上一节介绍了1D转子的临界转速分析。在1D转子模型中,转子是以集中质量单元的形式建模的。此种建模方法不可避免地会带来一些简化和局部特征的缺失。接下来介绍OptiStruct3D实体转子的建模及临界转速分析实例。
3D实体转子建立详细的转子网格模型,然后将转子部分转换成超单元模型,和定子系统进行装配。在实际建模中可以只对转子转盘部分进行详细网格建模,然后转换成超单元转子的旋转轴仍然可以使用梁单元建模。
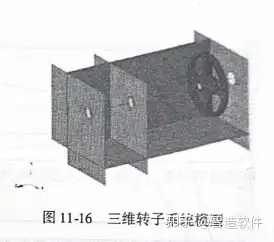
图11-16所示为本例的转子-定子系统的网格模型,转子转盘将使用超单元。转子转盘网格模型为phasel_Rotor_createSE_base.fem,其余网格模型为 phase2_Rotor_Critical_Speed_Abase.fem。求解完成的模型见 phasel_Rotor_create_SE.fem 和phase2_Rotor_Critical _Speed_A. fem。
1.生成超单元
在Optistruct中生成超单元,头文件如图11-17 所示,其中转盘部分共使用了4个界面节点,编号为5~8。使用固定界面模态法生成超单元。为了在后处理中看到转盘的3D轮,模型中包含了PLOTEL单元。图11-18展示的是转子转盘的详细网格。
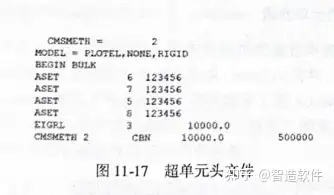
图11-17 超单元头文件
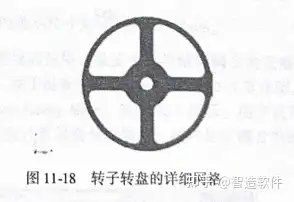
图11-18转子转盘的详细网格
2.装配超单元转子和其他部件
超单元装配完成的头文件如图11-19所示。ASSIGN语句引用超单元,节点5~8自动和超单元中相同编号的节点进行对接。图11-20展示的是超单元转子和定子装配完成后的系统的网格模型。
3.后处理
使用Optistruct求解完成后,在HyperGraph中导人.out 文件进行后处理,使用1X和2X 两个阶次,得到如图11-21所示的坎贝尔图。在 HyperView 中可以看到涡动振型,如图 11-22 所示。
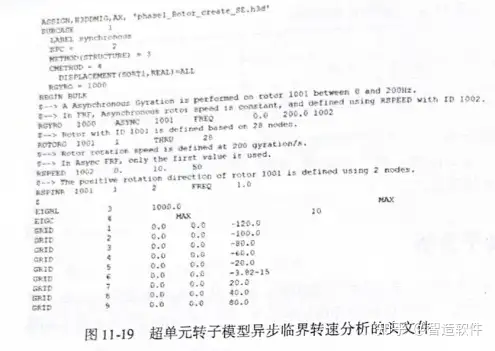
图11-19 超单元转子模型异步临界转速分析的头文件
图11-20 超单元转子和定子装配系统的模型
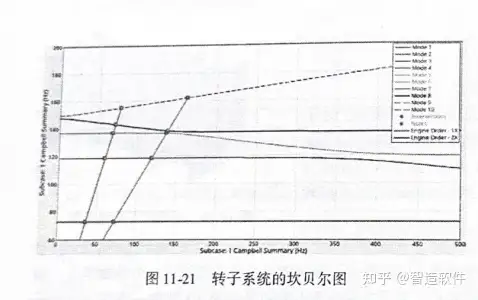
图11-21 转子系统的坎贝尔图
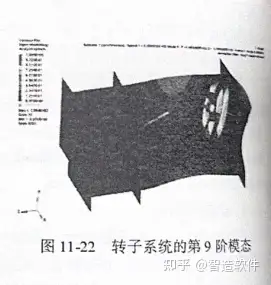
图11-22 转子系统的第9阶模态
本篇内容取自HyperWorks进阶教程系列的《Optistruct结构分析与工程应用》,版权归原作者所有,如有侵犯您的权益,请及时联系我们,我们将立即删除。