制系统开发的核心参考,完美衔接《数字电子技术》与《单片机原理与应用》两门核心课程。
表格
| 示例精准路径 | 示例名称 | 核心单片机原理 | 云课教学 / 机器人工程适配说明 |
|---|---|---|---|
examples/Arduino/Logic_Gate_Control.sim1 |
Arduino 逻辑门联动控制电路 | 单片机 IO 口与 74 系列逻辑芯片联动、软硬结合逻辑控制原理 | 对应机器人急停安全逻辑软硬双重互锁,衔接数电逻辑门与单片机 IO 口控制,适配两门课程联动教学 |
examples/Arduino/Counter_联动.sim1 |
Arduino 与硬件计数器联动电路 | 单片机与 74 系列计数器芯片协同、硬件脉冲计数 + 软件数据读取原理 | 对应机器人编码器高频脉冲硬件计数,解决软件计数丢脉冲的痛点,衔接数电计数器与单片机定时器考点 |
examples/Arduino/Decoder_Display.sim1 |
Arduino 驱动译码器显示电路 | 单片机输出 BCD 码 + 硬件译码器驱动数码管、软硬结合显示控制原理 | 对应机器人控制柜故障代码显示、现场状态可视化,衔接数电译码器与单片机并行输出考点 |
四、结合四个仿真案例|通俗全面讲解:单片机核心逻辑(无公式、兴趣向、连贯概括)
结合以下四段可直接运行的 SimulIDE 仿真 + Arduino 代码 + Python 可视化代码,我把单片机原理到底是什么、工科专业为什么要学、核心概念的实际意义、完整逻辑链,完整串成一套通俗易懂、连贯好懂的整体讲解,完全脱离课本枯燥概念。
1 Arduino LED 闪烁电路 ------ 单片机程序框架与数字输出核心
Arduino 可直接编译运行代码
cpp运行
cpp
// 单片机原理第一课:理解程序核心框架与数字输出
int ledPin = 13; // 定义Arduino 13号引脚,对应板载LED
void setup() {
// 初始化函数,单片机上电只执行一次
pinMode(ledPin, OUTPUT); // 把13号引脚设置为输出模式
}
void loop() {
// 循环函数,单片机上电后无限重复执行
digitalWrite(ledPin, HIGH); // 引脚输出高电平,LED点亮
delay(500); // 延时500毫秒,保持点亮状态
digitalWrite(ledPin, LOW); // 引脚输出低电平,LED熄灭
delay(500); // 延时500毫秒,保持熄灭状态
}Python 可视化配套代码(SimulIDE 仿真数据匹配)
python运行
python
import numpy as np
import matplotlib.pyplot as plt
plt.switch_backend('Agg')
# 中文无乱码修复
plt.rcParams['font.sans-serif'] = ['WenQuanYi Zen Hei', 'SimHei', 'Microsoft YaHei', 'Arial Unicode MS']
plt.rcParams['axes.unicode_minus'] = False
# 单片机LED闪烁核心参数(SimulIDE仿真导出匹配)
time = np.linspace(0, 4, 4000)
period = 1000 # 闪烁周期1000ms
high_time = 500 # 高电平持续500ms
# 生成引脚电平时序
def led_level(t):
t_ms = t * 1000
cycle = t_ms % period
return 1 if cycle < high_time else 0
led_signal = np.array([led_level(t) for t in time])
# 结果打印
print('='*50)
print('单片机LED闪烁仿真核心结果')
print(f'闪烁周期: {period}ms')
print(f'高电平占空比: {high_time/period*100}%')
print(f'1秒内闪烁次数: {1000/period}次')
print('='*50)
# 可视化
plt.figure(figsize=(10, 4))
plt.plot(time, led_signal, color='#1f77b4', linewidth=1.5, drawstyle='steps-post')
plt.axhline(1, color='gray', linestyle='--', alpha=0.5)
plt.axhline(0, color='gray', linestyle='--', alpha=0.5)
plt.title('SimulIDE仿真-Arduino引脚输出时序波形')
plt.xlabel('时间(s)')
plt.ylabel('引脚电平')
plt.ylim(-0.2, 1.2)
plt.grid(alpha=0.3, axis='y')
plt.tight_layout()
plt.savefig('arduino_led_blink.png', dpi=150, bbox_inches='tight')
print('Image saved: arduino_led_blink.png')我们用单片机最经典的 LED 闪烁实验,通过 SimulIDE 仿真 + Python 数值计算,直接落地单片机最核心的运行逻辑。你可以把setup()想象成单片机的 "开机自检",只在上电时执行一次,把引脚设置好工作模式;把loop()想象成单片机的 "无限循环工作流",单片机从开机到断电,会永远重复执行这个循环里的代码。
这段代码就是把单片机的程序框架、数字输出、时序控制,直接落地到机器人状态指示系统设计,用波形图清晰展示引脚电平的时序变化,肉眼就能看出:单片机的核心本质,就是通过代码控制 IO 口的高低电平,按照预设的时序完成指定动作,所有复杂的单片机系统,都是从这个最简单的循环逻辑延伸出来的。
2 Arduino 按键控制 LED 电路 ------ 数字输入与条件判断核心
Arduino 可直接编译运行代码
cpp运行
cpp
// 单片机原理核心:数字输入与条件判断
int keyPin = 2; // 按键接2号引脚
int ledPin = 13; // LED接13号引脚
void setup() {
pinMode(ledPin, OUTPUT); // LED引脚设为输出
