目录
[1.1 克拉克变换](#1.1 克拉克变换)
[1.1.1 先说结论](#1.1.1 先说结论)
[1.1.2 克拉克基本形式](#1.1.2 克拉克基本形式)
[1.1.3 等幅值克拉克变换](#1.1.3 等幅值克拉克变换)
[1.1.4 克拉克逆变换](#1.1.4 克拉克逆变换)
[1.2 帕克变换](#1.2 帕克变换)
[1.2.1 QD坐标系的引入](#1.2.1 QD坐标系的引入)
[1.2.2 帕克正变换与逆变换](#1.2.2 帕克正变换与逆变换)
[2.1 核心思想](#2.1 核心思想)
[2.2 三相电压矢量](#2.2 三相电压矢量)
[2.3 机械角度与电角度的关系](#2.3 机械角度与电角度的关系)
[2.4 伪代码部分](#2.4 伪代码部分)
[2.4.1 预设部分](#2.4.1 预设部分)
[2.4.2 PWM](#2.4.2 PWM)
[2.4.3 克拉克与帕克逆变换](#2.4.3 克拉克与帕克逆变换)
[2.4.4 Uq和电角度生成](#2.4.4 Uq和电角度生成)
[3.1 控制思想](#3.1 控制思想)
[3.2 伪代码](#3.2 伪代码)
[3.2.1 AS5600读取](#3.2.1 AS5600读取)
[3.2.2 位置环控制](#3.2.2 位置环控制)
一、理论基础
1.1 克拉克变换
1.1.1 先说结论
克拉克基本形式:
克拉克变换等幅值:
克拉克逆变换:
1.1.2 克拉克基本形式
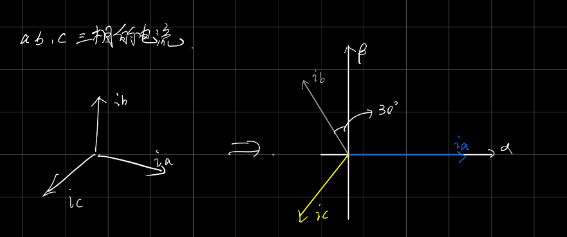
目的:三相波形相位差比较难控制,利用克拉克变换降维解耦,映射到二维坐标上面;
三相电流波形 -> 相位差为120°的矢量 -> 二维坐标
对 α 轴的推导:
因 :
故:
对 β 轴的推导:
因:
故:
矩阵化:
1.1.3 等幅值克拉克变换
从1.1.2 克拉克基本形式 计算发现
;
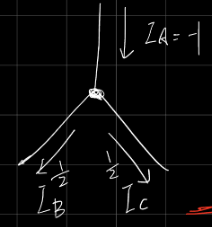
上述图片中,由基尔霍夫电流定律可知:
IA+IB+IC=0
我们把这个值代入克拉克变换基本形式计算:
此时结论是:
我们需要让 a 相电流直接等于 α 轴分量,从而可以只采集两路电流并省去一次额外的乘法/矩阵运算
这时候可以乘上 2/3 就可以实现相等,也就是等幅值形式
此时:
(结合基尔霍夫电流定律:
将
