在计算机视觉领域,图像金字塔与直方图是两大基础且实用的技术。图像金字塔用于处理不同分辨率的图像,广泛应用于图像融合、超分辨率重建等场景;直方图则用于描述图像像素分布,是图像增强、阈值分割的核心工具。本文将结合完整代码,逐行拆解两大技术的实现逻辑与关键知识点。
一、图像金字塔:多分辨率图像处理工具
图像金字塔是由同一图像不同分辨率的子图构成的集合,自上而下分辨率逐渐降低、尺寸逐渐缩小。常见的图像金字塔分为高斯金字塔和拉普拉斯金字塔,前者负责图像缩放,后者负责保留缩放过程中的细节信息。
1. 高斯金字塔:图像缩放的核心
高斯金字塔通过"下采样"和"上采样"实现图像尺寸的缩小与放大,核心操作围绕cv2.pyrDown()和cv2.pyrUp()函数展开。
1.1 核心概念辨析
-
下采样:减小图像尺寸,分辨率降低。过程为"高斯模糊 → 隔行隔列取点",因此下采样后图像会丢失细节,无法完全复原。
-
上采样:增大图像尺寸,分辨率提升。过程为"插值放大 → 高斯模糊",放大后图像会出现模糊感,本质是补充的像素为估算值。
-
与resize的区别:resize是通用缩放工具,可自定义目标尺寸,无固定滤波规则;金字塔缩放遵循"每次尺寸减半/加倍"的规律,且绑定高斯滤波操作。
1.2 代码逐行解析
python
import cv2
import numpy as np # 用于数组裁剪,解决尺寸匹配问题
# 读取灰度图像(作为金字塔底层G0)
face = cv2.imread('img.png', cv2.IMREAD_GRAYSCALE)
h, w = face.shape # 记录原图尺寸,为后续裁剪做准备
cv2.imshow('face', face)
cv2.waitKey(0)
# 下采样:生成高斯金字塔G1、G2层
face_down_1 = cv2.pyrDown(face) # G1:尺寸为原图1/4(宽高各减半)
cv2.imshow('down_1', face_down_1)
cv2.waitKey(0)
face_down_2 = cv2.pyrDown(face_down_1) # G2:尺寸为G1的1/4
cv2.imshow('down_2', face_down_2)
cv2.waitKey(0)
# 上采样:放大图像
face_up_1 = cv2.pyrUp(face) # 放大为原图4倍