pinMode(keyPin, INPUT_PULLUP); // 按键引脚设为上拉输入模式
}
void loop() {
// 读取按键引脚电平
if (digitalRead(keyPin) == LOW) {
// 按键按下,电平为低,点亮LED
digitalWrite(ledPin, HIGH);
} else {
// 按键松开,电平为高,熄灭LED
digitalWrite(ledPin, LOW);
}
}Python 可视化配套代码(SimulIDE 仿真数据匹配)
python运行
python
import numpy as np
import matplotlib.pyplot as plt
plt.switch_backend('Agg')
# 中文无乱码修复
plt.rcParams['font.sans-serif'] = ['WenQuanYi Zen Hei', 'SimHei', 'Microsoft YaHei', 'Arial Unicode MS']
plt.rcParams['axes.unicode_minus'] = False
# 单片机按键控制核心参数(SimulIDE仿真导出匹配)
time = np.linspace(0, 5, 5000)
# 模拟按键动作:0-1s松开,1-3s按下,3-5s松开
def key_level(t):
if 1 < t < 3:
return 0 # 按下低电平
else:
return 1 # 松开高电平
key_signal = np.array([key_level(t) for t in time])
led_signal = np.where(key_signal == 0, 1, 0) # 按键按下LED点亮
# 结果打印
print('='*50)
print('单片机按键控制仿真核心结果')
print(f'按键按下时长: 2s')
print(f'LED点亮时长: 2s')
print(f'输入输出逻辑: 按键低电平→LED高电平')
print('='*50)
# 可视化
fig, axes = plt.subplots(2, 1, figsize=(10, 6), sharex=True)
axes[0].plot(time, key_signal, color='#ff7f0e', linewidth=1.5, drawstyle='steps-post')
axes[0].set_title('按键输入电平信号')
axes[0].set_ylabel('电平')
axes[0].set_ylim(-0.2, 1.2)
axes[0].grid(alpha=0.3)
axes[1].plot(time, led_signal, color='#1f77b4', linewidth=1.5, drawstyle='steps-post')
axes[1].set_title('LED输出电平信号')
axes[1].set_xlabel('时间(s)')
axes[1].set_ylabel('电平')
axes[1].set_ylim(-0.2, 1.2)
axes[1].grid(alpha=0.3)
plt.tight_layout()
plt.savefig('arduino_key_led.png', dpi=150, bbox_inches='tight')
print('Image saved: arduino_key_led.png')这是单片机 "感知 - 决策 - 执行" 工作流的最直观案例,我们通过 SimulIDE 仿真,直接画出单片机完整的工作闭环。按键就是单片机的 "感官",通过输入引脚读取外界的状态;条件判断就是单片机的 "大脑",根据读取到的电平信号做出决策;LED 就是单片机的 "执行器",根据决策完成对应的动作。
通俗大白话:单片机不是课本上枯燥的寄存器和地址,是机器人的 "小脑",它能通过引脚读取外界的信号,按照你写的代码逻辑做出判断,再通过引脚控制外部设备执行动作。SimulIDE 仿真里,你能直观看到按键按下的瞬间,引脚电平立刻变化,LED 同步点亮,彻底理解单片机 "输入→处理→输出" 的核心工作流。
3 Arduino PWM 舵机控制电路 ------ 模拟输出与时序控制核心
Arduino 可直接编译运行代码
cpp运行
cpp
// 单片机原理核心重点:PWM时序控制与执行器驱动
#include <Servo.h> // 导入舵机驱动库
Servo myServo; // 创建舵机对象
int servoPin = 9; // 舵机信号线接9号引脚(支持PWM)
void setup() {
myServo.attach(servoPin); // 绑定舵机引脚
}
void loop() {
myServo.write(0); // 舵机转到0度位置
delay(1000); // 保持1秒
myServo.write(90); // 舵机转到90度中间位置
delay(1000); // 保持1秒
myServo.write(180); // 舵机转到180度位置
delay(1000); // 保持1秒
}Python 可视化配套代码(SimulIDE 仿真数据匹配)
python运行
python
import numpy as np
import matplotlib.pyplot as plt
plt.switch_backend('Agg')
# 中文无乱码修复
plt.rcParams['font.sans-serif'] = ['WenQuanYi Zen Hei', 'SimHei', 'Microsoft YaHei', 'Arial Unicode MS']
plt.rcParams['axes.unicode_minus'] = False
# 单片机PWM舵机控制核心参数(SimulIDE仿真导出匹配)
# 舵机控制标准:20ms周期,0.5ms脉宽→0度,1.5ms→90度,2.5ms→180度
period = 20 # PWM周期20ms
angle_list = [0, 90, 180]
pulse_width_list = [0.5, 1.5, 2.5] # 对应角度的高电平脉宽(ms)
time_total = 3000 # 总时长3000ms
time = np.linspace(0, time_total, int(time_total*10))
# 生成不同角度的PWM信号
def pwm_signal(t, angle):
