文章目录
一、边缘检测方法
1. Sobel算子边缘检测
Sobel算子通过计算图像灰度函数的梯度来检测边缘,分别计算水平和垂直方向的梯度,然后合并得到完整边缘图像。
python
import cv2
pic = cv2.imread(r"picture_1.jpg", 0)
pic_x_64 = cv2.Sobel(pic, cv2.CV_64F, dx=1, dy=0)
pic_x_full = cv2.convertScaleAbs(pic_x_64)
pic_y_64 = cv2.Sobel(pic, cv2.CV_64F, dx=0, dy=1)
pic_y_full = cv2.convertScaleAbs(pic_y_64)
pic_xy_sobel_full = cv2.addWeighted(pic_x_full, 1, pic_y_full, 1, 0)参数分析:
cv2.CV_64F:输出图像的深度,64位浮点数类型dx=1, dy=0:计算x方向(水平)梯度dx=0, dy=1:计算y方向(垂直)梯度cv2.convertScaleAbs():将负梯度值转换为绝对值并缩放
2. Scharr算子边缘检测
Scharr算子是Sobel算子的改进版本,对边缘的响应更敏感,能检测到更细微的边缘变化。
python
pic = cv2.imread(r"picture_1.jpg", cv2.IMREAD_GRAYSCALE)
pic_x_64 = cv2.Scharr(pic, cv2.CV_64F, dx=1, dy=0)
pic_x_full = cv2.convertScaleAbs(pic_x_64)
pic_y_64 = cv2.Scharr(pic, cv2.CV_64F, dx=0, dy=1)
pic_y_full = cv2.convertScaleAbs(pic_y_64)
pic_xy_scharr_full = cv2.addWeighted(pic_x_full, 1, pic_y_full, 1, 0)3. Laplacian边缘检测
Laplacian算子基于二阶导数,能同时检测图像的两个方向的边缘,对噪声更敏感但能检测到更精细的边缘。
python