cv2.imshow('up_1', face_up_1)
cv2.waitKey(0)
# 关键问题:下采样后再上采样,尺寸不匹配且图像模糊
face_down_1_up = cv2.pyrUp(face_down_1) # G1上采样后尺寸比原图大
# 裁剪修复:保留与原图一致的区域(前h行、前w列)
face_down_1_up = face_down_1_up[:h, :w]
cv2.imshow('down_1_up', face_down_1_up)
cv2.waitKey(0)1.3 关键注意点
下采样后再上采样,图像尺寸会比原图略大(如G1上采样后尺寸为(2h, 2w)的近似值),必须通过数组裁剪匹配尺寸,否则后续计算会报错。裁剪逻辑为[:目标高度, :目标宽度]。
1.4运行结果
2. 拉普拉斯金字塔:细节保留与图像复原
拉普拉斯金字塔本身不直接生成,而是通过高斯金字塔推导得出,核心作用是保留图像缩放过程中丢失的细节(残差信息),可用于图像复原、融合等场景。
2.1 数学原理
拉普拉斯金字塔第i层(Li)的计算公式为: Li = 高斯金字塔第i层(Gi) - 高斯金字塔第i+1层上采样并裁剪后的数据 本质是用底层图像减去上层放大后的模糊图像,差值即为该层的细节信息。
2.2 代码实现与复原验证
python
# 构建拉普拉斯金字塔(尺寸已通过裁剪匹配)
L0 = face - face_down_1_up # 底层细节(G0与G1上采样的差值)
L1 = face_down_1 - face_down_2_up # 上层细节(G1与G2上采样的差值)
# 图像复原:细节 + 模糊图像 = 原始图像
fuyuan = face_down_1_up + L0
# 显示结果
cv2.imshow('L0', L0) # 细节图层(暗部为无变化区域,亮部为细节)
cv2.imshow('fuyuan', fuyuan) # 复原图像(与原图基本一致)
cv2.waitKey(0)
# 释放窗口资源(必写,避免内存泄漏)
cv2.destroyAllWindows()通过拉普拉斯金字塔复原的图像,虽因高斯滤波存在轻微模糊,但能最大程度保留原始图像的结构信息,这也是其在图像融合中广泛应用的核心原因。
2.3运行结果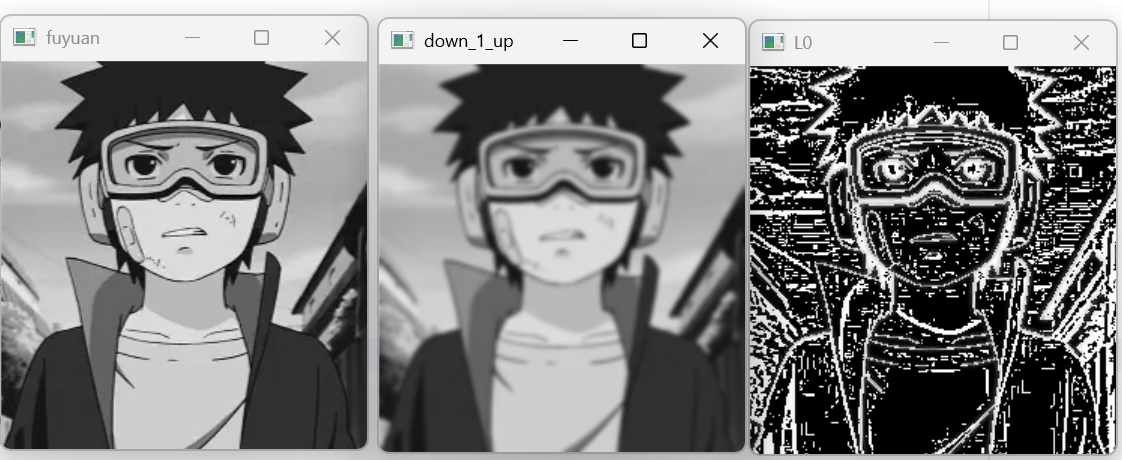