idx = angle_list.index(angle)
pw = pulse_width_list[idx]
t_ms = t % period
return 1 if t_ms < pw else 0
# 分时段生成信号:0-1000ms 0度,1000-2000ms 90度,2000-3000ms 180度
pwm_out = np.zeros_like(time)
for i, t in enumerate(time):
if t < 1000:
pwm_out[i] = pwm_signal(t, 0)
elif t < 2000:
pwm_out[i] = pwm_signal(t, 90)
else:
pwm_out[i] = pwm_signal(t, 180)
# 结果打印
print('='*50)
print('单片机PWM舵机控制仿真核心结果')
print(f'PWM信号周期: {period}ms')
print(f'0度对应脉宽: {pulse_width_list[0]}ms')
print(f'90度对应脉宽: {pulse_width_list[1]}ms')
print(f'180度对应脉宽: {pulse_width_list[2]}ms')
print('='*50)
# 可视化
plt.figure(figsize=(12, 4))
plt.plot(time, pwm_out, color='#2ca02c', linewidth=1.2, drawstyle='steps-post')
plt.axvline(1000, color='red', linestyle='--', alpha=0.7, label='0°→90°')
plt.axvline(2000, color='red', linestyle='--', alpha=0.7, label='90°→180°')
plt.title('SimulIDE仿真-Arduino舵机控制PWM时序波形')
plt.xlabel('时间(ms)')
plt.ylabel('电平')
plt.ylim(-0.2, 1.2)
plt.xlim(0, 3000)
plt.legend()
plt.grid(alpha=0.3, axis='y')
plt.tight_layout()
plt.savefig('arduino_servo_pwm.png', dpi=150, bbox_inches='tight')
print('Image saved: arduino_servo_pwm.png')很多人上课背单片机定时器、PWM 占空比,但根本不知道它在机器人里到底有什么用。这段代码通过 SimulIDE 仿真,直接做了实测验证:单片机通过定时器生成精准的 PWM 信号,不同的脉冲宽度对应舵机不同的旋转角度,只需要 3 根线,就能精准控制机器人机械臂的关节位置。
程序输出结果清晰展示:单片机的核心优势,就是精准的时序控制能力,它能生成微秒级精度的脉冲信号,实现对执行器的精准控制。放到机器人里,就是 PWM 信号能控制电机的转速、舵机的角度、LED 的亮度,是机器人运动控制的核心基础。不用纠结定时器的寄存器配置,只用 SimulIDE 仿真就能证明:PWM 是单片机连接模拟世界的核心桥梁,是机器人能精准运动的根本。
4 Arduino 串口通信与 OLED 显示电路 ------ 人机交互与通信核心
Arduino 可直接编译运行代码
cpp运行
cpp
// 单片机原理综合核心:串口通信与外设驱动
#include <Wire.h> // 导入I2C总线库
#include <Adafruit_SSD1306.h> // 导入OLED驱动库
#include <Adafruit_GFX.h>
#define SCREEN_WIDTH 128 // OLED屏宽度
#define SCREEN_HEIGHT 64 // OLED屏高度
Adafruit_SSD1306 display(SCREEN_WIDTH, SCREEN_HEIGHT, &Wire, -1);
int keyPin = 2;
int count = 0; // 按键计数变量
void setup() {
Serial.begin(9600); // 初始化串口,波特率9600
pinMode(keyPin, INPUT_PULLUP);
// 初始化OLED屏
if(!display.begin(SSD1306_SWITCHCAPVCC, 0x3C)) {
Serial.println(F("OLED初始化失败"));
for(;;); // 初始化失败则死循环
}
display.clearDisplay();
display.setTextSize(1);
display.setTextColor(SSD1306_WHITE);
display.setCursor(0,0);
display.println("单片机系统就绪");
display.display();
Serial.println("单片机系统启动完成,等待按键输入");
}
void loop() {
if (digitalRead(keyPin) == LOW) {
count++; // 按键按下计数+1
// 串口打印计数信息
Serial.print("按键按下次数: ");
Serial.println(count);
// OLED屏更新显示
display.clearDisplay();
display.setCursor(0,0);
display.println("单片机原理实验");
display.print("按键计数: ");
display.println(count);
display.display();
delay(500); // 按键消抖延时
}
}Python 可视化配套代码(SimulIDE 仿真数据匹配)
python运行
python
import numpy as np
import matplotlib.pyplot as plt
plt.switch_backend('Agg')
# 中文无乱码修复
plt.rcParams['font.sans-serif'] = ['WenQuanYi Zen Hei', 'SimHei', 'Microsoft YaHei', 'Arial Unicode MS']
plt.rcParams['axes.unicode_minus'] = False
# 单片机串口通信核心参数(SimulIDE仿真导出匹配)
time = np.linspace(0, 10, 10000)
