摘要
无人机高速飞行时,运动模糊严重劣化视觉 SLAM 的特征提取和物体重建质量。Skoltech 的 SharpSLAM 将 DeblurGANv2 作为前端去模糊模块接入 DSP-SLAM(Deep Shape Priors SLAM)流水线,在不改变 SLAM 后端的前提下,将 3D 物体重建 F-score 从 82.9% 提升至 86.2%,SDF RMSE 从 17.2cm 降至 15.4cm。本文解析其三层系统架构、形状先验优化目标函数以及尺度标定方案。
一、问题背景:运动模糊------无人机视觉 SLAM 的阿喀琉斯之踵
视觉 SLAM 系统(如 ORB-SLAM2/3)依赖清晰的图像纹理提取稳定特征点。但在无人机场景下,两个因素让这个前提频繁失效:
- 高速机动:无人机急转、加速时相机产生不可预测的运动模糊,ORB 特征点提取数量骤降,导致跟踪丢失
- 光照变化:室外飞行时光照剧烈变化,叠加模糊进一步恶化图像质量
现有工作如 DarkSLAM 针对低光照场景用 GAN 增强图像,但针对运动模糊+物体级 3D 重建的联合方案仍是空白。SharpSLAM 的切入点就是这个 gap:在 SLAM 前端加一层去模糊,看它能多大程度改善下游的物体重建精度。
二、核心方法
2.1 整体架构:三层流水线
SharpSLAM 的设计思路很直接------不魔改 SLAM 后端,而是在输入端"洗干净"图像:
- 去模糊层:DeblurGANv2 对每帧 RGB 图像做运动去模糊
- SLAM 层:ORB-SLAM2 在去模糊图像上提取特征、建图、定位
- 物体重建层:DSP-SLAM 利用 SLAM 点云和物体分割结果,用深度形状先验做 3D 物体重建
三层之间是单向数据流:去模糊图像 → SLAM 特征点+位姿 → 物体级 3D 网格。物体重建结果反过来作为约束加入 SLAM 位姿图优化,形成闭环。
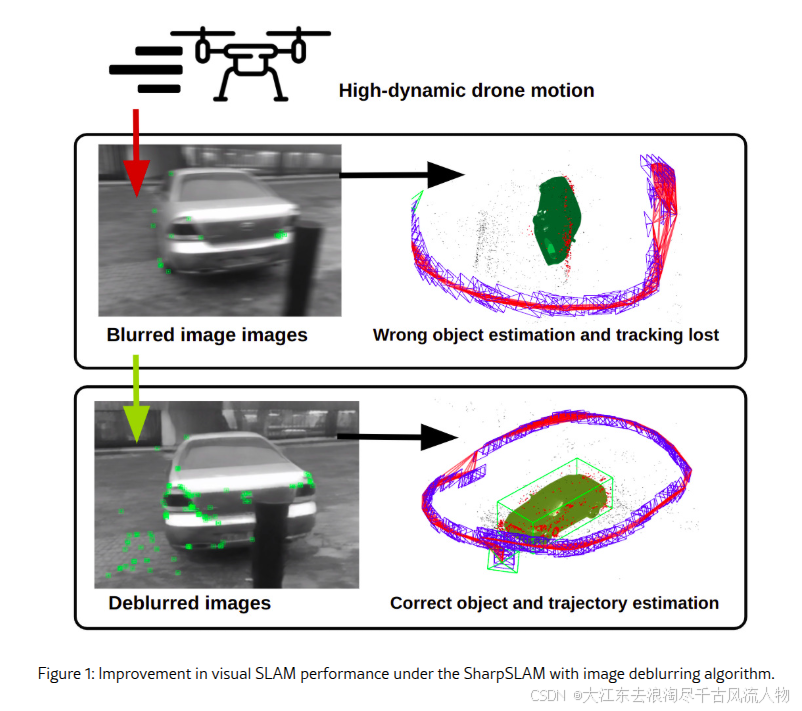
图 1:SharpSLAM 三层流水线架构。上半部分展示高层数据流(去模糊→SLAM→物体重建),下半部分展开各模块内部的数据交互,重点关注物体位姿对 Pose Graph 的反馈约束(黄色虚线)。重绘自 design skill
2.2 DeblurGANv2 去模糊前端
去模糊模块采用 DeblurGANv2,基于 Feature Pyramid Network(FPN) 架构,骨干网络使用 Inception-ResNet-v2(精度优先)或 MobileNet(速度优先)。
FPN 的核心价值在于多尺度特征融合:运动模糊在不同尺度上表现不同(大尺度的整体偏移 vs 小尺度的纹理涂抹),FPN 从多个分辨率层级提取特征并融合,比单尺度去模糊更鲁棒。
GAN 训练采用对抗损失 + 感知损失的标准范式,判别器引导生成器产出视觉逼真且纹理清晰的去模糊结果。
2.3 DSP-SLAM 物体重建与形状先验优化
DSP-SLAM 的核心思想是:不把物体当成自由形态的点云,而是用一个低维形状码 z\mathbf{z}z 参数化物体几何,通过 DeepSDF 神经网络解码器将 z\mathbf{z}z 映射为有向距离函数(Signed Distance Function, SDF)。
优化目标函数:
E=λsEsurf+λrErend+λc∥z∥2 E = \lambda_s E_{surf} + \lambda_r E_{rend} + \lambda_c \|\mathbf{z}\|^2 E=λsEsurf+λrErend+λc∥z∥2
三项分别是:
| 项 | 含义 | 作用 |
|---|---|---|
| EsurfE_{surf}Esurf | 点云-表面一致性 | 让重建表面贴合 SLAM 观测到的 3D 点 |
| ErendE_{rend}Erend | 渲染损失 | 处理部分遮挡------即使只看到物体一面,也能推断完整形状 |
| λc∣z∣2\lambda_c|\mathbf{z}|^2λc∣z∣2 | 形状码正则化 | 防止形状码偏离训练分布,保证重建结果"像一辆车" |
这个设计的精妙之处在于 ∥z∥2\|\mathbf{z}\|^2∥z∥2 正则项:DeepSDF 的隐空间服从近似高斯分布,正则化等价于 MAP 估计的先验项,让形状码在训练集覆盖的流形上优化,避免产出几何上合理但语义上荒谬的重建结果。
物体位姿(位置+朝向)和形状码 z\mathbf{z}z 被联合优化,并作为约束加入 ORB-SLAM2 的位姿图------物体的位置一致性反过来约束相机位姿估计,形成物体-SLAM 双向耦合。