pic = cv2.imread(r"picture_1.jpg", cv2.IMREAD_GRAYSCALE)
pic_lap = cv2.Laplacian(pic, cv2.CV_64F, ksize=3)
pic_lap_full = cv2.convertScaleAbs(pic_lap)参数分析:
ksize=3:拉普拉斯核的大小,必须为正奇数
4. Canny边缘检测
Canny边缘检测是多阶段算法,包括高斯滤波、梯度计算、非极大值抑制和双阈值检测,是效果最好的边缘检测算法之一。
python
pic = cv2.imread(r"picture_1.jpg", cv2.IMREAD_GRAYSCALE)
pic_canny = cv2.Canny(pic, 100, 150)参数分析:
100:低阈值,低于此值的边缘被丢弃150:高阈值,高于此值的边缘被保留为强边缘
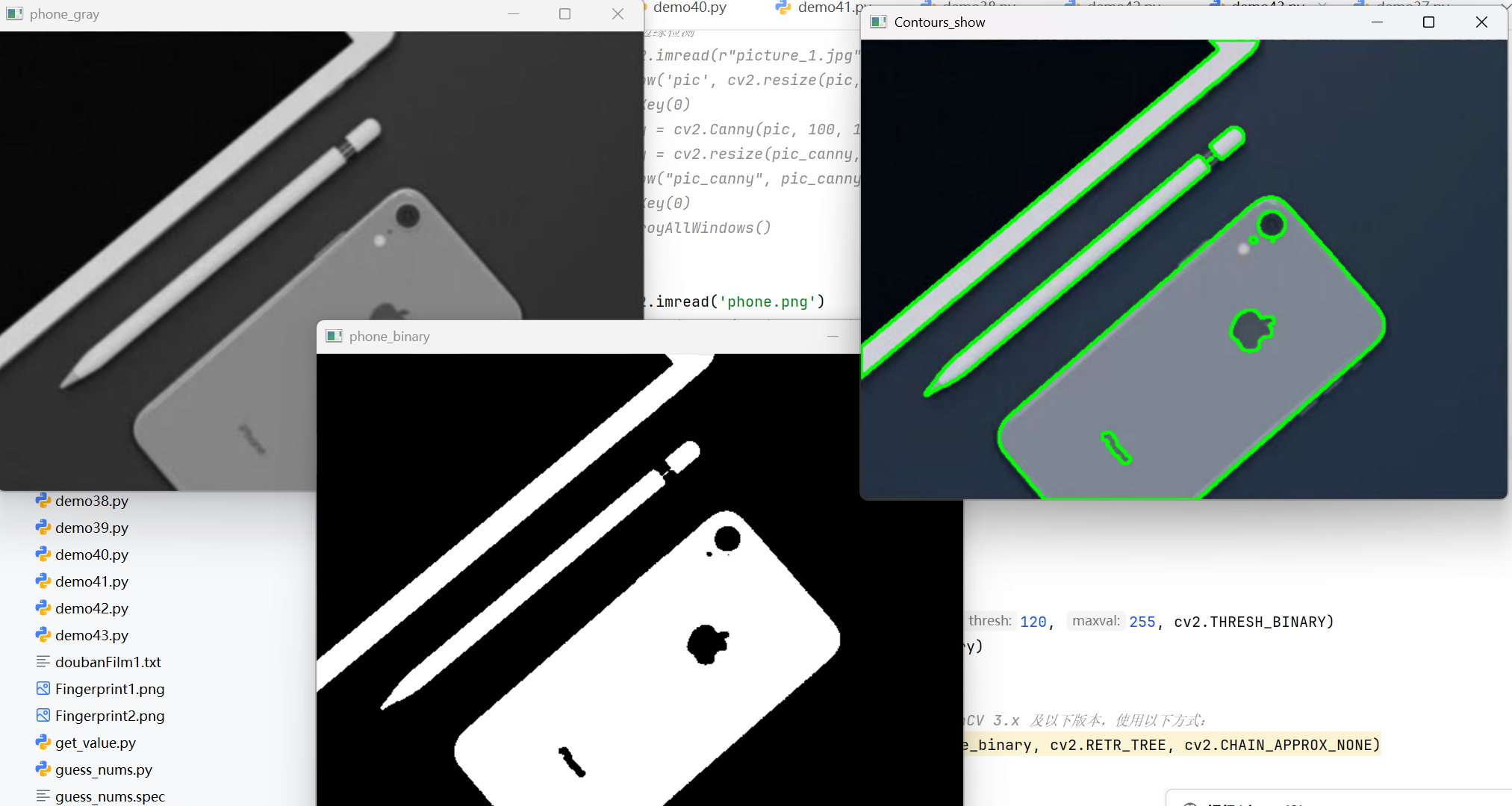
二、图像轮廓分析
1. 轮廓提取基础
轮廓提取需要先将图像转换为二值图像,然后使用findContours函数查找轮廓。
python
# 灰度图处理
phone = cv2.imread(r"picture_1.jpg")
phone = cv2.resize(phone, dsize=None, fx=0.4, fy=0.4)
phone_gray = cv2.cvtColor(phone, cv2.COLOR_BGR2GRAY)
# 阈值处理为二值图像
ret, phone_binary = cv2.threshold(phone_gray, 120, 255, cv2.THRESH_BINARY)
# 查找轮廓
_, contours, hierarchy = cv2.findContours(phone_binary, cv2.RETR_TREE, cv2.CHAIN_APPROX_NONE)
print(len(contours))参数分析:
cv2.THRESH_BINARY:阈值化类型,大于阈值设为255,小于设为0cv2.RETR_TREE:轮廓检索模式,检索所有轮廓并重建完整的层次结构cv2.CHAIN_APPROX_NONE:轮廓近似方法,存储所有轮廓点