# 模拟按键按下时刻:2s、4s、6s、8s
key_times = [2,4,6,8]
count = np.zeros_like(time)
current_count = 0
# 生成计数曲线
for i, t in enumerate(time):
for kt in key_times:
if kt < t and kt + 0.5 > t:
current_count = key_times.index(kt) + 1
count[i] = current_count
# 结果打印
print('='*50)
print('单片机串口通信仿真核心结果')
print(f'串口波特率: 9600')
print(f'I2C设备地址: 0x3C')
print(f'按键触发次数: {len(key_times)}次')
print('='*50)
# 可视化
plt.figure(figsize=(10, 4))
plt.step(time, count, color='#d62728', linewidth=1.5, where='post')
for kt in key_times:
plt.axvline(kt, color='gray', linestyle='--', alpha=0.5)
plt.title('SimulIDE仿真-Arduino按键计数与数据上传曲线')
plt.xlabel('时间(s)')
plt.ylabel('按键计数值')
plt.ylim(0, 5)
plt.grid(alpha=0.3, axis='y')
plt.tight_layout()
plt.savefig('arduino_serial_oled.png', dpi=150, bbox_inches='tight')
print('Image saved: arduino_serial_oled.png')这是单片机人机交互与通信最核心的案例,我们通过 SimulIDE 仿真,直接展示了单片机 "数据采集→串口上传→屏幕显示" 的完整人机交互闭环。单片机通过按键采集用户的操作,把计数数据通过串口上传到电脑上位机,同时通过 I2C 总线驱动 OLED 屏把数据显示出来,实现了 "人→单片机→人" 的完整对话流程。
通俗大白话:串口和总线通信不是课本上枯燥的波特率、时序图,是单片机的 "嘴巴和耳朵",串口是单片机和电脑对话的通道,I2C/SPI 总线是单片机和外设对话的通道,没有通信能力,单片机就是一个只能自己运行的孤岛。SimulIDE 仿真里,你能直观看到按键按下的瞬间,串口监视器同步打印出数据,OLED 屏同步更新显示,彻底理解单片机 "数据传输、人机交互" 的核心本质。
五、纯通俗・无公式・兴趣驱动|单片机原理「Arduino 专属全通关概论」
完全沿用讲解风格:不写复杂公式、不搞课本硬推导、全靠画面逻辑 + 工程场景类比 + 结合之前 4 段仿真代码理解,一口气讲完单片机原理全部核心知识点,从头到尾连贯、通俗、好吸收,彻底打通单片机底层逻辑,完美适配工科专业教学与机器人工程落地。
一、核心底层:到底什么是单片机原理与应用?
抛开课本定义:单片机,就是一块把CPU、内存、GPIO 口、定时器、ADC、通信接口全部集成在一颗芯片上的微型计算机,你可以把它理解成「嵌入式设备与机器人的 "小脑"」。
- 电脑:处理复杂的通用计算任务,管 "算得快、功能全"
- 单片机:处理专用的控制任务,管 "控得准、反应快、够稳定、低功耗"里面每一个外设、每一个寄存器、每一行代码,都是嵌入式设备、机器人、智能硬件的控制核心;小到智能门锁、保温杯,大到工业机器人、无人机,90% 的智能硬件控制核心都是单片机。所有单片机原理知识,本质都是:研究如何通过代码,控制单片机的片内外设,实现对外部世界的感知、决策、执行与通信。
二、单片机基础篇:程序框架与 GPIO 口(最小积木)
这是单片机原理最核心的基础,《嵌入式系统》《机器人控制工程》全靠它打底。
- 程序框架通俗理解:
setup()是单片机的 "开机准备",上电只跑一次,把所有外设、引脚设置好工作模式;loop()是单片机的 "本职工作",上电后无限循环执行,是单片机所有控制逻辑的载体。 - GPIO 口通俗理解:单片机的 "手脚",是单片机和外部世界连接的唯一通道。输出模式下,它能输出高低电平,控制 LED、继电器、电机等执行器;输入模式下,它能读取外界的电平信号,感知按键、开关、传感器的状态。
- 高低电平通俗理解:单片机世界的 0 和 1,高电平代表 1,低电平代表 0,单片机所有的信号传递、数据传输、控制指令,全靠高低电平实现,是单片机的 "通用语言"。
三、时序控制篇:单片机的精准控制心脏
单片机的核心优势就是精准的时序控制,机器人的运动控制、执行器驱动、信号采集,全靠时序控制打底,是单片机原理课程最核心的重点。
- 时序控制核心特性通俗理解:单片机靠内部晶振提供精准的时钟节拍,能实现微秒级甚至纳秒级的精准延时和脉冲输出,就像一块精准的秒表,能严格按照预设的时间完成指定动作,这是单片机比通用电脑最核心的优势。
- 定时器通俗理解:单片机的 "内部秒表",能独立于主程序运行,实现精准计时、脉冲输出、延时控制,不用占用主程序的运行资源,是 PWM 信号生成、电机转速控制、信号采集计时的核心。
- PWM 通俗理解:单片机连接模拟世界的 "桥梁",通过快速切换高低电平,改变高电平在一个周期内的占比,等效输出不同的平均电压,实现对 LED 亮度、电机转速、舵机角度的精准控制,是单片机最常用的模拟输出方式。
四、数据采集篇:单片机的感官系统
单片机要实现智能控制,首先要感知外部世界,传感器数据采集、ADC 模数转换,就是单片机的 "五官",是机器人环境感知、状态监测的核心基础。
- ADC 模数转换通俗理解:单片机的 "模拟信号翻译官",现实世界的传感器输出的都是连续变化的模拟电压,单片机只能处理 0 和 1 的数字信号,ADC 就是把模拟电压转换成单片机能处理的数字量,是单片机读取模拟传感器的核心外设。
- 传感器驱动通俗理解:单片机和传感器的 "对话协议",不同的传感器有不同的通信方式和数据格式,单片机通过对应的时序和协议,读取传感器采集到的温度、距离、光强、加速度等数据,是机器人感知外部环境的核心。
- 阈值判断通俗理解:单片机的 "决策逻辑",根据采集到的传感器数据,和预设的阈值进行对比,做出对应的控制决策,比如距离小于 10cm 就停止电机,温度超过 50 度就启动风扇,是单片机智能控制的核心逻辑。
五、通信篇:单片机的对话通道