第三张图片就是第二张图片丢失的细节,把第二张和第三章图片合起来就能得到原图(第一张)。
二、直方图:图像像素分布的"指纹"
图像直方图描述了像素灰度值(或彩色通道值)的分布情况,通过直方图可快速判断图像对比度、亮度等特征。OpenCV中主要通过cv2.calcHist()计算直方图,结合matplotlib可视化。
1. 核心函数解析:cv2.calcHist()
函数语法:cv2.calcHist(images, channels, mask, histSize, ranges)
| 参数 | 说明 |
|---|---|
| images | 输入图像,需用列表包裹(如img),格式为uint8或float32 |
| channels | 通道索引,灰度图为0,彩色图B/G/R通道分别为0/1/2 |
| mask | 掩模图像,None表示统计整图,非None则仅统计掩模非0区域 |
| histSize | BINS数量(区间数),用列表包裹,如256表示每个灰度值一个区间 |
| ranges | 像素值范围,通常为0, 256(灰度值0-255) |
2. 常见直方图类型及实现
2.1 灰度图直方图
两种实现方式:matplotlib直接统计像素值,或OpenCV计算后可视化。
python
import cv2
import numpy as np
import matplotlib.pyplot as plt
# 读取灰度图
phone = cv2.imread('img_2.png', cv2.IMREAD_GRAYSCALE)
# 方式1:matplotlib hist函数(需转为一维数组)
a = phone.ravel() # 多维数组转一维,提取所有像素值
plt.hist(a, bins=256) # bins=256表示每个灰度值一个柱
plt.title('灰度图直方图(matplotlib)')
plt.show()
# 方式2:OpenCV calcHist函数
phone_hist = cv2.calcHist([phone], [0], None, [16], [0,256]) # 16个区间
plt.plot(phone_hist) # 绘制折线图(适合少区间场景)
plt.title('灰度图直方图(OpenCV,16 BINS)')
plt.show()结果: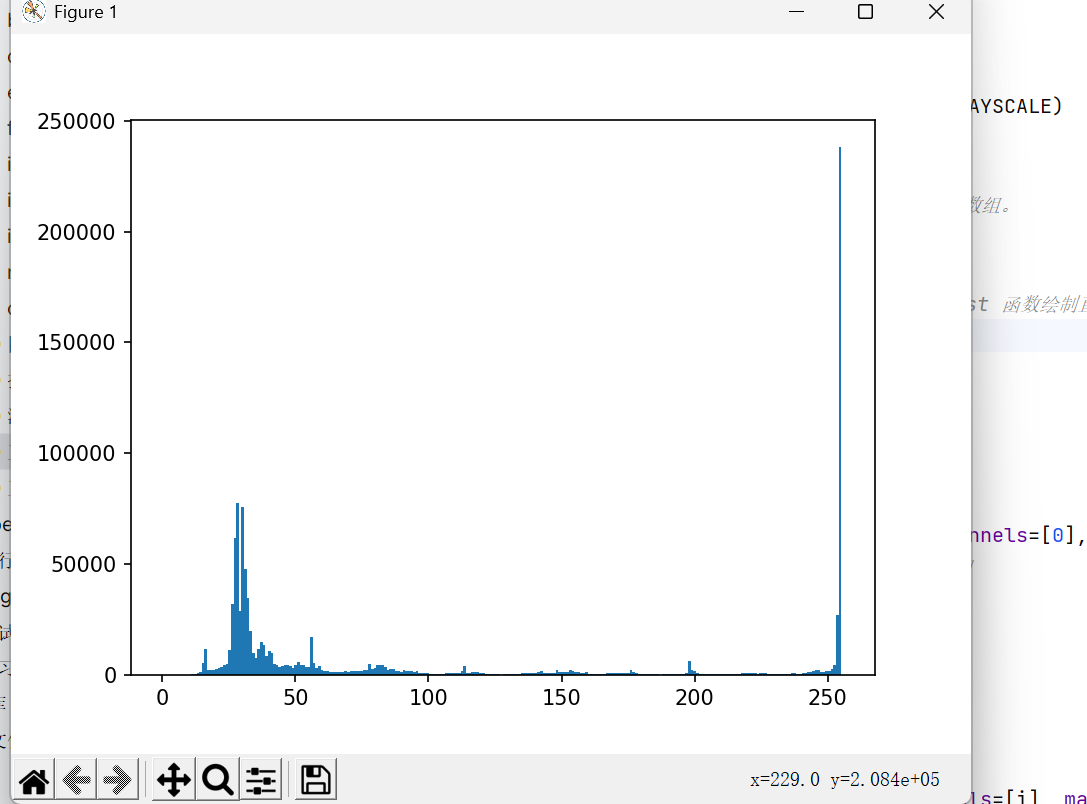
