在机器视觉与图像处理领域,区域定位与特征提取是许多应用中的核心任务。本文将以一张猴子图像为例,详细介绍如何使用 Halcon 软件实现对其眼睛区域的精准定位与提取。我们将通过一系列图像处理操作,逐步拆解处理流程,帮助大家理解每一步的作用与意义。
一、图像读取与灰度化
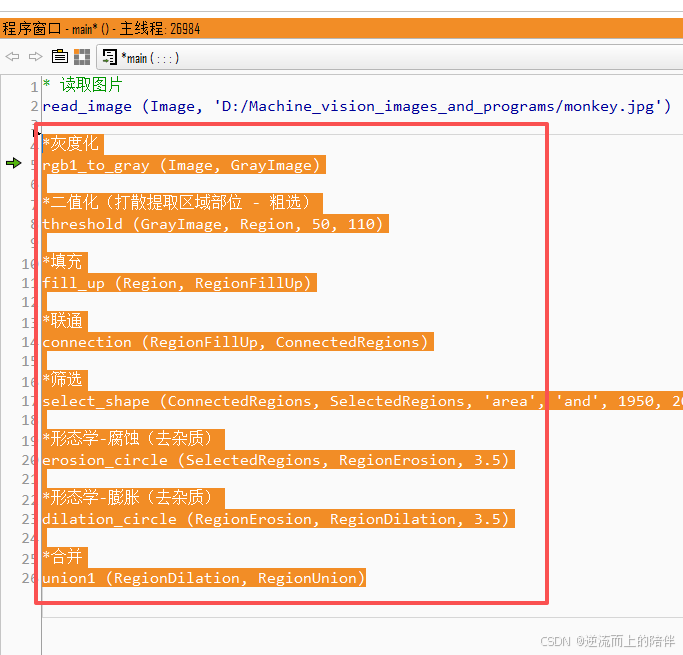
首先,我们读取原始彩色图像,并将其转换为灰度图像。这样做可以减少后续处理的复杂度,同时保留足够的结构信息。
read_image (Image, 'D:/Machine_vision_images_and_programs/monkey.jpg')