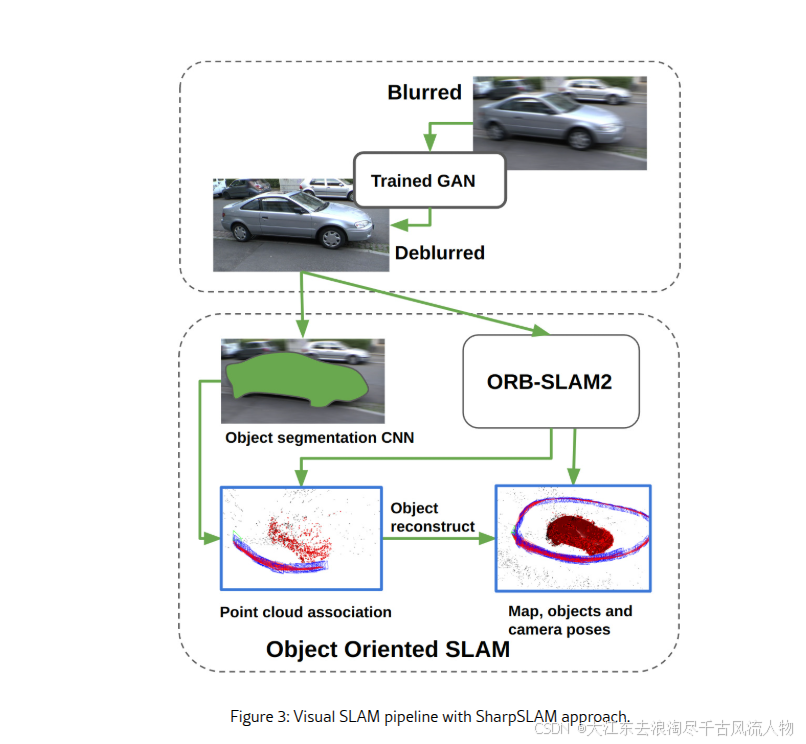
图 2:DSP-SLAM 形状先验优化循环。核心是 Shape Code z 通过 DeepSDF 解码为 SDF,然后在能量函数 E 中联合优化物体位姿和形状。底部指标对比展示去模糊带来的 38.5% 特征点增长。重绘自 design skill
2.4 单目尺度标定
单目 SLAM 输出的位姿和点云缺乏绝对尺度。SharpSLAM 用棋盘格标定板解决这个问题:
s=ρ(P1cb,P2cb)ρ(P1cs,P2cs) s = \frac{\rho(P_1^{cb}, P_2^{cb})}{\rho(P_1^{cs}, P_2^{cs})} s=ρ(P1cs,P2cs)ρ(P1cb,P2cb)
其中 ρ(⋅)\rho(\cdot)ρ(⋅) 是欧氏距离,PcbP^{cb}Pcb 是相机相对棋盘板的真实位置(通过 PnP 求解),PcsP^{cs}Pcs 是 SLAM 坐标系中对应位置。两帧之间的真实距离比上 SLAM 距离,即得缩放因子 sss。
这个方法简单但有效------实际工程中,只需在起飞前让无人机对着棋盘板拍两帧,即可完成标定。
三、工程实现
3.1 硬件平台
| 组件 | 规格 |
|---|---|
| 飞控 | Pixracer R14 |
| 机载计算 | Raspberry Pi 4 (8GB RAM) |
| 相机 | Raspberry Pi Camera v2.1 (8MP Sony IMX219) |
| 处理方式 | 机载录制 → 离线服务器处理 |
数据录制参数:分辨率 1980×1280,帧率 15fps,每次飞行约 3 分钟,飞行轨迹为环绕目标物体的椭圆环形路径。
3.2 关键帧数量对重建质量的影响
论文实验了不同关键帧数下的重建效果:
- 15 帧:过早触发重建,物体仅被部分观测,导致位置和尺寸估计偏差大
- 50 帧:经验最优值,此时无人机已环绕车辆足够角度,多视角信息充分
这个发现有实际指导意义:在无人机巡检场景中,不能急于重建------必须确保目标物体被从足够多视角观测后再触发 3D 重建。
#mermaid-svg-zIHnV99s2DUAF0d3{font-family:"trebuchet ms",verdana,arial,sans-serif;font-size:16px;fill:#333;}@keyframes edge-animation-frame{from{stroke-dashoffset:0;}}@keyframes dash{to{stroke-dashoffset:0;}}#mermaid-svg-zIHnV99s2DUAF0d3 .edge-animation-slow{stroke-dasharray:9,5!important;stroke-dashoffset:900;animation:dash 50s linear infinite;stroke-linecap:round;}#mermaid-svg-zIHnV99s2DUAF0d3 .edge-animation-fast{stroke-dasharray:9,5!important;stroke-dashoffset:900;animation:dash 20s linear infinite;stroke-linecap:round;}#mermaid-svg-zIHnV99s2DUAF0d3 .error-icon{fill:#552222;}#mermaid-svg-zIHnV99s2DUAF0d3 .error-text{fill:#552222;stroke:#552222;}#mermaid-svg-zIHnV99s2DUAF0d3 .edge-thickness-normal{stroke-width:1px;}#mermaid-svg-zIHnV99s2DUAF0d3 .edge-thickness-thick{stroke-width:3.5px;}#mermaid-svg-zIHnV99s2DUAF0d3 .edge-pattern-solid{stroke-dasharray:0;}#mermaid-svg-zIHnV99s2DUAF0d3 .edge-thickness-invisible{stroke-width:0;fill:none;}#mermaid-svg-zIHnV99s2DUAF0d3 .edge-pattern-dashed{stroke-dasharray:3;}#mermaid-svg-zIHnV99s2DUAF0d3 .edge-pattern-dotted{stroke-dasharray:2;}#mermaid-svg-zIHnV99s2DUAF0d3 .marker{fill:#333333;stroke:#333333;}#mermaid-svg-zIHnV99s2DUAF0d3 .marker.cross{stroke:#333333;}#mermaid-svg-zIHnV99s2DUAF0d3 svg{font-family:"trebuchet ms",verdana,arial,sans-serif;font-size:16px;}#mermaid-svg-zIHnV99s2DUAF0d3 p{margin:0;}#mermaid-svg-zIHnV99s2DUAF0d3 .label{font-family:"trebuchet ms",verdana,arial,sans-serif;color:#333;}#mermaid-svg-zIHnV99s2DUAF0d3 .cluster-label text{fill:#333;}#mermaid-svg-zIHnV99s2DUAF0d3 .cluster-label span{color:#333;}#mermaid-svg-zIHnV99s2DUAF0d3 .cluster-label span p{background-color:transparent;}#mermaid-svg-zIHnV99s2DUAF0d3 .label text,#mermaid-svg-zIHnV99s2DUAF0d3 span{fill:#333;color:#333;}#mermaid-svg-zIHnV99s2DUAF0d3 .node rect,#mermaid-svg-zIHnV99s2DUAF0d3 .node circle,#mermaid-svg-zIHnV99s2DUAF0d3 .node ellipse,#mermaid-svg-zIHnV99s2DUAF0d3 .node polygon,#mermaid-svg-zIHnV99s2DUAF0d3 .node path{fill:#ECECFF;stroke:#9370DB;stroke-width:1px;}#mermaid-svg-zIHnV99s2DUAF0d3 .rough-node .label text,#mermaid-svg-zIHnV99s2DUAF0d3 .node .label text,#mermaid-svg-zIHnV99s2DUAF0d3 .image-shape .label,#mermaid-svg-zIHnV99s2DUAF0d3 .icon-shape .label{text-anchor:middle;}#mermaid-svg-zIHnV99s2DUAF0d3 .node .katex path{fill:#000;stroke:#000;stroke-width:1px;}#mermaid-svg-zIHnV99s2DUAF0d3 .rough-node .label,#mermaid-svg-zIHnV99s2DUAF0d3 .node .label,#mermaid-svg-zIHnV99s2DUAF0d3 .image-shape .label,#mermaid-svg-zIHnV99s2DUAF0d3 .icon-shape .label{text-align:center;}#mermaid-svg-zIHnV99s2DUAF0d3 .node.clickable{cursor:pointer;}#mermaid-svg-zIHnV99s2DUAF0d3 .root .anchor path{fill:#333333!important;stroke-width:0;stroke:#333333;}#mermaid-svg-zIHnV99s2DUAF0d3 .arrowheadPath{fill:#333333;}#mermaid-svg-zIHnV99s2DUAF0d3 .edgePath .path{stroke:#333333;stroke-width:2.0px;}#mermaid-svg-zIHnV99s2DUAF0d3 .flowchart-link{stroke:#333333;fill:none;}#mermaid-svg-zIHnV99s2DUAF0d3 .edgeLabel{background-color:rgba(232,232,232, 0.8);text-align:center;}#mermaid-svg-zIHnV99s2DUAF0d3 .edgeLabel p{background-color:rgba(232,232,232, 0.8);}#mermaid-svg-zIHnV99s2DUAF0d3 .edgeLabel rect{opacity:0.5;background-color:rgba(232,232,232, 0.8);fill:rgba(232,232,232, 0.8);}#mermaid-svg-zIHnV99s2DUAF0d3 .labelBkg{background-color:rgba(232, 232, 232, 0.5);}#mermaid-svg-zIHnV99s2DUAF0d3 .cluster rect{fill:#ffffde;stroke:#aaaa33;stroke-width:1px;}#mermaid-svg-zIHnV99s2DUAF0d3 .cluster text{fill:#333;}#mermaid-svg-zIHnV99s2DUAF0d3 .cluster span{color:#333;}#mermaid-svg-zIHnV99s2DUAF0d3 div.mermaidTooltip{position:absolute;text-align:center;max-width:200px;padding:2px;font-family:"trebuchet ms",verdana,arial,sans-serif;font-size:12px;background:hsl(80, 100%, 96.2745098039%);border:1px solid #aaaa33;border-radius:2px;pointer-events:none;z-index:100;}#mermaid-svg-zIHnV99s2DUAF0d3 .flowchartTitleText{text-anchor:middle;font-size:18px;fill:#333;}#mermaid-svg-zIHnV99s2DUAF0d3 rect.text{fill:none;stroke-width:0;}#mermaid-svg-zIHnV99s2DUAF0d3 .icon-shape,#mermaid-svg-zIHnV99s2DUAF0d3 .image-shape{background-color:rgba(232,232,232, 0.8);text-align:center;}#mermaid-svg-zIHnV99s2DUAF0d3 .icon-shape p,#mermaid-svg-zIHnV99s2DUAF0d3 .image-shape p{background-color:rgba(232,232,232, 0.8);padding:2px;}#mermaid-svg-zIHnV99s2DUAF0d3 .icon-shape .label rect,#mermaid-svg-zIHnV99s2DUAF0d3 .image-shape .label rect{opacity:0.5;background-color:rgba(232,232,232, 0.8);fill:rgba(232,232,232, 0.8);}#mermaid-svg-zIHnV99s2DUAF0d3 .label-icon{display:inline-block;height:1em;overflow:visible;vertical-align:-0.125em;}#mermaid-svg-zIHnV99s2DUAF0d3 .node .label-icon path{fill:currentColor;stroke:revert;stroke-width:revert;}#mermaid-svg-zIHnV99s2DUAF0d3 :root{--mermaid-font-family:"trebuchet ms",verdana,arial,sans-serif;} 否
是
物体位姿约束
无人机环绕飞行
录制 RGB 视频
DeblurGANv2
逐帧去模糊
ORB-SLAM2
特征提取+建图
关键帧数 ≥ 50?