2. 掩模核心原理
通过cv2.bitwise_and()逻辑与运算实现区域筛选:掩模中像素值为0的区域,运算后结果为0(黑色);像素值为255的区域,保留原始图像像素值。本质是利用"1&1=1,1&0=0"的二进制运算规则,屏蔽不需要统计的区域。
代码:
python
# 什么是mask?掩膜
# mask参数如何使用?mask为掩模图像,先来看一下mask效果
# --------------------------
phone = cv2.imread('img_2.png', cv2.IMREAD_GRAYSCALE)
cv2.imshow('phone', phone)
cv2.waitKey(0)
# 创建黑白图像,用于制作mask
mask = np.zeros(phone.shape[:2], np.uint8)
mask[50:1000, 100:1500] = 255
cv2.imshow('mask', mask)
cv2.waitKey(0)
# cv2.bitwise_and(): 对图像(灰度图像或彩色图像均可)每个像素值进行二进制"与"操作,1&1=1,1&0=0,0&1=0,0&0=0
# bitwise_and(src1, src2, dst=None, mask=None)参数:
# src1、src2: 为输入图像或标量,标src1和src2相与。
# dst: 可选输出变量,如果需要使用非None则要先定义,且其大小与输入变量相同
# mask: 图像掩膜,可选参数,用于指定要更改的输出图像数组的元素,mask为0的值,src1和src2相与的值都为0。
# 非0的值,为src1和src2相与的值。
Phone_mask = cv2.bitwise_and(phone, phone, mask=mask)
cv2.imshow('phone_mask', Phone_mask)
cv2.waitKey(0)
# 计算带mask的直方图
phone_hist_mask = cv2.calcHist(images=[phone], channels=[0], mask=mask, histSize=[256], ranges=[0,256])
plt.plot(phone_hist_mask) # 使用calcHist的值绘制曲线图