rgb1_to_gray (Image, GrayImage)二、阀值分割(二值化与区域粗选)
我们通过设定灰度阈值(50~110)对图像进行二值化,初步提取出可能包含眼睛的区域。这一步是"粗选",目的是将目标区域从背景中分离出来。
threshold (GrayImage, Region, 50, 110)三、区域填充与连通域分析
由于二值化后的区域可能存在空洞,我们使用 fill_up 进行填充,确保区域完整。接着通过 connection 操作将图像中不连续的区域分离为多个连通域,便于后续筛选。
fill_up (Region, RegionFillUp)
connection (RegionFillUp, ConnectedRegions)四、形状筛选
我们根据区域的面积特征进行筛选,只保留面积在 1950~2000 像素之间的区域。这一步能够有效排除不符合条件的干扰区域。
select_shape (ConnectedRegions, SelectedRegions, 'area', 'and', 1950, 2000)五、形态学去噪
为了进一步去除微小噪声或边缘毛刺,我们使用圆形结构元素进行腐蚀与膨胀操作。这一对操作能够平滑区域边界,并去除不规则的细小区域。
erosion_circle (SelectedRegions, RegionErosion, 3.5)
dilation_circle (RegionErosion, RegionDilation, 3.5)六、区域合并
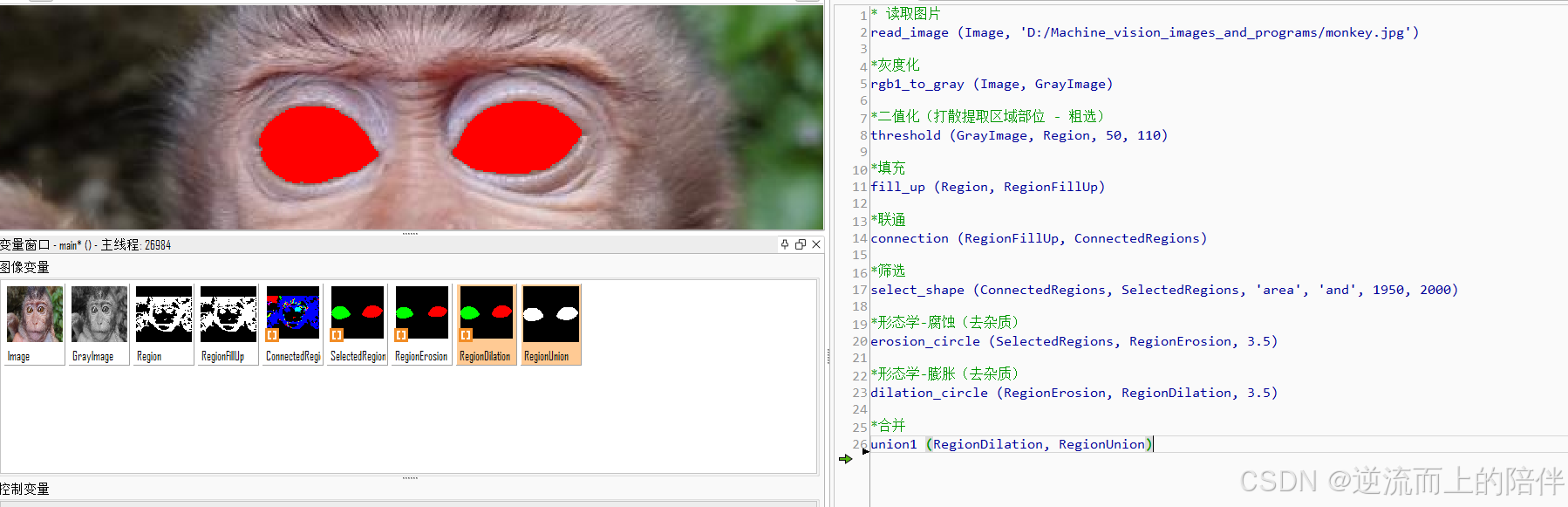
最后,我们将所有处理后的区域合并为一个整体区域,便于后续分析或输出。
union1 (RegionDilation, RegionUnion)本方案通过"灰度化 → 二值化 → 填充 → 连通域分析 → 形状筛选 → 形态学去噪 → 区域合并"这一完整流程,实现了对猴子眼睛区域的精准提取。