DSP-SLAM
物体分割 + 点云关联
DeepSDF 形状优化
E = λₛE_surf + λᵣE_rend + λc||z||²
3D Object Mesh
F-score: 86.2%
四、实验分析
4.1 3D 重建精度对比
在 Kia Soul 车型数据集上,模糊 vs 去模糊的定量对比:
| 指标 | 模糊图像 | 去模糊图像 | 提升 |
|---|---|---|---|
| 精度 (Precision) | 0.971 | 0.987 | +1.6% |
| 召回率 (Recall) | 0.723 | 0.764 | +4.1% |
| F-score | 0.829 | 0.862 | +3.3% |
| 关联点数 | 2337 | 3236 | +38.5% |
| SDF RMSE (m) | 0.172 | 0.154 | -10.5% |
| IoU (%) | 74.51 | 75.67 | +1.2% |
几个关键观察:
- 召回率提升比精度提升大得多 (+4.1% vs +1.6%):去模糊主要帮助恢复了原本丢失的特征点,而非让已有特征更准确。这符合直觉------模糊首先导致的是特征点"消失",而非"漂移"
- 关联点数暴增 38.5% :这是最显著的改善。更多的特征点意味着更密的点云,直接改善了 EsurfE_{surf}Esurf 项的约束质量
- SDF RMSE 下降 10.5%:重建表面的几何误差显著降低,说明点云质量的改善确实传导到了下游重建
4.2 跟踪稳定性
论文指出去模糊后 ORB-SLAM2 的跟踪丢失频率显著降低------模糊帧上特征点数量不足导致的 tracking lost 事件在去模糊后基本消除。这对无人机自主飞行至关重要:跟踪丢失意味着定位失效,可能导致碰撞。
小结
SharpSLAM 的方法论非常工程化:不设计新的 SLAM 算法,而是在输入端加一层 GAN 去模糊,让成熟的 ORB-SLAM2 + DSP-SLAM 流水线在模糊图像上也能正常工作。这种"修复输入而非修改算法"的思路在工程上性价比极高------改动量小、风险低、效果可度量。
三个值得注意的点:
- 召回率 > 精度的提升模式:说明运动模糊的主要危害是让特征"消失"而非"偏移",去模糊的核心价值是恢复丢失信息
- 38.5% 的特征点增长:这个数字说明模糊帧上有超过 1/3 的有效特征被"埋没"了,去模糊把它们挖出来的收益是实质性的
- 形状先验正则化 :∥z∥2\|\mathbf{z}\|^2∥z∥2 项不起眼但关键------它让系统在部分观测下也能给出合理的完整形状估计,本质上是在用训练数据的分布知识补偿观测不足
局限性也很明显:仅在单一车型(Kia Soul)上验证,DeepSDF 的形状先验依赖训练数据的类别覆盖;去模糊+SLAM 全部在离线服务器上跑,距离机载实时还有距离;单目方案需要棋盘格标定尺度,部署便捷性受限。
这篇工作更像一份扎实的工程验证报告,而非方法论突破。但它回答了一个实用的问题:面对模糊图像,你该改 SLAM 算法还是改输入?答案是后者------用 GAN 去模糊这种"外挂"方案,就能获得 10%+ 的重建精度提升。
参考文献:D. Davletshin et al., "SharpSLAM: 3D Object-Oriented Visual SLAM with Deblurring for Agile Drones," arXiv:2410.05405, 2024.