LSTM作者Hochreiter和Schmidhuber选择乘法门控 而非加法或卷积,是基于理论设计与实验验证的系统性决策,还是"灵光一现"?
以下从三个维度解析这一选择:
一、理论设计:乘法是"门控"的数学本质
1. 门控的物理意义与乘法的完美契合
-
sigmoid输出(0-1)的物理含义:0表示"完全阻断",1表示"完全通过",0.5表示"半开"
-
乘法操作的天然匹配 :
门控值 × 信息流 = 筛选后的信息流 0 × 任何值 = 0 (信息完全丢弃) 1 × 任何值 = 原值 (信息完全保留) 0.5 × 信息流 = 保留50%信息 (精细调节) -
加法的不匹配:加法是信息叠加而非筛选,无法实现"关闭"功能(0+信息流=信息流,无法阻断)
-
卷积的冗余 :卷积用于空间特征提取,而LSTM处理的是时序信息流动,乘法更直接高效
2. 梯度控制:LSTM的核心使命
- 乘法门控实现梯度的"选择性传递":门控值直接乘在梯度上,控制哪些信息的梯度能回传
- 误差流保护机制:作者在原文明确指出:"LSTM使用乘法单元(MUs)来保护错误流免受不必要的扰动"
- 加法会破坏梯度稳定性:加法会导致梯度叠加而非选择性保留,无法解决传统RNN的梯度消失问题
二、原始论文的设计思路
1. 从"恒定误差循环"(CEC)理论推导出门控需求
LSTM的核心创新是细胞状态(cell state)的设计,它像"传送带"一样让信息在序列中稳定传递。作者发现:
- 若要实现长期依赖 (跨越1000+时间步),必须让误差信号能恒定流动,不被权重矩阵放大或缩小
- 乘法门控能精确控制误差流:打开(1)时允许误差通过,关闭(0)时阻止扰动
- 这一设计直接解决了传统RNN因权重矩阵连乘导致的梯度消失/爆炸问题
2. 门控设计的演进过程
从原始论文的思路来看,乘法门控是系统性推导的结果:
| 设计目标 | 解决方案 | 为何选择乘法 |
|---|---|---|
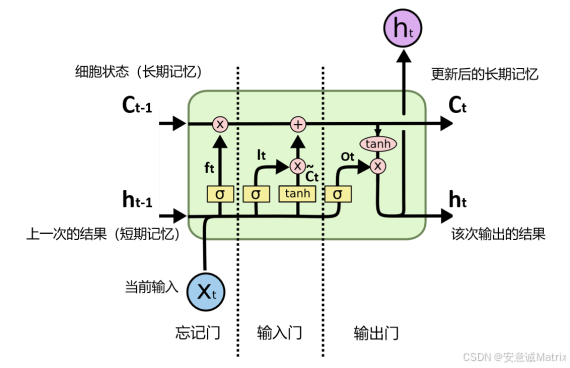
| 控制旧记忆保留量 | 遗忘门(f_t) | 乘法实现"保留部分旧信息",加法会完全改变信息内容 |
| 控制新信息写入量 | 输入门(i_t) | 乘法让新候选记忆(C̃_t)按比例融入,加法会导致信息混杂 |
| 控制输出信息筛选 | 输出门(o_t) | 乘法让隐藏状态(h_t)只输出相关信息,加法会泄露无关内容 |
三、实验验证与对比分析
1. 原始论文中的实验验证
虽然论文未详细描述"尝试多种门控方式"的过程,但明确报告了LSTM在多项复杂任务上的突破性表现:
- 人工长期依赖任务:LSTM能学习跨越1000+时间步的依赖关系,这是当时其他RNN无法完成的
- 序列记忆任务:能在最小延迟T/2时间步内存储连续值而不显著退化
- 与传统RNN对比:"LSTM outperforms them, and also learns to solve complex, artificial tasks no other recurrent net algorithm has solved"
2. 后续研究的验证与变体
学术界对LSTM门控机制的研究表明:
- GRU变体 :将遗忘门和输入门合并为"更新门",但仍保留乘法门控本质,证明乘法是门控机制的核心
- ConvLSTM :在空间数据处理中用卷积替代全连接,但门控操作仍保留乘法,说明乘法是门控的最佳选择
- 减法门控等变体虽有研究,但性能普遍不如乘法门控,证明乘法的选择有其必然性
四、总结:乘法选择的必然性
LSTM作者选择乘法门控是理论设计+实验验证的结果,而非偶然灵感:
-
数学本质契合 :乘法是实现"门控"概念(0-1控制)的唯一自然选择,加法适合信息叠加,卷积适合空间特征提取,均不适用于时序信息筛选
-
梯度控制必需:乘法直接作用于梯度流,实现LSTM的核心使命------解决长期依赖问题,这是加法等操作无法实现的
-
效率与简洁:乘法运算在计算图中实现简单高效,适合时序模型的实时处理需求
实验证明:自1997年提出以来,LSTM的乘法门控结构经受住了时间和各种复杂任务的考验,成为序列建模领域的标准架构。即使后续出现GRU等变体,也都保留了乘法门控的核心思想,这是对原始设计正确性的最强证明。