plt.show()
# 释放窗口资源
cv2.destroyAllWindows()结果: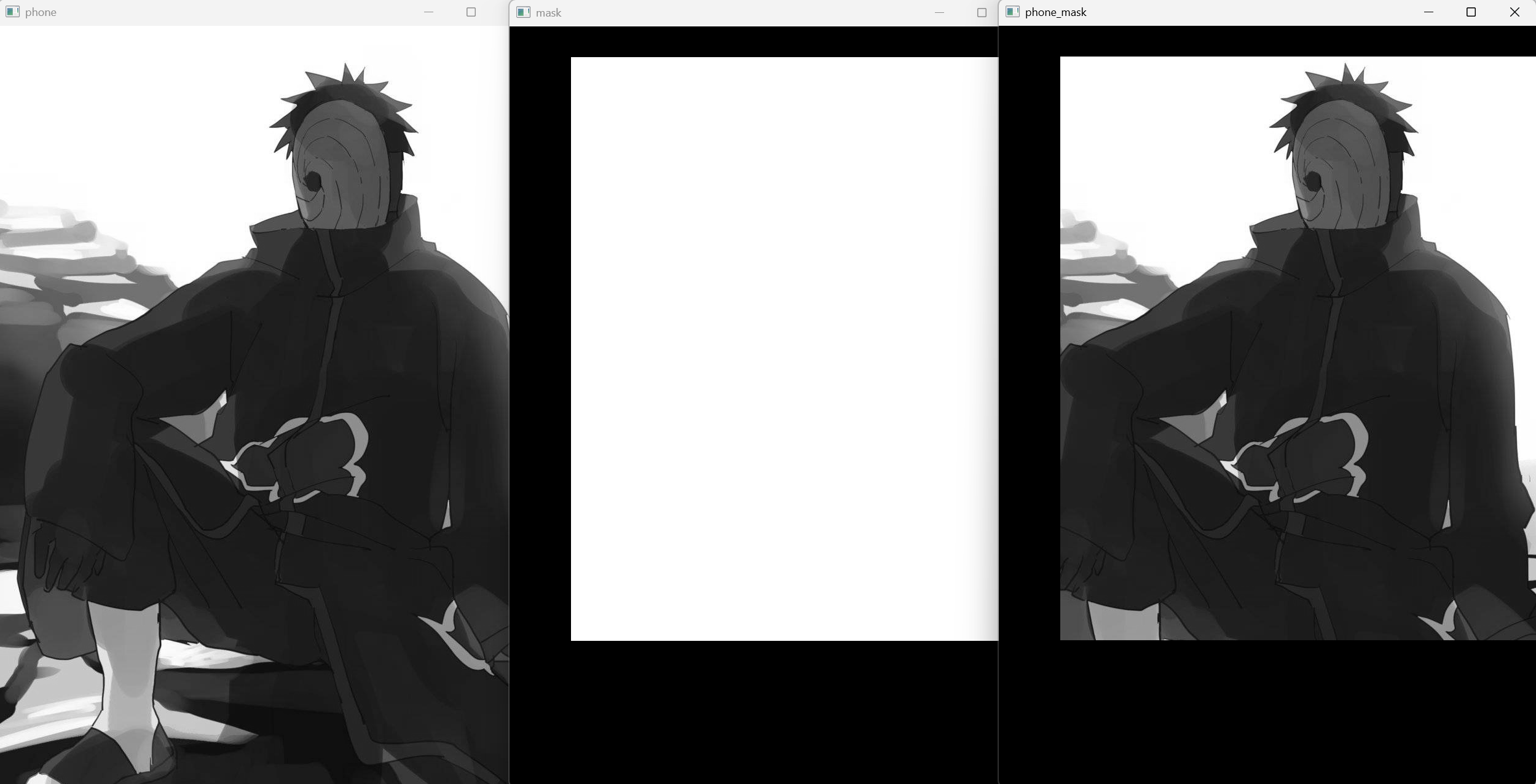
2.4 直方图均衡化:基于直方图的图像增强
直方图均衡化是经典的图像增强技术,核心是通过调整像素值分布,让图像灰度级均匀化,从而提升对比度、改善画面灰暗问题。OpenCV提供两种实现方式:普通直方图均衡化(全局调整)和自适应直方图均衡化(CLAHE,局部调整),后者能更好保留图像细节,避免全局均衡化导致的细节丢失。
2.4.1 普通直方图均衡化(全局)
通过cv2.equalizeHist()实现,仅支持单通道灰度图,操作简洁,适合整体曝光不足的图像,但对细节丰富的图像可能造成局部过曝。
python
import cv2
import numpy as np
import matplotlib.pyplot as plt
# 读取灰度图(替换为实际图像路径,此处用black.jpg示例)
black = cv2.imread(filename='black.jpg', cv2.IMREAD_GRAYSCALE)
# 绘制原始图像直方图
plt.hist(black.ravel(), bins=256) # ravel()将多维数组拉为一维,统计所有像素值
plt.title('原始图像直方图')
plt.show()
# 普通直方图均衡化核心操作
black_equalize = cv2.equalizeHist(black)
# 绘制均衡化后直方图
plt.hist(black_equalize.ravel(), bins=256)
plt.title('均衡化后图像直方图')
plt.show()
# 横向拼接原图与均衡化图,直观对比效果
res = np.hstack((black, black_equalize)) # 水平堆叠数组,保持尺寸一致
cv2.imshow(winname='普通均衡化对比', res)
cv2.waitKey(0) # 等待按键关闭窗口2.4.2 自适应直方图均衡化(CLAHE,局部)
普通均衡化对整幅图像全局调整,易导致明暗细节丢失。自适应均衡化(CLAHE)将图像分割为多个小区域(tiles),对每个区域单独均衡化,同时通过对比度限制避免局部过曝,更适合细节丰富的图像。
python