所以,我们只需要知道其中两相电流,也就是 ib 和 ia,这时候就可以知道
1.1.4 克拉克逆变换
1.2 帕克变换
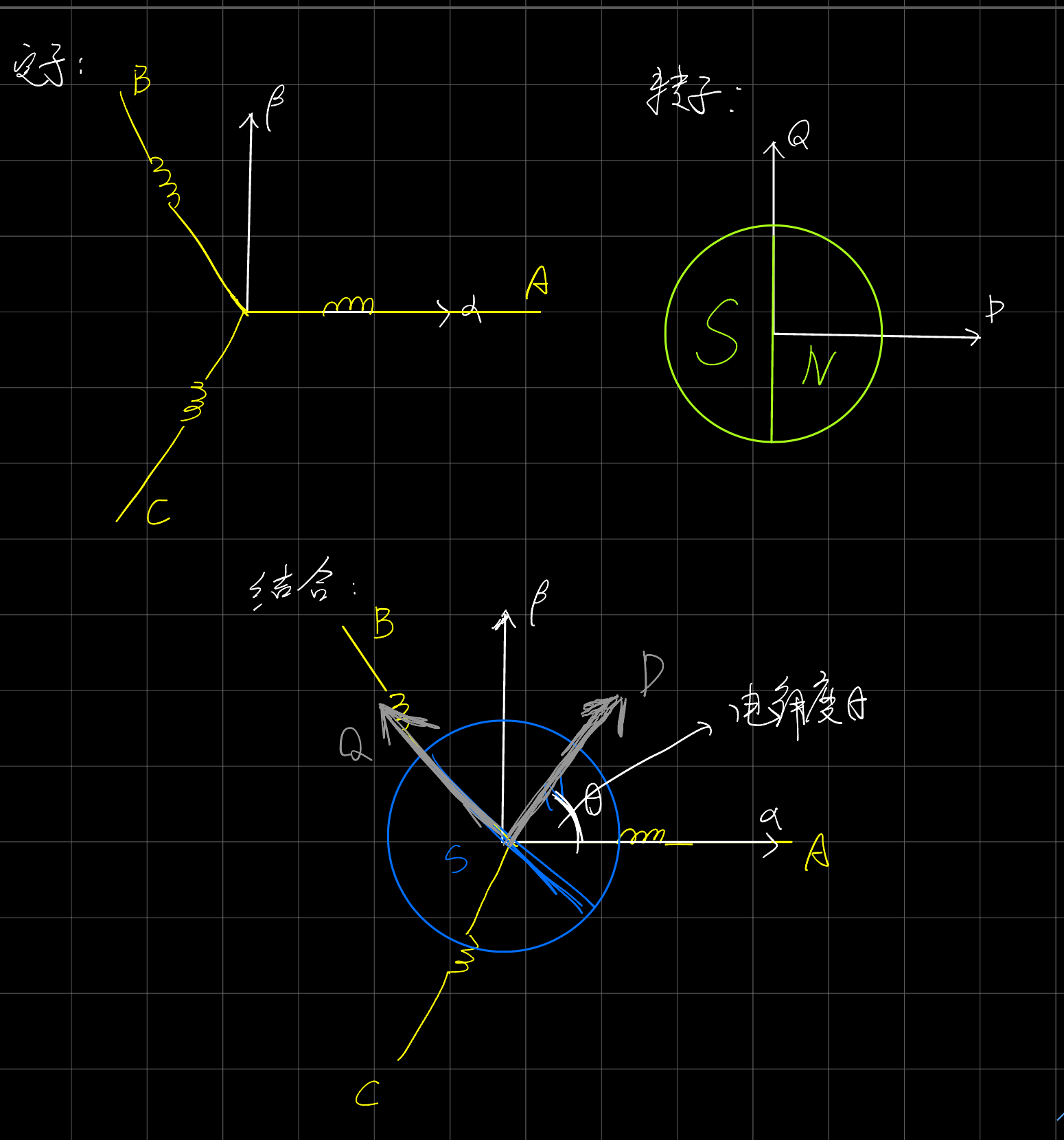
1.2.1 QD坐标系的引入
之前克拉克变换时,是在定子线圈那里的,或者说是固定的。
但是转子是转动的,所以引入Q-D坐标系;
在转动过程中会与
1.2.2 帕克正变换与逆变换
帕克正变换:
矩阵化:
帕克正变换:
帕克逆变换:
逆变换展开式:
二、开环速度控制
2.1 核心思想
- 输入期望的速度
- 生成Uq和旋转电角度
- 根据电角度进行帕克变换生成
- 根据
- 利用三相分量来控制PWM输出该为多少
2.2 三相电压矢量
上面提到过了帕克变换、克拉克变换,都是电流形式;
在实际控制时,一般是用PWM占空比来控制电压,所以乘上一个电阻R,转成电压形式;
电压的帕克逆变换矩阵形式:
派克逆变换展开式:
αβ 坐标系到 abc 坐标系(三相)的电压变换:
2.3 机械角度与电角度的关系
电角度 = 机械角度 x 极对数
**极对数:**电机磁极对数,1个N极和1个S极为一对磁极;
比如机械角度旋转一圈,但是里面N对磁极,切割了N次,发了N个周期的电;
2.4 伪代码部分
2.4.1 预设部分
cpp/* pwm输出引脚假设 30Khz int pwmA = 32; int pwmB = 33; int pwmC = 25; */ //限制幅值 #define _constrain(amt,low,high) ((amt)<(low)?(low):((amt)>(high)?(high):(amt))) float voltage_limit = 10; float voltage_power_supply = 12.6; //供电电压 float shaft_angle=0, open_loop_timestamp=0; float zero_electric_angle=0, Ualpha, Ubeta=0, Ub=0, Uc=0, dc_a=0, dc_b=0, dc_c=0; // 电角度求解 // 机械角度*极对数 float _electricalAngle(float shaft_angle, int pole_pairs) { return (shaft_angle * pole_pairs); } // 归一化角度到 [0,2PI] // 前面取余,后面映射到[0,2PI] float _normalizeAngle(float angle){ float a = fmod(angle, 2*PI); //取余运算可以用于归一化,列出特殊值例子算便知 return a >= 0 ? a : (a + 2*PI);
