一、环境准备
ubuntu22.04(x64)、ROS2环境(ROS2安装)、官方仓库(Livox_SDK2包)
二、Livox_SDK2编译
1、环境依赖
Ubuntu ≥ 20.04
CMake ≥ 3.0.0
gcc ≥ 4.8.1
2、安装 CMake
执行以下命令安装 CMake:
sudo apt install cmake
3、编译与安装 Livox-SDK2
克隆 Livox-SDK2 源码仓库:
git clone https://github.com/Livox-SDK/Livox-SDK2.git
进入源码目录并创建构建文件夹:
cd Livox-SDK2
mkdir build
cd build
编译并安装:
cmake ..
make -j
sudo make install
提示:如果此处make -j一直卡着不动或者报错,可能是gcc版本的问题,直接中断执行make即可编译成功。
4、安装结果说明
安装完成后,文件会被放置到以下目录中:
| 类型 | 路径 |
|---|---|
| 动态库与静态库 | /usr/local/lib |
| 头文件 | /usr/local/include |
5、卸载 Livox-SDK2
如需卸载 Livox SDK2,可执行以下命令:
sudo rm -rf /usr/local/lib/liblivox_lidar_sdk_*
sudo rm -rf /usr/local/include/livox_lidar_*
若在 cmake 或 make 阶段出现权限或依赖问题,请尝试执行 sudo apt update 并重新安装 build-essential:
sudo apt install build-essential
三、Livox-SDK2 使用指南 | 示例运行与配置说明
1、Livox SDK2 自带了以下三个示例程序:
| 示例名 | 功能说明 |
|---|---|
| livox_lidar_quick_start | 快速连接并接收 Livox 雷达数据 |
| logger | 启用雷达日志功能并保存日志数据 |
| multi_lidars_upgrade | 对多个雷达进行固件升级 |
2、livox_lidar_quick_start 示例
(1)虚拟机需要修改设置两处
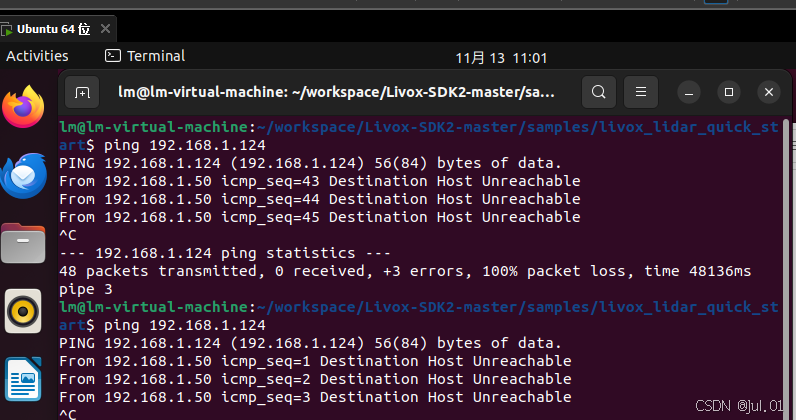
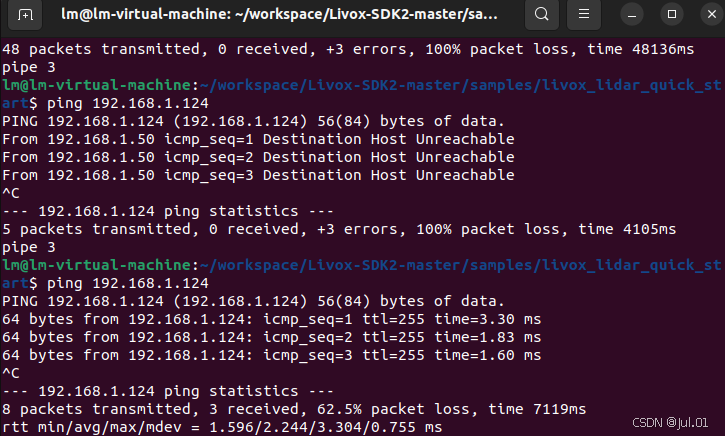
没设置之前:要不ping不通雷达,要不主机不可达
雷达的ip:192.168.1.1xx(xx为雷达上二维码下面一串数字的后两位)
① 我的主机使用的wifi上网,将雷达的网卡插入主机的网口以后需要先在虚拟机设置:
编辑->虚拟网络编辑器->更改设置->选择"是"

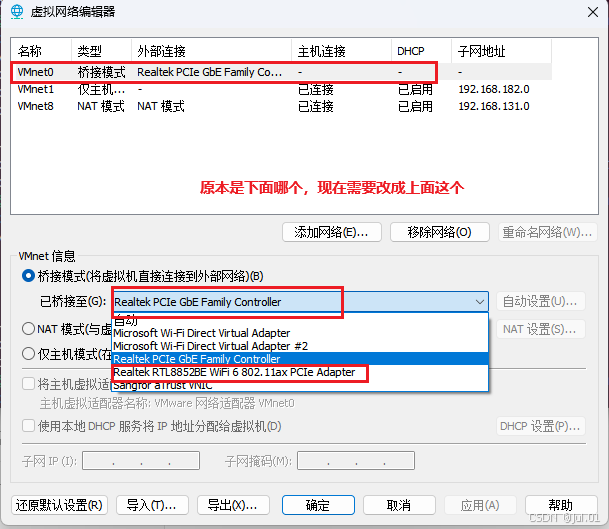
点击应用、确定即可
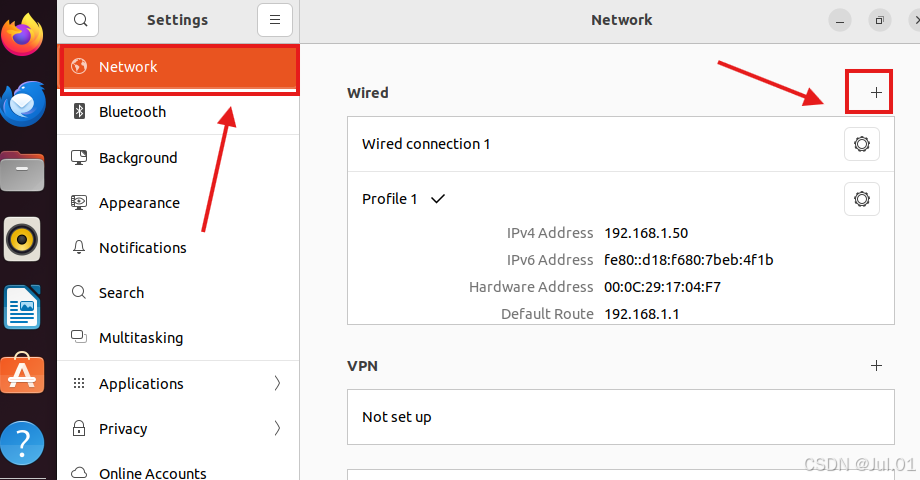
②设置->Network
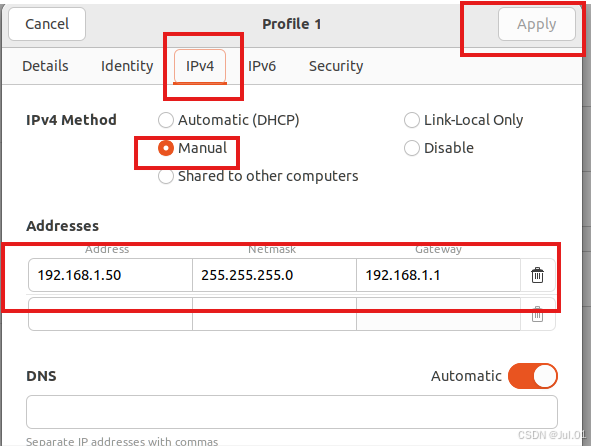
设置完成以后就能ping通雷达:
(2)改配置文件
cd samples/livox_lidar_quick_start/
vi mid360_config.json
修改"host_ip" : "192.168.1.50",
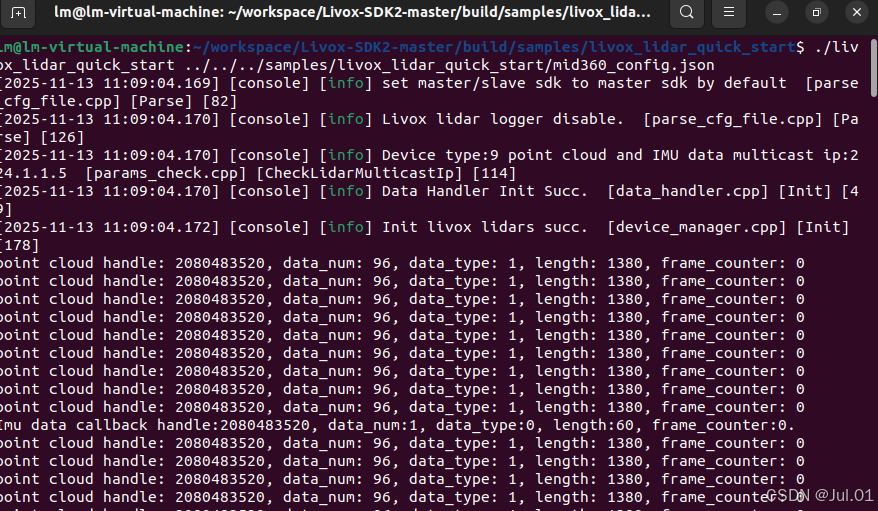
(3)连接好雷达后,执行以下命令:
cd samples/livox_lidar_quick_start
./livox_lidar_quick_start ../../../samples/livox_lidar_quick_start/config file