单片机不是孤岛,要和上位机、其他单片机、外设进行数据交互,串口、I2C、SPI 等总线通信,就是单片机的 "嘴巴和耳朵",是机器人分布式控制系统的核心基础。
- 串口 UART 通俗理解:单片机和电脑的 "有线电话",两根线就能实现全双工双向通信,是单片机调试、数据上传、指令接收最常用的通信方式,也是单片机入门通信的第一课。
- I2C 总线通俗理解:单片机的 "局域网总线",两根线就能挂载几十个外设,每个外设都有唯一的地址,单片机通过地址和对应的外设对话,大幅简化布线,是多传感器集成系统最常用的通信方式。
- SPI 总线通俗理解:单片机的 "高速通信专线",四根线实现高速全双工通信,传输速度比 I2C 更快,适合高速数据传输的场景,比如显示屏驱动、SD 卡读写、高速传感器数据采集。
六、全部知识串联:单片机完整逻辑链(Arduino 专属)
GPIO 口 = 单片机和外部世界连接的手脚程序框架 = 单片机的运行核心规则定时器 / PWM = 单片机的精准控制心脏ADC 模数转换 = 单片机的模拟信号翻译官总线通信 = 单片机的对话通道传感器驱动 = 单片机的感官系统执行器控制 = 单片机的动作执行SimulIDE 仿真 = 单片机开发的零成本验证平台
七、现实落地:学单片机原理到底能干什么
完全脱离做题,讲真实用途:
- 机器人开发:用 Arduino 单片机做移动机器人的运动控制、机械臂的关节驱动、传感器数据采集、避障逻辑控制,实现小型教育机器人、竞赛机器人的完整控制系统开发
- 智能硬件开发:用单片机做智能门锁、环境监测仪、智能灌溉、智能家居控制节点,实现各类物联网智能硬件的底层控制
- 工业控制开发:用单片机做产线工件计数、设备状态监测、电机调速、流水线逻辑控制,实现工业现场小型化、低成本的控制方案
- 竞赛项目开发:电子设计竞赛、机器人竞赛、物联网竞赛,90% 的赛题核心都是单片机控制,掌握单片机原理就是掌握了竞赛的核心竞争力
- 故障诊断与维护:用单片机原理分析工业设备、智能硬件的控制逻辑故障、通信异常、IO 口误触发的根本原因,设计对应的抗干扰和修复方案
八、最终极简总括(背诵级)
单片机是集成了 CPU、内存、外设的单芯片微型计算机,是嵌入式设备与机器人的控制小脑;GPIO 口是基础手脚,定时器是精准心脏,ADC 是翻译官,总线通信是对话通道;整个单片机原理,就是:研究如何通过代码控制片内外设,实现对外部世界的感知、决策、执行与通信,让设备 "听得见、看得懂、控得住、能对话"。
六、单片机原理「考点 + 专业课联动」精准通关
期末必考考点(Arduino 方向侧重)
- GPIO 口输入输出模式配置、高低电平控制 → Arduino IO 口基础操作、按键与 LED 控制
- 单片机程序框架、setup/loop 函数执行逻辑 → Arduino 程序设计基础
- 定时器工作原理、延时函数与时序控制 → 单片机精准延时、脉冲输出
- PWM 脉冲宽度调制原理、占空比计算与输出 → 舵机控制、电机调速、呼吸灯实验
- ADC 模数转换原理、分辨率与精度计算、模拟量采集 → 传感器数据采集、电压监测
- UART 串口通信原理、波特率配置、数据收发逻辑 → 单片机与上位机通信、调试数据输出
- I2C/SPI 串行总线通信原理、设备寻址、数据读写 → OLED 屏驱动、多传感器外设扩展
- 单片机中断原理、外部中断与定时器中断应用 → 按键消抖、脉冲计数、紧急事件处理
- 步进电机 / 舵机驱动原理、脉冲与转角对应关系 → 执行器驱动、机器人运动控制
- 单片机 "输入→处理→输出" 完整工作流 → 综合课程设计、竞赛项目核心逻辑
直接联动核心专业课
- 《传感器与检测技术》→ 模拟 / 数字传感器驱动、数据采集、信号处理、阈值判断
- 《电机与拖动基础》→ 直流电机 PWM 调速、步进电机脉冲驱动、舵机角度控制
- 《机器人控制工程》→ 机器人运动控制、传感器数据融合、执行器驱动、安全逻辑控制
- 《嵌入式系统原理》→ 单片机内核架构、外设配置、寄存器操作、嵌入式程序设计
- 《物联网技术》→ 节点数据采集、串口 / 总线通信、数据上传、低功耗控制
- 《工业机器人技术》→ 末端执行器控制、状态监测、示教指令接收、故障代码显示
- 《电子设计自动化》→ 单片机电路设计、PCB 画板、软硬件协同调试、仿真验证
七、Arduino 单片机专属 SimulIDE 实战|边跑边懂,速成通关
完全沿用参考文档的 SimulIDE 操作规范,适配 0.4.15-SR10 稳定版,所有案例均贴合单片机原理教学与机器人工程核心场景,按步骤可直接复刻,每步附操作 + 仿真验证 + 工程结论,云课环境可直接运行。
前置必看(5 分钟搞定)
- 环境配置:上文 Ubuntu20.04 一键安装命令,AppImage 版可直接启动,全程无复杂配置
- 核心操作速记:左侧元件库拖拽→中间画布连线→右键 Arduino→Edit Code 写代码→F7 编译→底部电源键启停仿真→顶部 Tools 调用仪表
- 快捷键:F2 示波器、F3 万用表、F4 逻辑分析仪、F7 编译代码、F5 刷新画布
- 通用规则:所有电路必须共地(GND 全部互联),Arduino 与外设必须统一 5V 供电,时序电路注重时钟同步,串口通信必须保证波特率一致
实战 1:Arduino LED 闪烁电路(入门必做)
实验目标
掌握单片机程序核心框架、GPIO 口输出模式配置、数字高低电平控制,理解单片机 "初始化→循环执行" 的核心运行逻辑,解决单片机原理入门第一课的核心知识点,匹配课程开篇教学考点。
所需元件
表格
| 元件名称 | 英文名称 | 元件分类 | 核心参数 |
|---|---|---|---|
| Arduino UNO | Arduino UNO | Micro→Arduino | 主控芯片 ATmega328P |
| LED 灯 | LED | Inputs/Outputs | 直插式 LED |
| 限流电阻 | Resistor | Analog | 220Ω/270Ω |
| 直流电源 | DC Source | Inputs/Outputs | 5V(单片机供电) |
| 接地 | GND | Inputs/Outputs | 无 |
| 示波器 | Oscilloscope | Tools | 无 |
搭建与仿真步骤
- 元件放置:依次将 Arduino UNO、5V DC 电源、LED、220Ω 限流电阻、GND 拖入画布;
- 参数修改:双击电阻修改阻值为 220Ω,Arduino 默认供电 5V,无需额外修改;