2.4.2 PWM
cpp// 设置PWM到控制器输出 void setPwm(float Ua, float Ub, float Uc) { //限制上限 Ua = _constrain(Ua, 0.0f, voltage_limit); Ub = _constrain(Ua, 0.0f, voltage_limit); Uc = _constrain(Ua, 0.0f, voltage_limit); // 计算占空比 // 限制占空比从0到1 dc_a = _constrain(Ua / voltage_power_supply, 0.0f , 1.0f ); dc_b = _constrain(Ub / voltage_power_supply, 0.0f , 1.0f ); dc_c = _constrain(Uc / voltage_power_supply, 0.0f , 1.0f ); //写入PWM到PWM 0 1 2 通道 ledcWrite(0, dc_a*255); ledcWrite(1, dc_b*255); ledcWrite(2, dc_c*255); }
2.4.3 克拉克与帕克逆变换
cppvoid setPhaseVoltage(float Uq,float Ud, float angle_el) { angle_el = _normalizeAngle(angle_el + zero_electric_angle); // 帕克逆变换 Ualpha = -Uq*sin(angle_el); Ubeta = Uq*cos(angle_el); // 克拉克逆变换 Ua = Ualpha + voltage_power_supply/2; Ub = (sqrt(3)*Ubeta-Ualpha)/2 + voltage_power_supply/2; Uc = (-Ualpha-sqrt(3)*Ubeta)/2 + voltage_power_supply/2; setPwm(Ua,Ub,Uc); }
2.4.4 Uq和电角度生成