2. 轮廓绘制方法
python
image_copy = phone.copy()
cv2.drawContours(image=image_copy, contours=contours, contourIdx=-1, color=(0, 255, 0), thickness=2)
# 逐个绘制轮廓的替代方法
for i in range(len(contours)):
image_copy = cv2.drawContours(image=image_copy, contours=contours, contourIdx=i, color=(0, 255, 0), thickness=3)
cv2.imshow('Contours_show', image_copy)
cv2.waitKey(0)参数分析:
contourIdx=-1:绘制所有轮廓,指定索引则绘制单个轮廓
3. 轮廓特征计算
python
# 轮廓面积计算
area_0 = cv2.contourArea(contours[0])
area_1 = cv2.contourArea(contours[1])
# 轮廓周长计算
length = cv2.arcLength(contours[0], closed=True)
# 根据面积筛选轮廓
a_list = []
for i in contours:
if cv2.contourArea(i) > 10000:
a_list.append(i)4. 轮廓定位与排序
python
# 根据面积排序获取最大轮廓
sortcnt = sorted(contours, key=cv2.contourArea, reverse=True)[0]
image_contours = cv2.drawContours(image_copy, [sortcnt], contourIdx=-1, color=(0, 0, 255), thickness=3)5. 轮廓几何特征
python
cnt = contours[8]
# 最小外接圆
(x, y), r = cv2.minEnclosingCircle(cnt)
phone_circle = cv2.circle(phone, center=(int(x), int(y)), radius=int(r), color=(0, 255, 0), thickness=2)