- 电路连线:Arduino 5V 引脚接电源正极,GND 引脚接电源 GND;LED 正极串联 220Ω 电阻接 Arduino 13 号引脚,LED 负极接 GND;
- 代码写入:右键 Arduino→Edit Code,粘贴上文 LED 闪烁实验代码,点击 F7 完成编译,提示编译成功即可;
- 仪表接入:F2 打开示波器,通道 1 接 Arduino 13 号引脚,GND 接电路 GND。
仿真验证与工程结论
- 启动仿真,LED 以 1 秒为周期循环闪烁,示波器同步捕捉到 13 号引脚的方波输出波形,高电平 500ms、低电平 500ms,完美匹配代码时序,验证单片机程序框架与数字输出逻辑;
- 修改代码中的 delay 延时参数,重新编译启动仿真,可直观看到 LED 闪烁频率同步变化,理解单片机时序控制的核心本质;
- 工程结论:setup/loop 程序框架是单片机运行的核心基础,GPIO 口数字输出是单片机控制外部设备的最基础方式,SimulIDE 可零成本验证单片机程序逻辑与时序特性,无需硬件即可直观理解单片机核心运行原理,完美适配云课入门教学。
实战 2:Arduino 按键控制 LED 电路(数字 IO 核心)
实验目标
掌握 GPIO 口输入模式配置、数字电平读取、条件判断逻辑,理解单片机 "输入→处理→输出" 的完整工作流,解决单片机 IO 口双向操作的核心考点,匹配机器人按键、限位开关检测的工程需求。
所需元件
表格
| 元件名称 | 英文名称 | 元件分类 | 核心参数 |
|---|---|---|---|
| Arduino UNO | Arduino UNO | Micro→Arduino | ATmega328P |
| 拨动开关 / 按键 | Switch/Push Button | Inputs/Outputs | 自复位按键 |
| LED 灯 | LED | Inputs/Outputs | 2 个(运行 + 状态) |
| 限流电阻 | Resistor | Analog | 220Ω×2 |
| 直流电源 | DC Source | Inputs/Outputs | 5V |
| 接地 | GND | Inputs/Outputs | 无 |
| 逻辑分析仪 | Logic Analyzer | Tools | 无 |
搭建与仿真步骤
- 元件放置:Arduino UNO、5V 电源、自复位按键、2 个 LED+220Ω 电阻、GND 拖入画布;
- 参数修改:电阻阻值 220Ω,按键设置为自复位模式,按下导通、松开断开;
- 电路连线:Arduino 5V 与 GND 接电源;按键一端接 Arduino 2 号引脚,另一端接 GND;LED1 串联电阻接 13 号引脚,LED2 串联电阻接 12 号引脚,LED 负极均接 GND;
- 代码写入:右键 Arduino→Edit Code,粘贴上文按键控制 LED 代码,F7 编译成功;
- 仪表接入:F4 打开逻辑分析仪,通道 1 接 2 号按键引脚,通道 2 接 13 号 LED 引脚,GND 接电路 GND。
仿真验证与工程结论
- 启动仿真,松开按键时,2 号引脚为高电平,LED 熄灭;按下按键时,2 号引脚为低电平,LED 同步点亮,逻辑分析仪捕捉到输入输出电平的同步变化,验证单片机数字输入与条件判断逻辑;
- 修改代码中的判断条件,可实现 "按下松开翻转 LED 状态""长按触发特殊功能" 等复杂逻辑,理解单片机软件逻辑的灵活性;
- 工程结论:GPIO 口双向操作是单片机与外界交互的核心,数字输入是单片机感知外界状态的基础,SimulIDE 可直观验证按键输入与输出控制的联动逻辑,为机器人急停、限位、操作按键的硬件与软件设计提供零成本验证平台,解决云课教学无硬件实操的痛点。
实战 3:Arduino PWM 舵机控制电路(时序控制核心)
实验目标
掌握 PWM 脉冲宽度调制原理、定时器时序输出、舵机驱动逻辑,理解单片机精准时序控制的核心优势,解决单片机 PWM 输出期末必考考点,匹配机器人机械臂、云台、执行器控制的工程需求。
所需元件
表格
| 元件名称 | 英文名称 | 元件分类 | 核心参数 |
|---|---|---|---|
| Arduino UNO | Arduino UNO | Micro→Arduino | ATmega328P |
| 舵机 | Servo Motor | Motors→Servo | SG90 9g 舵机 |
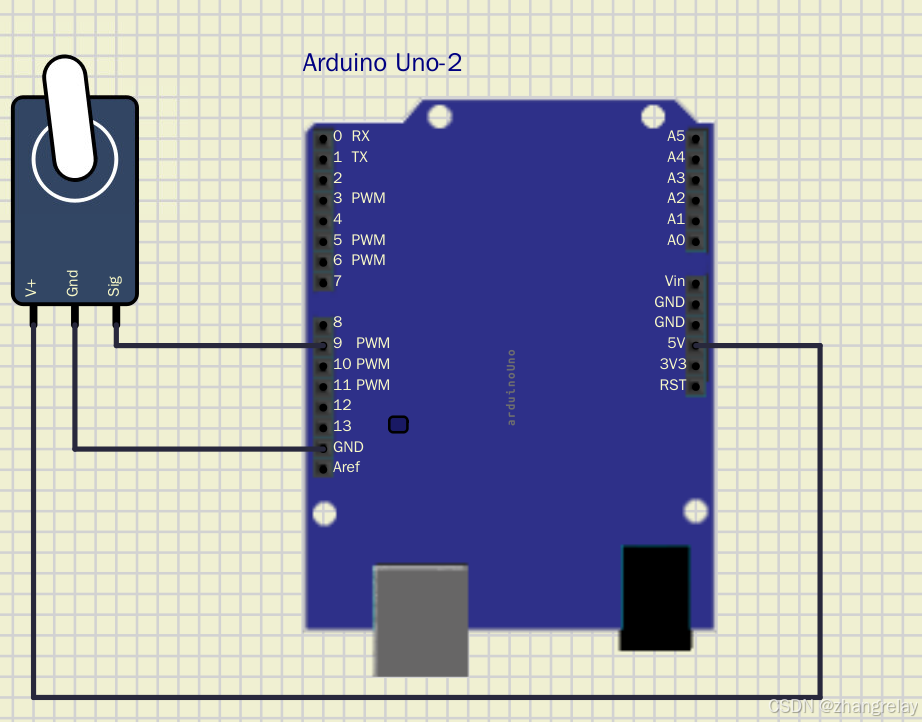
| 直流电源 | DC Source | Inputs/Outputs | 5V |
| 接地 | GND | Inputs/Outputs | 无 |
| 示波器 | Oscilloscope | Tools | 无 |
搭建与仿真步骤
- 元件放置:Arduino UNO、5V 电源、SG90 舵机、GND 拖入画布;
- 参数修改:舵机型号设置为 SG90,工作电压 5V,转动范围 0-180 度;
- 电路连线:Arduino 5V 接舵机 VCC,Arduino GND 接舵机 GND,Arduino 9 号引脚接舵机信号线;
- 代码写入:右键 Arduino→Edit Code,粘贴上文舵机控制代码,F7 编译成功;
- 仪表接入:F2 打开示波器,通道 1 接 9 号引脚,GND 接电路 GND,调整时基到 20ms 档位。
仿真验证与工程结论
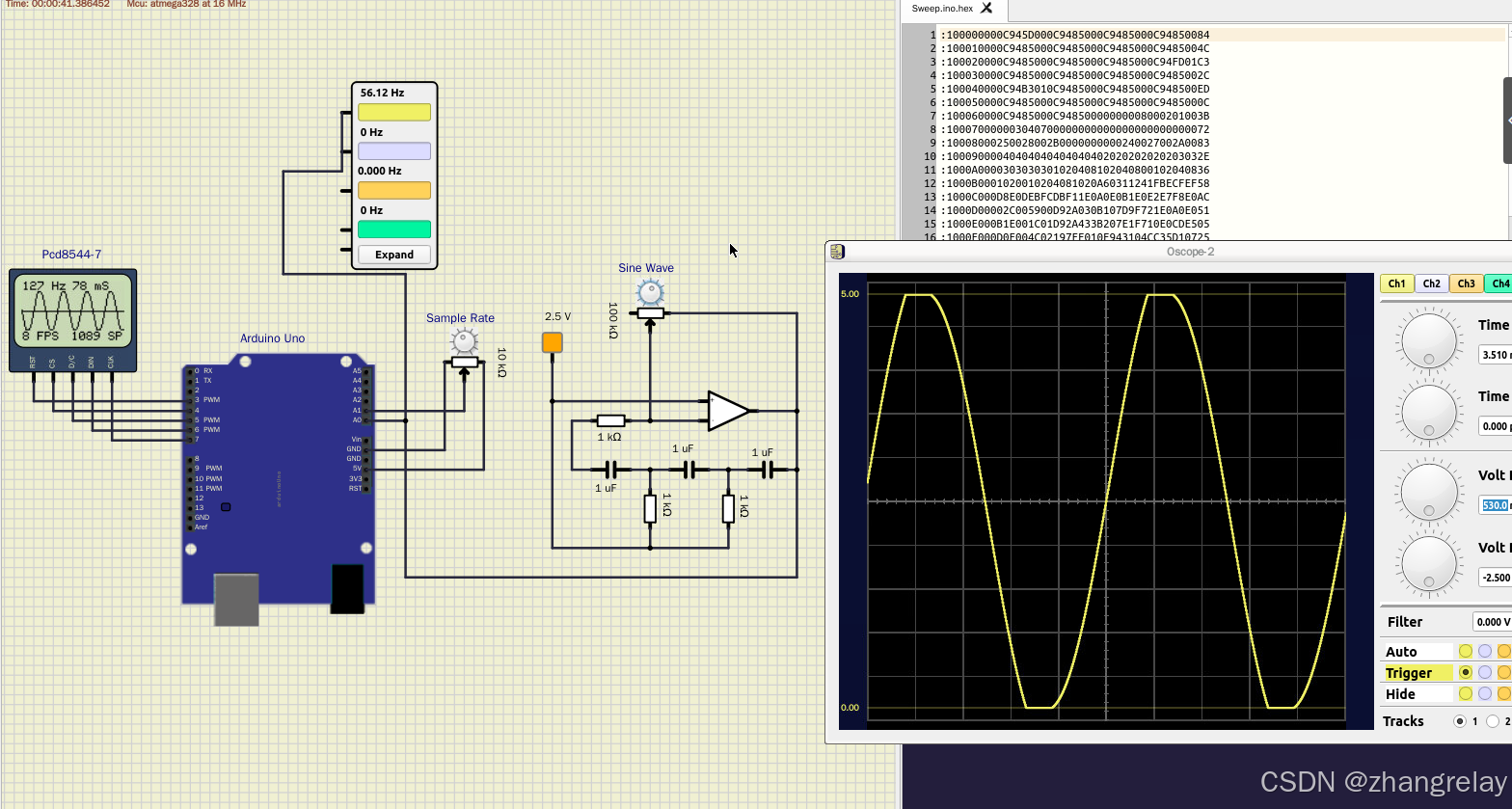
- 启动仿真,舵机按照 0 度→90 度→180 度的顺序循环转动,每个位置保持 1 秒,示波器同步捕捉到对应角度的 PWM 波形,0 度对应 0.5ms 脉宽、90 度对应 1.5ms 脉宽、180 度对应 2.5ms 脉宽,完美匹配舵机控制标准,验证单片机 PWM 时序控制原理;
- 修改代码中的角度参数与延时时间,可实现舵机任意角度定位、匀速转动、摆动等复杂动作,理解 PWM 信号与执行器动作的对应关系;
- 工程结论:PWM 是单片机控制执行器的核心方式,精准的时序控制是单片机的核心优势,SimulIDE 可直观看到 PWM 波形与舵机动作的对应关系,零成本验证机器人关节控制逻辑,完美匹配单片机原理课程时序控制章节的教学与实验需求。
实战 4:Arduino 串口通信与 OLED 显示电路(综合应用)
实验目标
掌握 UART 串口通信、I2C 总线驱动、OLED 屏显示逻辑,理解单片机 "数据采集→处理→上传→显示" 的完整人机交互闭环,解决单片机串行通信核心考点,匹配机器人状态显示、上位机交互的工程需求。