cpp// 输入速度为rad/s float velocityOpenloop(float target_velocity){ //计算循环间隔 unsigned long now_us = micros(); float Ts = (now_us - open_loop_timestamp) * 1e-6f; // micros() 溢出时,修正Ts if(Ts <= 0 || Ts > 0.5f) Ts = 1e-3f; //根据给定的速度,每次循环计算一下新的轴角度(机械角度) shaft_angle = _normalizeAngle(shaft_angle + target_velocity*Ts); float Uq = voltage_power_supply/3; setPhaseVoltage(Uq, 0, _electricalAngle(shaft_angle, 7)); open_loop_timestamp = now_us; //用于计算下一个时间间隔 return Uq; }
三、闭环位置控制
3.1 控制思想
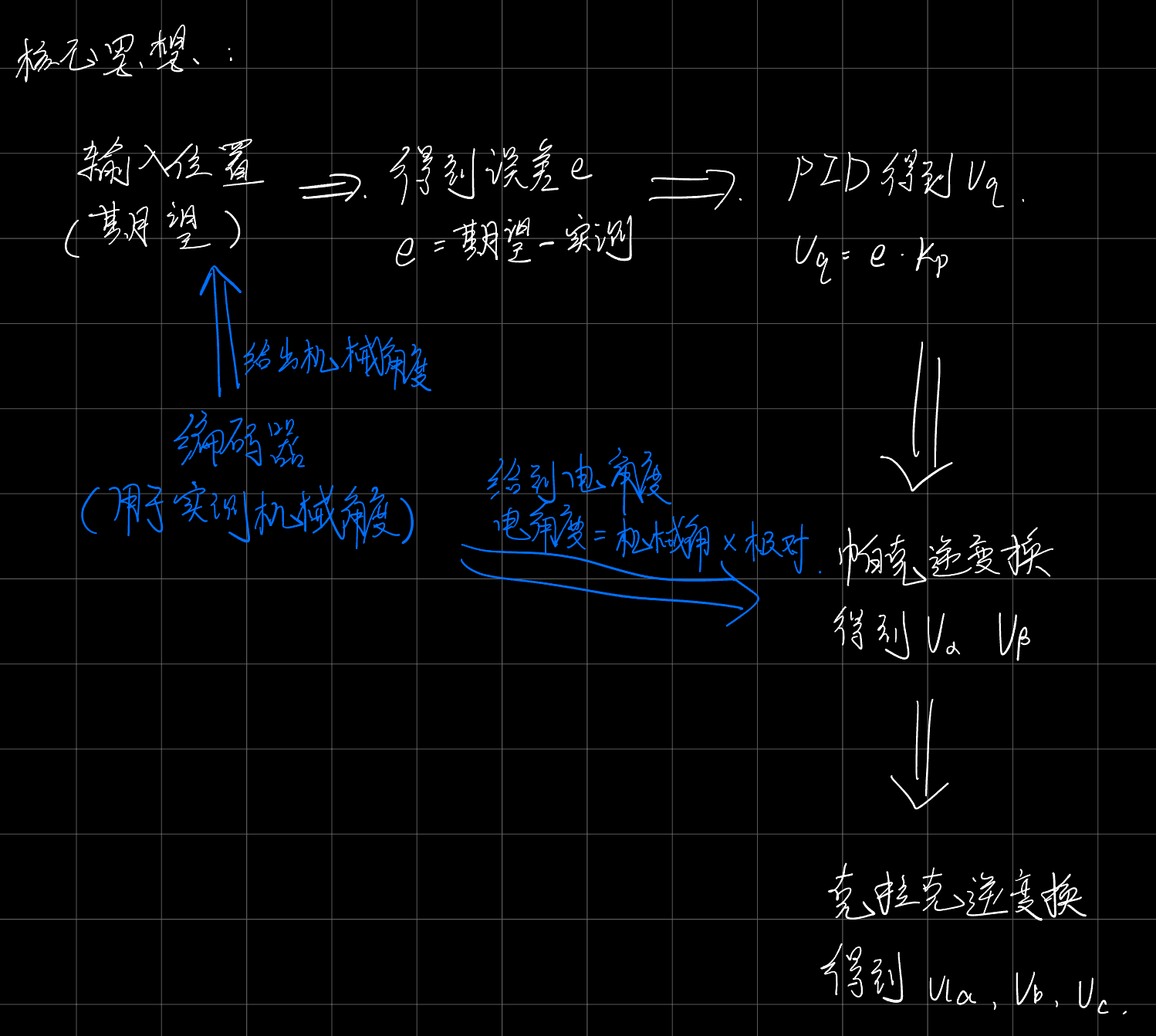
根据输入位置得到三相电压
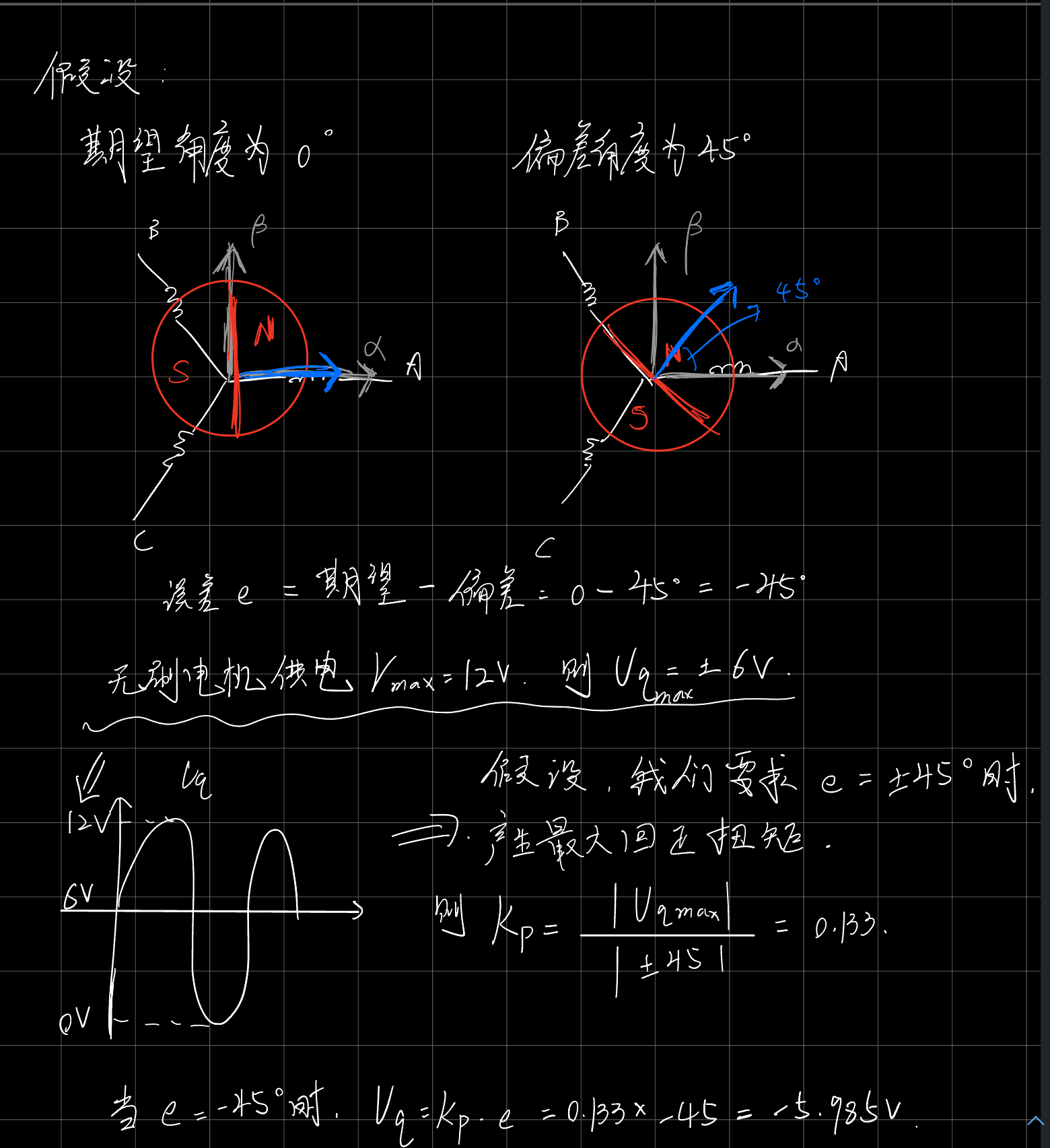
输入期望位置 ,与编码器(实测机械角度)输出的机械角度 计算得到误差 e :
e = 期望位置 - 实测机械角度
误差 e 经 PID 运算 ,得到
(
实测机械角度转换为 电角度:电角度 = 机械角 * 极对数
电角度与
3.2 伪代码
3.2.1 AS5600读取
cppint _ams5600_Address = 0x36; // AS5600的I2C地址 int _raw_ang_hi = 0x0c; //这两个是未处理的数据 int _raw_ang_lo = 0x0d; int _angle_hi = 0x0e; int _angle_lo = 0x0f; //这两个是经过IC处理后的数据 int ledtime = 0; int32_t full_rotations=0; // full rotation tracking; float angle_prev=0; //这个是ESP32初始化的东西 void BeginSensor() { Wire.begin(19,18, 