# 1. 创建CLAHE对象,配置参数
# clipLimit:对比度限制阈值(默认8),值越大对比度越强,需避免过曝
# tileGridSize:局部均衡化的模板尺寸(默认(8,8)),即图像分割为8x8个区域
clahe = cv2.createCLAHE(clipLimit=10, tileGridSize=(8, 8))
# 2. 对灰度图应用CLAHE局部均衡化
black_clahe = clahe.apply(black)
# 3. 横向拼接原图、普通均衡化图、CLAHE图,三方对比
res = np.hstack((black, black_equalize, black_clahe))
cv2.imshow(winname='均衡化效果对比(原图/普通/CLAHE)', res)
cv2.waitKey(0)
# 释放窗口资源,避免内存泄漏
cv2.destroyAllWindows()运行结果:
第一张是原图,第均衡化,第三张局部均衡化。下面给出第一张到第二张直方图的变化:
|----------------------------------------------------------------------------|----------------------------------------------------------------------------|
| 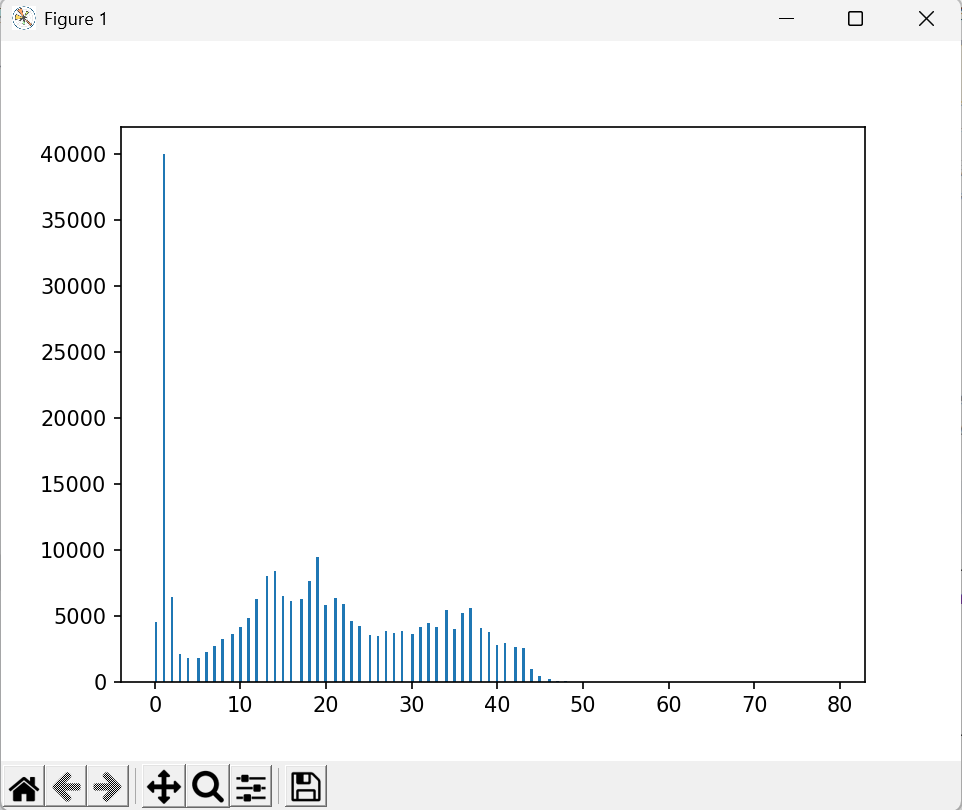 |
| 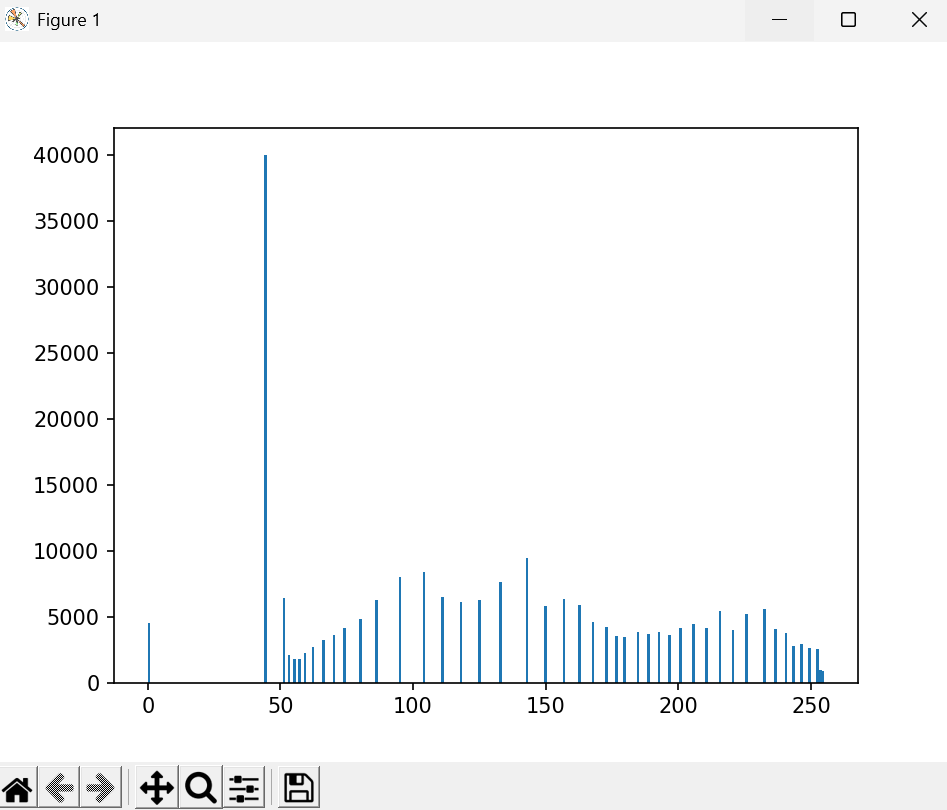 |
|
可以看到像素值由原本分布在50以内到分布到整个区间,这就是均衡化的效果,增加了图片对比度。
2.4.3 核心知识点与参数说明
-
函数限制:
cv2.equalizeHist()仅支持单通道灰度图,彩色图需先转换为HSV空间,对亮度(V通道)单独均衡化(见下文补充)。 -
CLAHE关键参数:
-
clipLimit:控制局部对比度上限,当区域内像素值差异过大时,超过阈值的部分会被裁剪,避免局部过曝或过暗。 -
tileGridSize:分割的区域尺寸,需根据图像分辨率调整,尺寸越小对细节的保留越精细,但计算耗时略增。
- 适用场景:普通均衡化适合简单低对比度图像;CLAHE适合风景、人像等细节丰富的图像,能在提升对比度的同时保留纹理、边缘等细节。