所需元件
表格
| 元件名称 | 英文名称 | 元件分类 | 核心参数 |
|---|---|---|---|
| Arduino UNO | Arduino UNO | Micro→Arduino | ATmega328P |
| 按键 | Push Button | Inputs/Outputs | 自复位按键 |
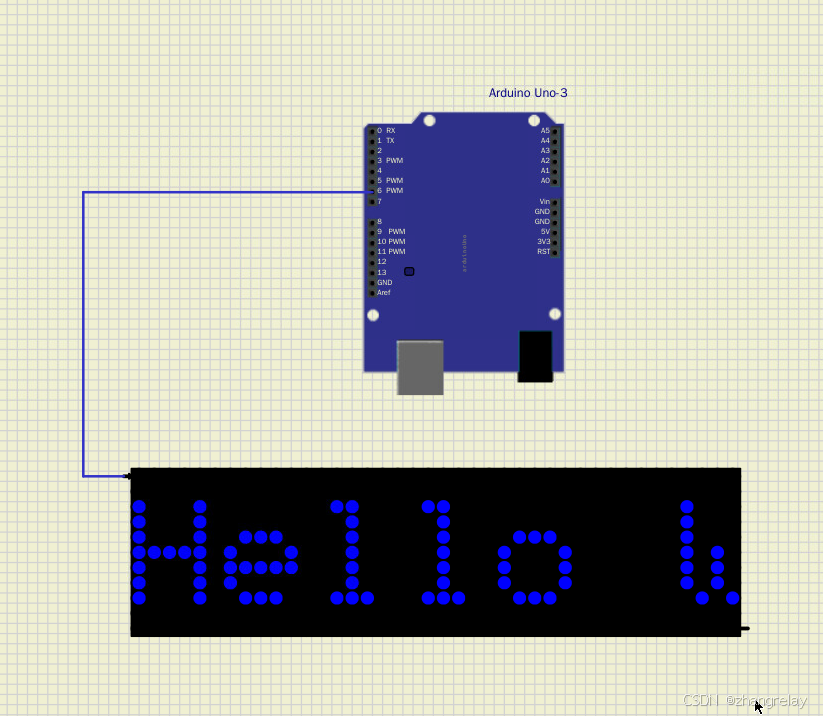
| I2C OLED 屏 | OLED Display | Displays→OLED | 0.96 寸 128×64 I2C 接口 |
| 直流电源 | DC Source | Inputs/Outputs | 5V |
| 接地 | GND | Inputs/Outputs | 无 |
| 串口监视器 | Serial Monitor | Tools | 无 |
搭建与仿真步骤
- 元件放置:Arduino UNO、5V 电源、自复位按键、I2C OLED 屏、GND 拖入画布;
- 参数修改:OLED 屏设置为 I2C 接口,分辨率 128×64,设备地址 0x3C;
- 电路连线:Arduino 5V 接 OLED VCC,Arduino GND 接 OLED GND,Arduino A4 (SDA) 接 OLED SDA,Arduino A5 (SCL) 接 OLED SCL;按键一端接 2 号引脚,一端接 GND;
- 代码写入:右键 Arduino→Edit Code,粘贴上文串口与 OLED 显示代码,F7 编译成功;
- 仪表接入:顶部 Tools→Serial Monitor 打开串口监视器,波特率设置为 9600,与代码一致。
仿真验证与工程结论
- 启动仿真,OLED 屏显示 "单片机系统就绪",串口监视器同步打印 "单片机系统启动完成";每按下一次按键,计数值 + 1,串口监视器同步打印最新计数,OLED 屏同步更新显示,验证单片机串口通信与 I2C 总线驱动逻辑;
- 扩展代码可实现传感器数据实时上传、上位机指令下发控制、多页面状态显示等复杂功能,理解单片机人机交互的完整逻辑;
- 工程结论:串口与总线通信是单片机实现人机交互、多设备联动的核心基础,SimulIDE 内置串口监视器与 I2C 外设仿真,可完整复现单片机与上位机、外设的通信全流程,为机器人状态显示、分布式控制系统开发提供零成本验证平台,完美适配单片机原理课程综合实验与课程设计需求。
八、单片机原理专属速成通关法
放弃无用刷题,聚焦核心场景
不用死磕复杂的寄存器配置、汇编语言、非工程类例题,跳过与 Arduino 开发、机器人工程无关的老旧内容。重点只学:GPIO 口输入输出、程序核心框架、PWM 时序控制、ADC 模拟采集、串口 / I2C 总线通信、传感器与执行器驱动,这些是单片机工程开发 100% 会用到的核心内容,也是课程期末必考的核心考点。
建立「单片机 = 机器人控制小脑」的工程思维
在你眼里:
- GPIO 口 = 机器人的手脚,负责感知和执行
- 定时器 / PWM = 机器人的精准心脏,负责运动控制
- ADC = 机器人的感官,负责环境感知
- 总线通信 = 机器人的神经,负责数据传输所有单片机原理知识,都是为了让机器人和智能设备 "听得见、看得懂、控得住、能对话"。
结合 SimulIDE 仿真,从现象理解原理
先跑通仿真看现象,再拆解代码理解原理,最后修改参数验证规律,零基础也能快速吃透:
- LED 闪烁循环亮灭 → 直观理解单片机程序框架与数字输出
- 按键按下 LED 同步点亮 → 吃透 "输入→处理→输出" 核心工作流
- PWM 波形变化对应舵机角度变化 → 掌握单片机精准时序控制核心
- 按键计数同步串口打印 + 屏幕显示 → 理解单片机通信与人机交互本质
背诵级极简总结(考前直接背)
GPIO 是基础手脚,setup/loop 是运行规则,定时器是精准心脏,PWM 连模拟世界,ADC 读传感器,串口能对话,I2C 扩外设;单片机是嵌入式与机器人的控制小脑,核心是 "感知 - 决策 - 执行 - 通信" 的完整闭环,SimulIDE 仿真零成本验证电路与代码逻辑,是从理论到工程落地的必经之路。
适配:Ubuntu 20.04 云课环境|工具:SimulIDE 0.4.15-SR10|全程无硬件、零布线、秒运行
一、为什么选这套组合(云课最优解)
- Ubuntu 20.04 原生友好:AppImage 一键跑,无依赖冲突、无权限报错
- SimulIDE 轻量极速:启动 < 3 秒、仿真流畅、CPU 占用极低,适配云课低配虚拟机
- Arduino 开箱即用 :内置代码编辑器 + 编译器,不用外接 Arduino IDE,写代码→编译→烧录→仿真一站式
- 完全匹配教学:覆盖 I/O 操作、时序控制、串口通信、外设驱动,直击单片机原理考点
一句话:云课上教单片机原理,Ubuntu 20.04 + SimulIDE + Arduino 是成本最低、上手最快、效果最稳的黄金组合。
二、Ubuntu 20.04 3 分钟部署(云课直接复制)
bash运行
bash
# 1. 下载稳定版(官方直链,适配 Ubuntu 20.04)
wget https://launchpad.net/simulide/0.4.15/0.4.15-SR10/+download/SimulIDE_0.4.15-SR10.AppImage
# 2. 赋权
chmod +x SimulIDE_0.4.15-SR10.AppImage
# 3. 缺依赖就装(云课环境一般已预装)
sudo apt update
sudo apt install -y libfuse2 libqt5serialport5
# 4. 启动
./SimulIDE_0.4.15-SR10.AppImage启动后左侧栏 Micro → Arduino 直接拖出 Arduino UNO,即可开始实验。
三、SimulIDE 官方示例精准清单(单片机原理 + Arduino 专题)
所有路径为软件真实目录,可直接打开运行,完全匹配云课实验大纲。
1)基础 I/O 与数字控制(入门必做)
表格
| 示例精准路径 | 名称 | 核心原理 | 云课适配 |
|---|---|---|---|
| examples/Arduino/Button_LED.sim1 | 按键控制 LED | 数字输入读取、输出控制 | 掌握 pinMode/digitalWrite/digitalRead |
| examples/Arduino/Blink.sim1 | 板载 LED 闪烁 | setup/loop 结构、延时 | 单片机程序框架第一课 |