400000UL); delay(1000); } //I2C读取数据,并整合成16位; word readTwoBytes(int in_adr_hi, int in_adr_lo) { word retVal = -1; /* 读低位 */ Wire.beginTransmission(_ams5600_Address); Wire.write(in_adr_lo); Wire.endTransmission(); Wire.requestFrom(_ams5600_Address, 1); while(Wire.available() == 0); int low = Wire.read(); /* 读高位 */ Wire.beginTransmission(_ams5600_Address); Wire.write(in_adr_hi); Wire.endTransmission(); Wire.requestFrom(_ams5600_Address, 1); while(Wire.available() == 0); int high = Wire.read(); retVal = (high << 8) | low; return retVal; } //这个是包含圈数的 word getRawAngle() { return readTwoBytes(_raw_ang_hi, _raw_ang_lo); } //这个是不包含圈数的 float getAngle_Without_track() { return getRawAngle()*0.08789* PI / 180; //得到弧度制的角度 } float getAngle() { float val = getAngle_Without_track(); float d_angle = val - angle_prev; //计算旋转的总圈数 //通过判断角度变化是否大于80%的一圈(0.8f*6.28318530718f)来判断是否发生了溢出,如果发生了,则将full_rotations增加1(如果d_angle小于0)或减少1(如果d_angle大于0)。 if(abs(d_angle) > (0.8f*6.28318530718f) ) full_rotations += ( d_angle > 0 ) ? -1 : 1; angle_prev = val; return (float)full_rotations * 6.28318530718f + angle_prev; }