三、技术应用场景总结
-
图像金字塔:图像融合(如无缝拼接)、超分辨率重建、目标检测中的多尺度特征提取。
-
直方图:图像增强(如直方图均衡化)、阈值分割(根据像素分布确定阈值)、图像质量评估(对比度、亮度判断)。
以上就是图像金字塔与直方图的核心知识点与实操技巧,结合代码反复调试,能更深入理解两种技术的底层逻辑。后续可尝试将其结合,实现更复杂的图像处理任务(如基于直方图的金字塔图像增强)。
五、核心说明与技术延伸
1. 技术核心定位
图像金字塔与直方图均属于OpenCV基础操作模块,是高阶视觉任务的"基石"。OpenCV作为跨平台开源计算机视觉库,提供了这两类技术的优化接口(如cv2.pyrDown()、cv2.calcHist()),无需开发者从零实现底层算法,可直接用于科研原型验证或工业项目部署。二者的核心价值在于:
-
图像金字塔:打破单分辨率局限,让图像处理适配不同尺度需求,是多尺度特征提取、无缝融合的核心依赖。
-
直方图:将图像像素分布量化为直观数据,为"数据驱动型"图像处理提供依据,避免主观经验判断的偏差。
2. 与其他技术的联动
这两项技术并非孤立存在,在实际项目中常与其他视觉算法搭配使用:
-
金字塔+边缘检测:拉普拉斯金字塔提取的细节图层,可与Laplacian、Canny边缘检测算法结合,强化边缘特征的精准度,广泛应用于图像分割、目标轮廓提取。
-
直方图+图像增强:基于直方图分布的均衡化、规定化操作,可解决图像曝光不足、对比度低的问题,常作为人脸识别、目标检测的预处理步骤。
-
多技术协同:在YOLO等目标检测项目中,先用金字塔生成多尺度图像,再通过直方图优化图像对比度,最后输入模型提升检测精度,形成"预处理-特征提取-模型推理"的完整链路。
3. 实际开发注意事项
结合工程实践补充两点核心说明,帮助规避潜在问题:
-
性能权衡:高斯金字塔的下采样虽能缩小图像尺寸、提升后续操作速度,但细节丢失不可逆;直方图统计时,BINS数量越多精度越高,但计算耗时更长,需根据项目需求(速度/精度)灵活调整参数。
-
跨平台适配:OpenCV支持Windows、Linux、Mac等多系统,但不同平台下图像读取路径、窗口显示机制略有差异,建议使用绝对路径读取图像,同时封装窗口释放函数,提升代码可移植性。
掌握这两项基础技术的核心逻辑与联动方式,能为后续深入计算机视觉领域(如图像分割、目标跟踪、图像修复)奠定坚实基础。