Windows 10 下运行(未尝试过,参考官方仓库)
Livox-SDK2\build\samples\livox_lidar_quick_start\Debug\
或
Livox-SDK2\build\samples\livox_lidar_quick_start\Release\
将配置文件复制到同一目录下
Livox-SDK2\samples\livox_lidar_quick_start\config file
运行livox_lidar_quick_start.exe config file
3、logger 示例
参数说明
| 参数名 | 说明 | 默认值 |
|---|---|---|
lidar_log_enable |
是否启用雷达日志功能 | true |
lidar_log_cache_size_MB |
日志缓存大小(单位 MB) | 500 |
lidar_log_path |
日志文件保存路径 | "./" |
这些参数可在配置文件 hap_config.json 或 mid360_config.json 中修改。
Ubuntu 20.04 下运行
cd samples/logger ./logger ../../../samples/logger/[config file]
Windows 10 下运行
找到可执行文件:
Livox-SDK2\build\samples\logger\Debug\
或
Livox-SDK2\build\samples\logger\Release\
将配置文件复制到该目录:
Livox-SDK2\samples\logger\[config file]
运行:
logger.exe [config file]
提示: [config file] 同样为配置文件名,可根据不同雷达调整。
4、multi_lidars_upgrade 示例
Ubuntu 下运行
连接雷达后执行:
cd samples/multi_lidars_upgrade ./multi_lidars_upgrade ../../../samples/[config file] [firmware file path]
执行后雷达将停止工作并进入固件升级过程,升级进度会打印在终端,完成后显示:
upgrade successfully
Windows 10 下运行
可执行文件路径:
Livox-SDK2\build\samples\multi_lidars_upgrade\Debug\
或
Livox-SDK2\build\samples\multi_lidars_upgrade\Release\
将配置文件与固件文件复制到该目录中:
Livox-SDK2\samples\multi_lidars_upgrade\[config file]
运行命令:
multi_lidars_upgrade.exe [config file] [firmware file name]
提示: [config file] 为配置文件名,[firmware file name] 为固件文件路径。
5、配置文件说明(config.json)
基本配置示例(最小可用配置)
python
{
"HAP": {
"lidar_net_info" : {
"cmd_data_port" : 56000,
"push_msg_port" : 0,
"point_data_port": 57000,
"imu_data_port" : 58000,
"log_data_port" : 59000
},
"host_net_info" : [
{
"lidar_ip" : ["192.168.1.10","192.168.1.11","192.168.1.12", "192.168.1.13"],
"host_ip" : "192.168.1.5",
"cmd_data_port" : 56000,
"push_msg_port" : 0,
"point_data_port": 57000,
"imu_data_port" : 58000,
"log_data_port" : 59000
}
]
}
}参数解释:
| 字段名 | 说明 |
|---|---|
"HAP" |
雷达类型,可选 "HAP" 或 "MID360" |
"lidar_net_info" |
雷达端口配置 |
"host_net_info" |
主机配置(可配置多个) |
"lidar_ip" |
要连接的雷达 IP 列表 |
"host_ip" |
主机 IP 地址 |
"cmd_data_port" |
控制命令端口 |
"point_data_port" |
点云数据端口 |
"imu_data_port" |
IMU 数据端口 |
"log_data_port" |
日志数据端口 |
完整配置示例(多雷达类型 + 可选参数)
python
{
"master_sdk" : true,
"lidar_log_enable" : true,
"lidar_log_cache_size_MB" : 500,
"lidar_log_path" : "./",
"HAP": {
"lidar_net_info" : {
"cmd_data_port" : 56000,
"push_msg_port" : 0,
"point_data_port": 57000,
"imu_data_port" : 58000,
"log_data_port" : 59000
},
"host_net_info" : [
{
"lidar_ip" : ["192.168.1.10","192.168.1.11","192.168.1.12", "192.168.1.13"],
"host_ip" : "192.168.1.5",
"multicast_ip" : "224.1.1.5",
"cmd_data_port" : 56000,
"push_msg_port" : 0,
"point_data_port": 57000,
"imu_data_port" : 58000,
"log_data_port" : 59000
}
]
},
"MID360": {
"lidar_net_info" : {
"cmd_data_port" : 56100,
"push_msg_port" : 56200,
"point_data_port": 56300,
"imu_data_port" : 56400,
"log_data_port" : 56500
},
"host_net_info" : [
{
"lidar_ip" : ["192.168.1.3"],
"host_ip" : "192.168.1.5",
"multicast_ip" : "224.1.1.5",
"cmd_data_port" : 56101,
"push_msg_port" : 56201,
"point_data_port": 56301,
"imu_data_port" : 56401,
"log_data_port" : 56501
}
]
}
}可选字段说明
| 字段名 | 说明 |
|---|---|
"master_sdk" |
是否为主 SDK,true 为主机,可发送控制命令并接收数据。⚠️ 同一网络中只能有一个主 SDK。 |
"lidar_log_enable" |
是否启用固件日志记录 |
"lidar_log_cache_size_MB" |
日志缓存大小(MB) |
"lidar_log_path" |
日志文件保存路径 |
"multicast_ip" |
多播 IP 地址,用于多雷达场景下的数据同步 |