3.2.2 位置环控制
首先获取AS5600得到的位置反馈信息,
Kp = 0.133根据 3.1部分进行计算得到的;
_constrain 用于限制电压幅度;
_electricalAngle 用于计算电角度,这里PP是极对数;
setPhaseVoltage 用于逆解出三相电压;
cpp#define _constrain(amt,low,high) ((amt)<(low)?(low):((amt)>(high)?(high):(amt))) float _electricalAngle(){ return _normalizeAngle((float)(DIR * PP) * getAngle_Without_track()-zero_electric_angle); } void setPhaseVoltage(float Uq,float Ud, float angle_el) { angle_el = _normalizeAngle(angle_el); // 帕克逆变换 Ualpha = -Uq*sin(angle_el); Ubeta = Uq*cos(angle_el); // 克拉克逆变换 Ua = Ualpha + voltage_power_supply/2; Ub = (sqrt(3)*Ubeta-Ualpha)/2 + voltage_power_supply/2; Uc = (-Ualpha-sqrt(3)*Ubeta)/2 + voltage_power_supply/2; setPwm(Ua,Ub,Uc); } void loop() { // put your main code here, to run repeatedly: Serial.println(getAngle()); float Sensor_Angle=getAngle(); float Kp=0.133; //设置位置环输出 //DIR为方向系数,1为顺时针,-1为逆时针 // setPhaseVoltage(_constrain(Kp*(motor_target-DIR*Sensor_Angle)*180/PI,-6,6),0,_electricalAngle()); serialReceiveUserCommand(); }