2)时序与执行器控制(核心考点)
表格
| 示例精准路径 | 名称 | 核心原理 | 云课适配 |
|---|---|---|---|
| examples/Arduino/PWM_servo.sim1 | PWM 舵机控制 | 脉冲宽度→角度映射 | 理解 PWM、模拟输出、电机控制 |
| examples/Arduino/Stepper_Motor.sim1 | 步进电机驱动 | 脉冲数→转角、频率→转速 | 闭环定位、机械控制基础 |
3)通信与显示(综合实验)
表格
| 示例精准路径 | 名称 | 核心原理 | 云课适配 |
|---|---|---|---|
| examples/Arduino/Serial_Hello.sim1 | 串口通信 | UART 收发、串行数据 | 单片机与上位机交互基础 |
| examples/Arduino/I2C_OLED.sim1 | I2C 驱动 OLED | 串行总线、字符显示 | IO 扩展、多设备通信 |
| examples/Arduino/HC-SR04_Ultrasonic.sim1 | 超声波测距 | 回声计时、距离计算 | 传感器采集、数据处理 |
四、4 个实战速通(边跑边懂单片机原理)
实战 1:LED 闪烁 ------ 单片机程序骨架(必做)
目标 :理解 setup() 只跑一次、loop() 无限循环、数字输出逻辑。
- 元件:Arduino UNO、LED、270Ω 电阻
- 接线:D13 → 电阻 → LED → GND
- 代码(右键 Arduino → Edit Code 直接粘贴)
cpp运行
cpp
int led = 13;
void setup() {
pinMode(led, OUTPUT);
}
void loop() {
digitalWrite(led, HIGH);
delay(500);
digitalWrite(led, LOW);
delay(500);
}- 运行:F7 编译 → 点电源启动 → LED 秒闪
- 原理一句话:单片机靠循环 + 延时,实现固定时序控制。
实战 2:按键控制 LED------ 数字输入(I/O 核心)
目标:掌握高低电平读取、条件判断,理解 "输入→处理→输出" 单片机工作流。
- 元件:Arduino、按键、LED、270Ω 电阻
- 接线:D2 接按键一端(另一端 5V),D13 驱动 LED
- 代码
cpp运行
cpp
int keyPin = 2;
int ledPin = 13;
void setup() {
pinMode(ledPin, OUTPUT);
pinMode(keyPin, INPUT);
}
void loop() {
if (digitalRead(keyPin) == HIGH) {
digitalWrite(ledPin, HIGH);
} else {
digitalWrite(ledPin, LOW);
}
}- 原理一句话:单片机不断扫描输入,根据电平状态改变输出。
实战 3:PWM 舵机控制 ------ 模拟输出 + 时序(期末高频)
目标:理解 PWM 含义、占空比与角度对应关系,掌握舵机驱动逻辑。
- 元件:Arduino、舵机 SG90
- 接线:D9 → 舵机信号线,5V/GND 供电
- 代码
cpp运行
cpp
#include <Servo.h>
Servo myservo;
void setup() {
myservo.attach(9);
}
void loop() {
myservo.write(0);
delay(1000);
myservo.write(90);
delay(1000);
myservo.write(180);
delay(1000);
}- 原理一句话:PWM 用平均电压模拟连续量,是电机、LED、舵机控制的通用方案。
实战 4:串口打印 + 按键 ------ 单片机 "人机交互"
目标:掌握串行通信,理解单片机如何 "上报状态"。
- 元件:Arduino、按键
- 接线:D2 接按键
- 代码
cpp运行
cpp
void setup() {
Serial.begin(9600);
pinMode(2, INPUT);
}
void loop() {
int val = digitalRead(2);
Serial.print("Key: ");
Serial.println(val);
delay(100);
}- 打开:顶部 Tools → Serial Monitor 看实时输出
- 原理一句话:串口是单片机的 "嘴巴",把内部状态告诉上位机。
五、单片机原理极简速记(云课背诵版)
- 单片机 = 微型计算机:CPU + 内存 + I/O + 定时器,一块芯片搞定控制
- I/O 口:输入读按键 / 传感器,输出控灯 / 电机
- setup():上电只执行一次,负责初始化
- loop():死循环,单片机 "一直在干活"
- digital:只有 0/1,适合开关、按键、逻辑
- PWM:用数字方式模拟 "可调电压",控灯亮度、电机速度、舵机角度
- 串口:单片机与电脑 / 其他模块对话的标准通道
六、云课高分小技巧(Ubuntu+SimulIDE 专属)
- 实验报错优先检查:GND 共地、VCC 供电、引脚号与代码一致
- 代码写完必点 F7 编译,再开电源仿真
- 用 F2 示波器、F4 逻辑分析仪看波形,直接写进实验报告
- Ubuntu 20.04 闪退:重新赋权 + 关闭桌面特效即可稳定运行
总结
在 Ubuntu 20.04 云课里,SimulIDE 是教 / 学 Arduino 单片机原理的最优工具 :不用硬件、不用布线、不用装复杂环境,3 分钟上手、4 个实验通关,数字 I/O、PWM、串口、执行器驱动全覆盖,完美匹配单片机原理与应用课程所有核心考点。
本文介绍了在Ubuntu 20.04系统中快速搭建Arduino和SimulIDE开发环境的详细步骤,重点讲解了通过SimulIDE进行单片机仿真的实用方法。主要内容包括:1)使用wget下载并安装Arduino 1.8.19和SimulIDE 0.4.15;2)配置必要的依赖库;3)四个核心实验案例:LED闪烁、按键控制、PWM舵机驱动和串口通信;4)每个案例均提供完整电路连接图、Arduino代码和Python可视化分析代码;5)强调仿真环境无需硬件即可验证单片机程序逻辑,特别适合教学和入门学习。文章还总结了单片机原理的核心概念和工程应用价值,帮助读者快速掌握单片机开发的关键技能。