# 最小外接矩形
x, y, w, h = cv2.boundingRect(cnt)
phone_rectangle = cv2.rectangle(phone, pt1=(x, y), pt2=(x + w, y + h), color=(0, 255, 0), thickness=2)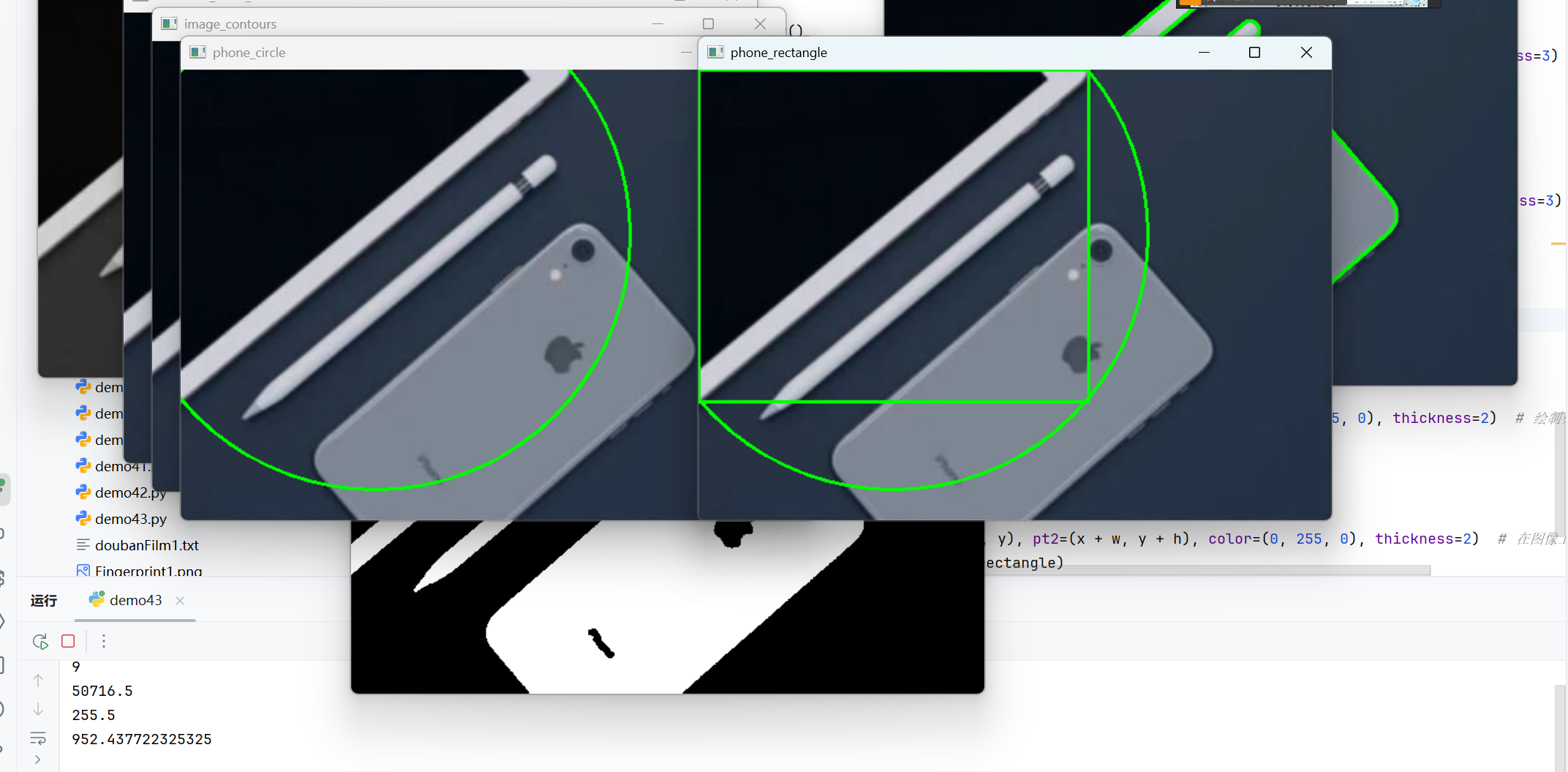
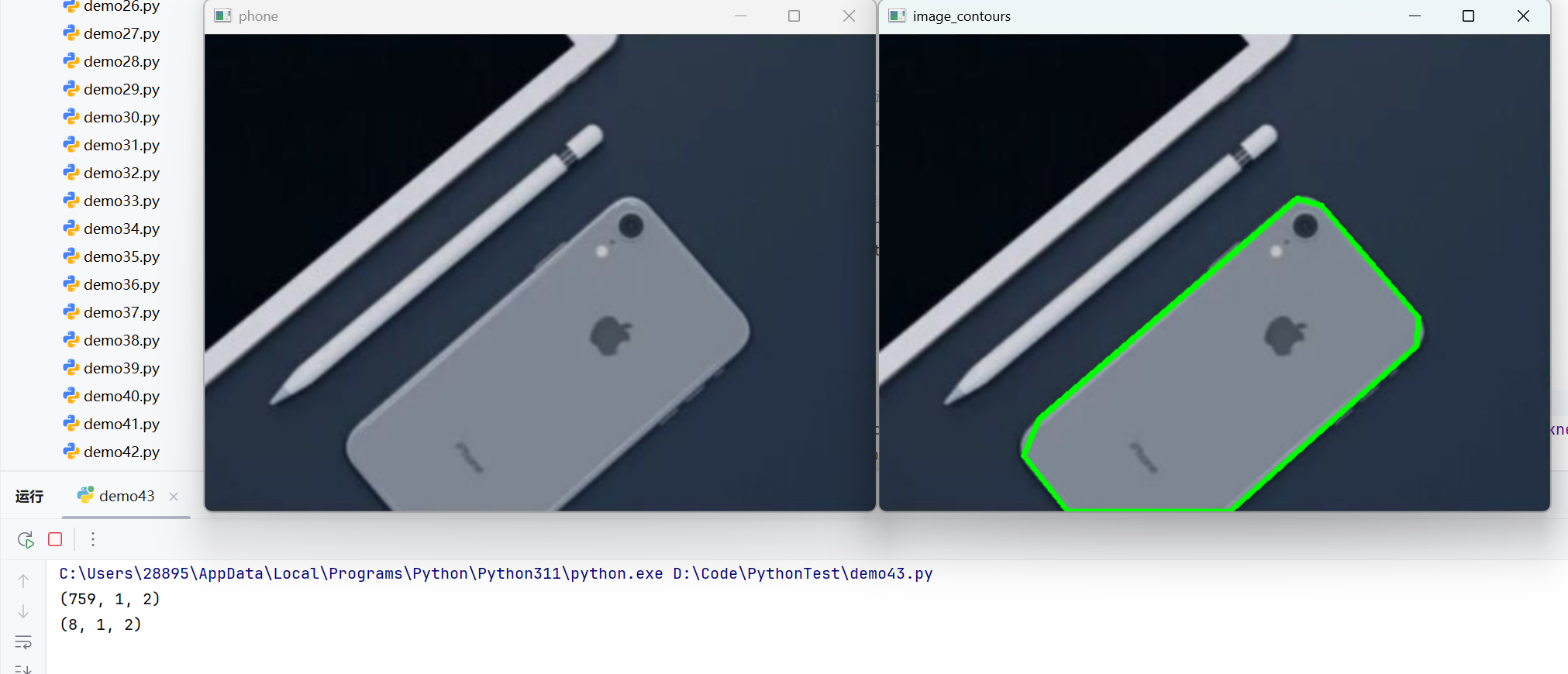
三、轮廓近似与简化
轮廓近似可以减少轮廓点的数量,同时保持轮廓的基本形状,常用于减少计算复杂度和数据存储。
python
phone = cv2.imread('phone.png')
phone_gray = cv2.cvtColor(phone, cv2.COLOR_BGR2GRAY)
ret, phone_thresh = cv2.threshold(phone_gray, 120, 255, cv2.THRESH_BINARY)
# 兼容不同OpenCV版本的轮廓查找
contours = cv2.findContours(phone_thresh, cv2.RETR_TREE, cv2.CHAIN_APPROX_NONE)[-2]
# 轮廓近似
epsilon = 0.01 * cv2.arcLength(contours[0], closed=True)
approx = cv2.approxPolyDP(contours[0], epsilon, closed=True)
print(contours[0].shape) # 原始轮廓点数
print(approx.shape) # 近似后轮廓点数
# 绘制近似轮廓
phone_new = phone.copy()
image_contours = cv2.drawContours(phone_new, [approx], contourIdx=-1, color=(0, 255, 0), thickness=3)参数分析:
epsilon:近似精度参数,通常取轮廓周长的百分比closed=True:指示轮廓是封闭的