该方法具有较强的可扩展性,适用于其他类似场景中的区域定位任务。
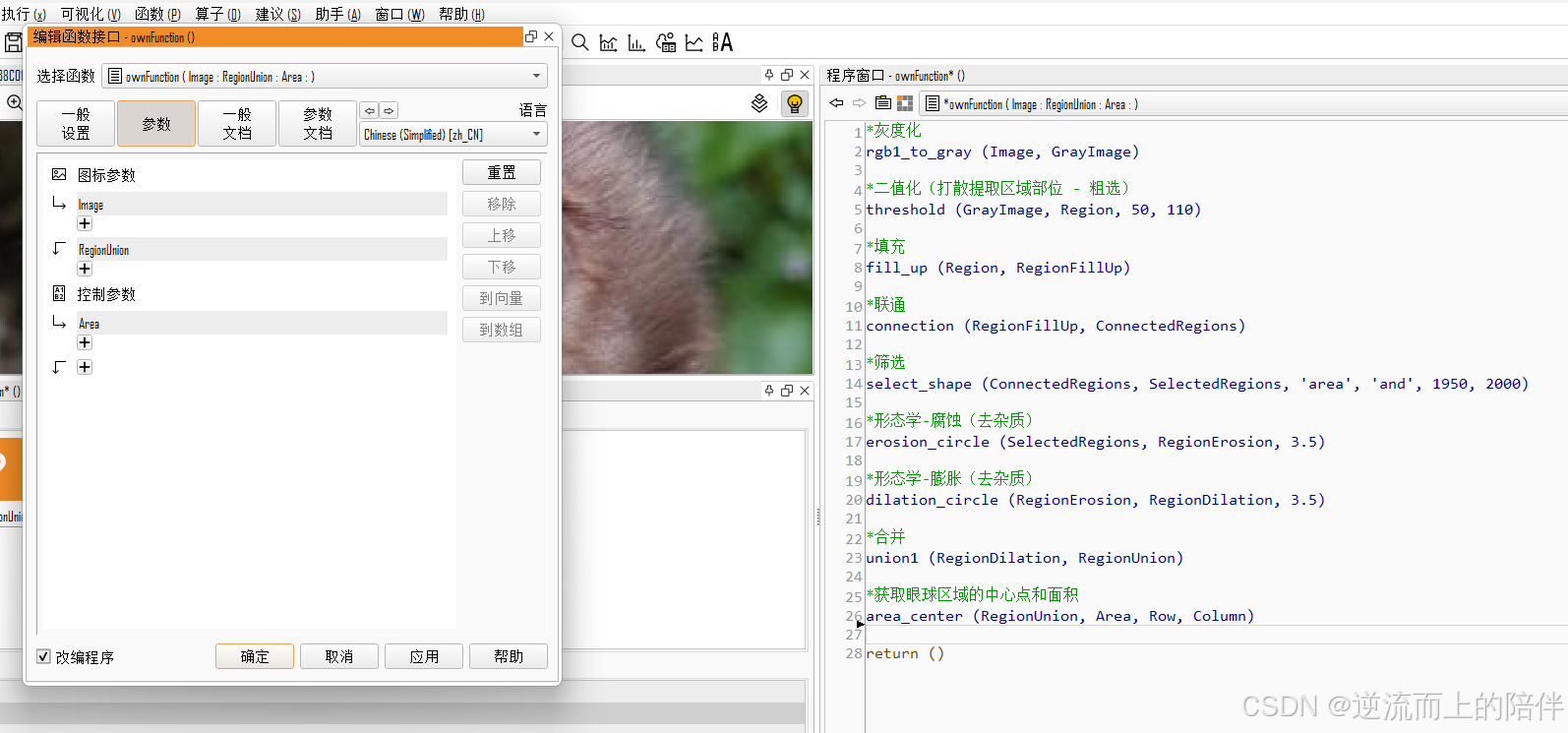
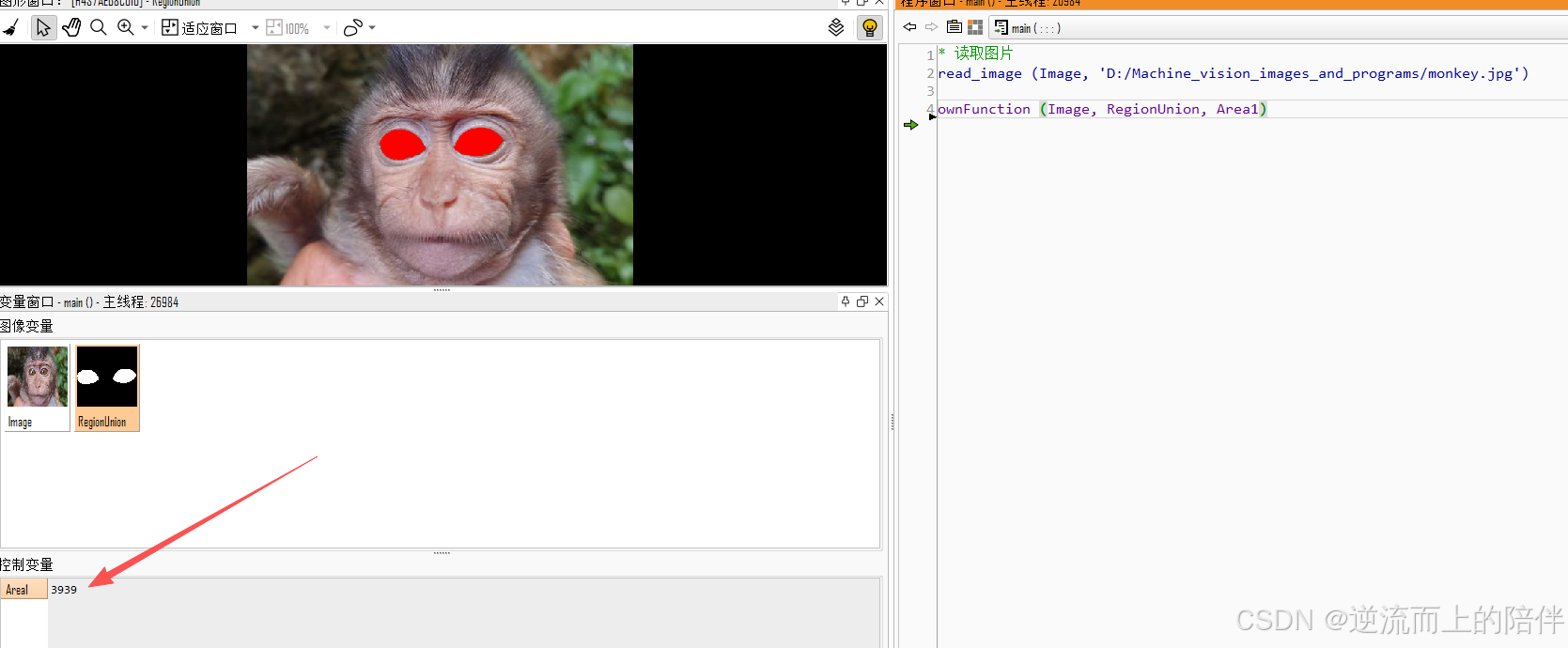
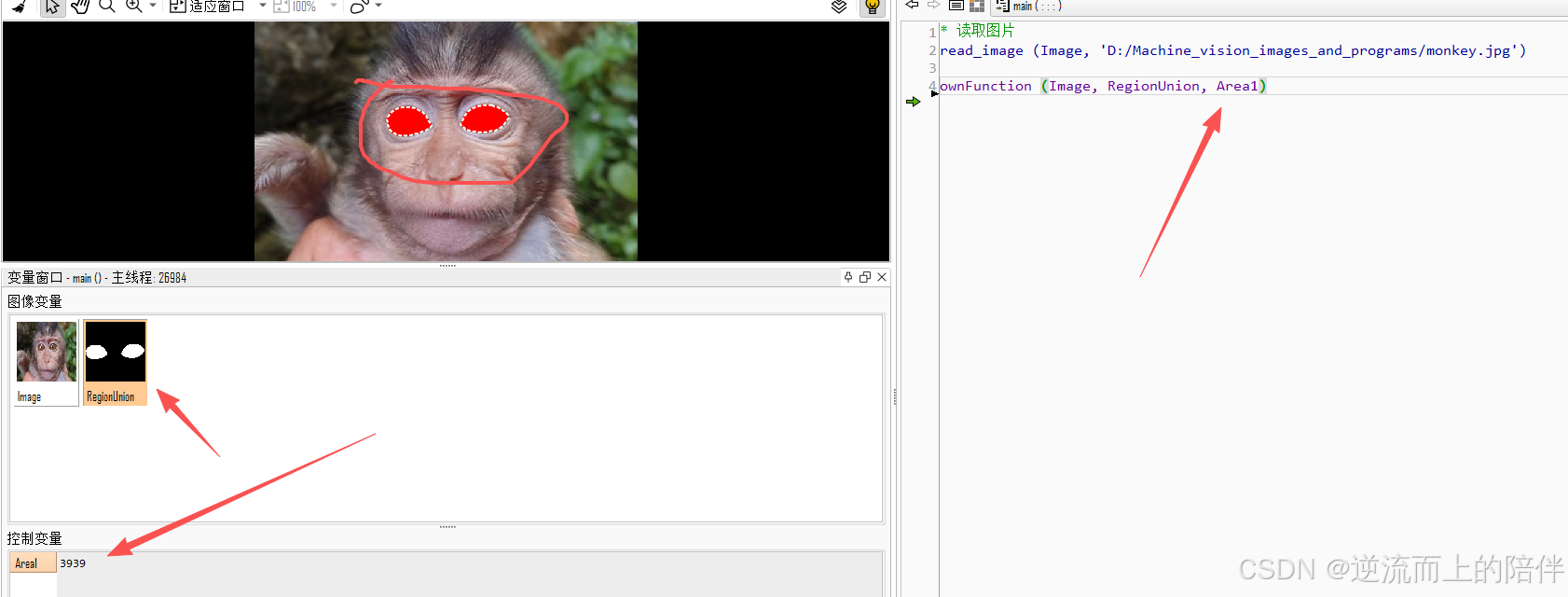
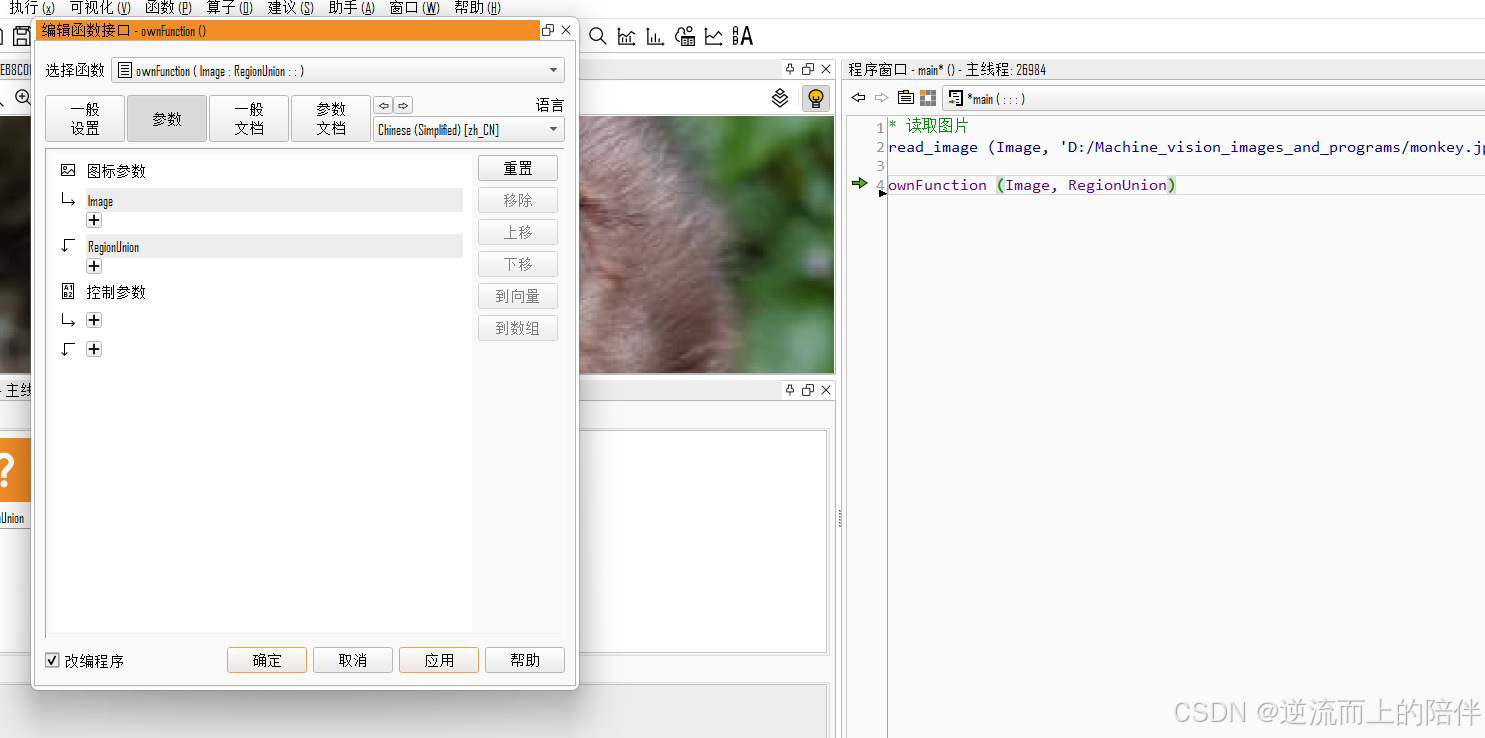
以下创建封装函数:
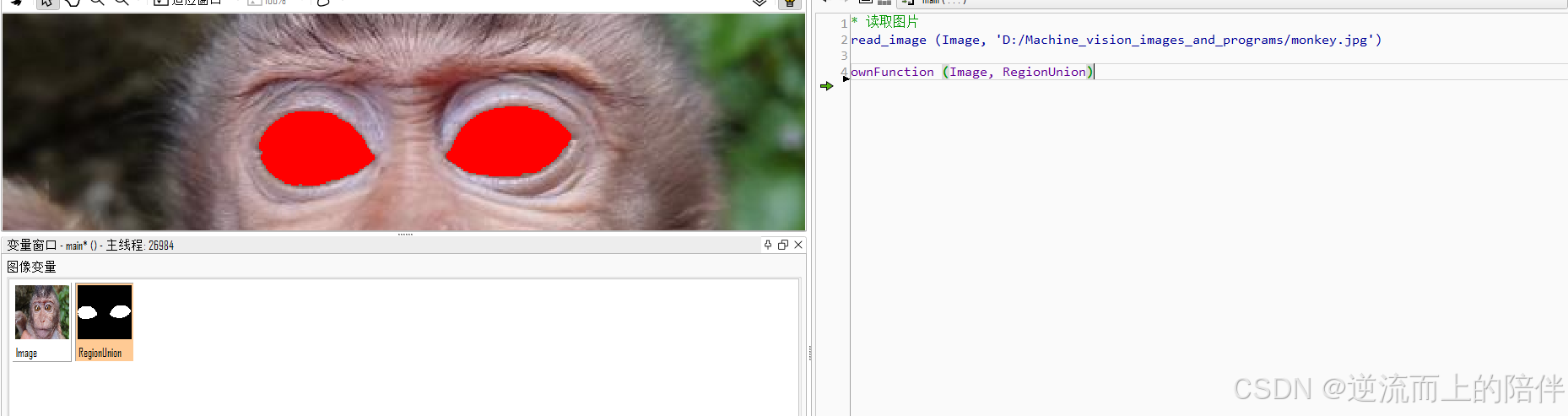
以下是在封装函数内求猴子眼睛的面积: