1.线程库的基本使用
在C++11中引入了原生的线程支持,包含在<thread>头文件中,我们下面来看看该线程库的基本使用方法,先看下面这段程序。
cpp
#include <iostream>
#include <thread>
void show(void)
{
std::cout << "hello thread" << std::endl;
}
int main()
{
std::thread thread(show);
std::cout << "main" << std::endl;
return 0;
}我们创建了一个线程对象,将show函数作为入口传入。当我们运行时有以下运行结果:
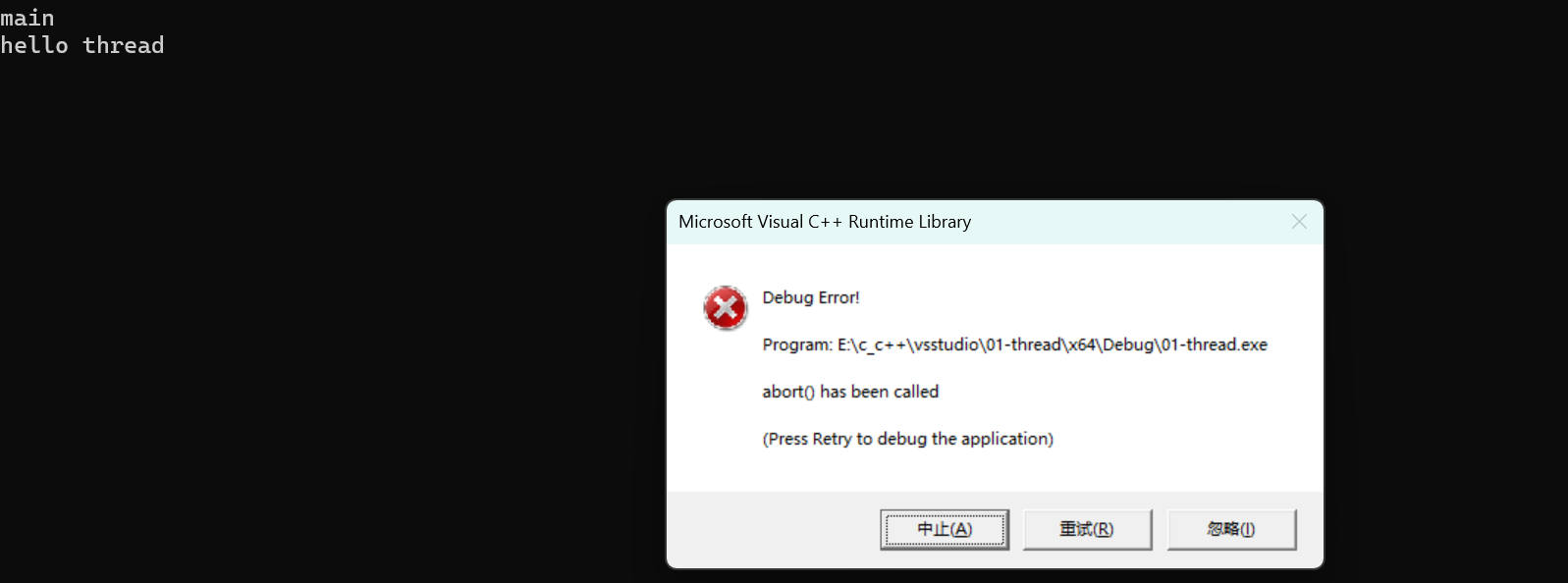
虽然我们的hello thread成功输出出来了,但是却出现了错误,这是因为在我们子线程还没有结束时,我们的main线程已经return结束啦,就导致出现了错误。那么怎么办呢?我们来看下面这段程序:
cpp
#include <iostream>
#include <thread>
void show(void)
{
std::cout << "hello thread" << std::endl;
}
int main()
{
std::thread thread(show);
std::cout << "main" << std::endl;
thread.join();
return 0;
}我们再来看运行结果:
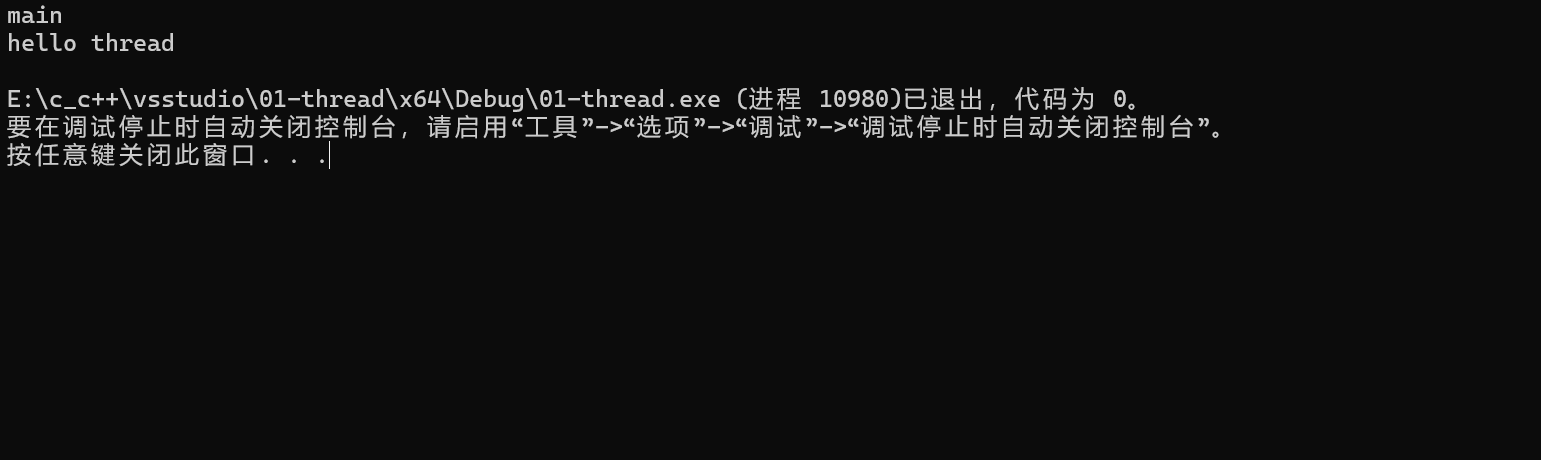
可见我们在main结束前加入了一句thread.join()就解决了这个问题,这是因为当这个调用时一个阻塞调用,主线程运行到这里后就会被阻塞,只有当子线程结束后主线程才能进行往下执行。所以就解决了上面子线程还没有结束主线程就结束了导致的报错,我们将上面的程序修改一下会有更明显得体现,如下:
cpp
#include <iostream>
#include <thread>
void show(void)
{
for (int i = 0; i < 100000; i++)
{
std::cout << "hello thread" << std::endl;
}
}
int main()
{
std::thread thread(show);
thread.join();
std::cout << "main" << std::endl;
return 0;
}运行结果为:
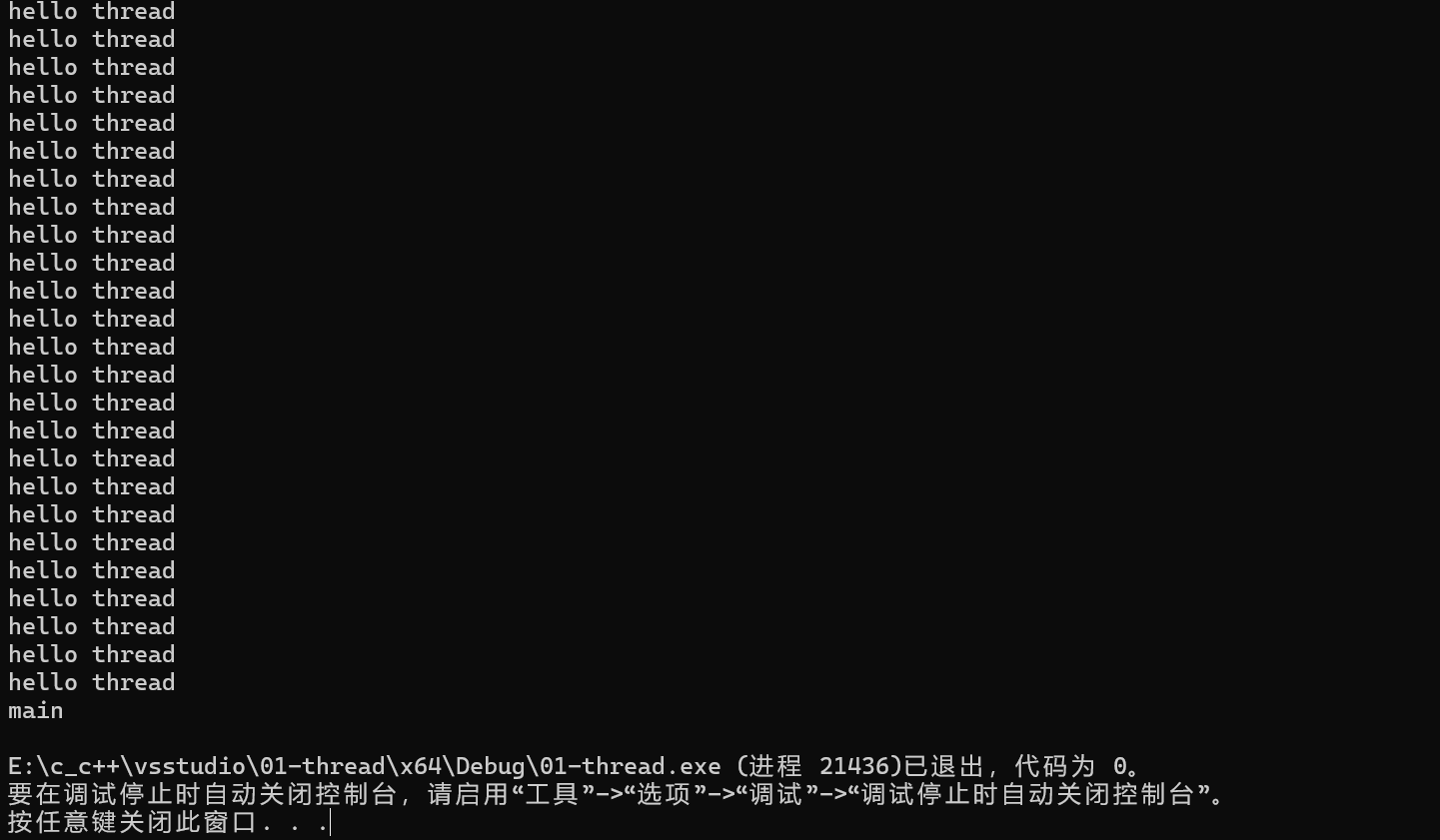
可见mian的输出是在子线程输出完后再输出的。当然我们还可以是用另一个方法来解决上面报错问题。
cpp
#include <iostream>
#include <thread>
void show(void)
{
std::cout << "hello thread" << std::endl;
}
int main()
{
std::thread thread(show);
std::cout << "main" << std::endl;
thread.detach();
return 0;
}运行结果为:
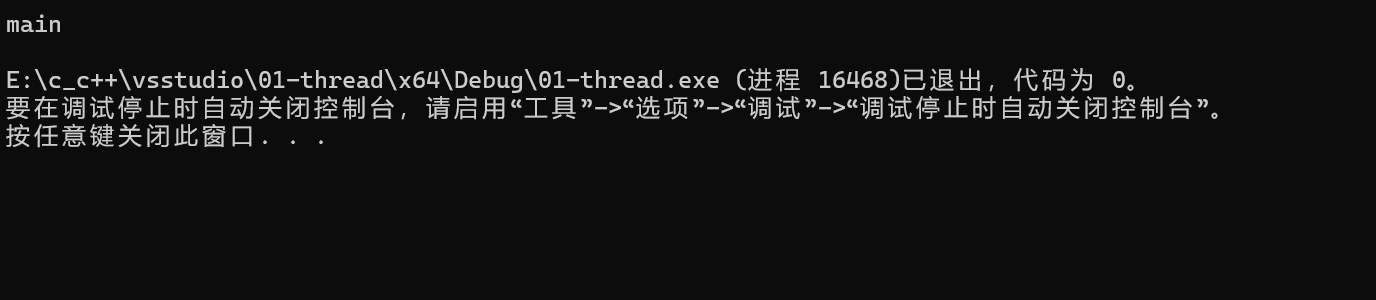
我们可以看到确实没有报错了,但是我们的hellothread确没有被输出出来。这是因为当主函数运行到thread.detach时子线程和主线程分离了,子线程进入后台执行,而主线程后面就立即结束了,所以就没有输出,但是主线程结束后子线程还可以自动在后台运行。接着我们来看看当要传入参数怎么书写程序:
cpp
#include <iostream>
#include <thread>
#include <string>
using namespace std;
void show(string s)
{
cout << s << endl;
}
int main()
{
thread thread(show,"hello thread");
cout << "main" << endl;
thread.join();
return 0;
}我们只需要在创建thread对象,传入一个所需的参数即可。看运行结果:
2.线程使用过程中的易错问题
(1)线程间传递临时变量
我们来看下面的程序:
cpp
#include <iostream>
#include <thread>
#include <string>
using namespace std;
void process(int& n)
{
n += 1;
}
int main()
{
int data = 1;
thread thread(process,data);
thread.join();
cout << "data=" << data << endl;
return 0;
}我们想启用一个线程process对我们创建的data进行加1操作时用上面的程序能不能做到呢,看运行结果:
可见直接出现了错误,这是因为我们在线程间传递临时变量出现的错误,我们通过std::ref来解决该问题程序如下所示:
cpp
#include <iostream>
#include <thread>
#include <string>
using namespace std;
void process(int& n)
{
n += 1;
}
int main()
{
int data = 1;
thread thread(process,ref(data));
thread.join();
cout << "data=" << data << endl;
return 0;
}(2)传递指针和引用时指向局部变量
我们看下面这段程序:
cpp
#include <iostream>
#include <thread>
#include <string>
using namespace std;
thread t;
void process(int& n)
{
n += 1;
}
void func(void)
{
int data = 1;
t = thread(process, ref(data));
}
int main()
{
func();
t.join();
return 0;
}我们可以知道data局部变量在func函数结束后会被释放,所以等到引用n在使用data那块空间时已经被释放了所以就会出现报错,指针也是一样的,那么怎么解决呢?我们可以将data定义为全局变量即可。
(3)类成员函数作为入口参数,类对象被提前释放
我们看下面这段程序:
cpp
#include <iostream>
#include <thread>
#include <string>
using namespace std;
class A {
public:
void show()
{
cout << "A" << endl;
}
};
int main()
{
A a;
thread t(&A::show,&a);
return 0;
}当线程的入口参数时类成员函数时,我们还要将类的对象的地址也作为参数传入。这里因为我们创建一个对象所以我们要进行销毁,但是销毁的时机我们却不好把握。这里如果当对象a被提前销毁了,而线程想要使用类的成员函数就会出现问题。对于这个问题我们可以使用智能指针的方法来解决。看下面的程序:
cpp
#include <iostream>
#include <thread>
#include <string>
#include <memory>
using namespace std;
thread t;
class A {
public:
void show()
{
cout << "A" << endl;
}
};
int main()
{
shared_ptr<A> a = make_shared<A>();
thread t(&A::show, a);
t.join();
return 0;
}对于智能指针来说,当其在没有地方使用时就会自动释放掉,既不会造成内存的泄露,也能更好的让线程执行类的成员函数。
(4)使用类的私有成员函数作为线程的入口参数
对于这个问题,我们可以使用友元函数进行解决,如下:
cpp
#include <iostream>
#include <thread>
#include <string>
#include <memory>
using namespace std;
thread t;
class A {
private:
friend void func();
void show()
{
cout << "A" << endl;
}
};
void func()
{
shared_ptr<A> a = make_shared<A>();
thread t(&A::show, a);
t.join();
}
int main()
{
func();
return 0;
}