
- 后端优化理论基础
1.1 最大后验估计与最小二乘
· MAP估计:

· 最小二乘形式:

1.2 图优化模型
· 因子图表示:
里程计约束 里程计约束 回环约束 观测约束 观测约束 位姿1 位姿2 位姿3 路标1
1.3 优化方法对比

- g2o优化框架实战
2.1 g2o架构解析
OptimizableGraph Vertex Edge OptimizationAlgorithm Solver LinearSolver
2.2 自定义顶点与边
cpp
// 位姿顶点定义
class VertexPose : public g2o::BaseVertex<6, SE3> {
public:
EIGEN_MAKE_ALIGNED_OPERATOR_NEW
virtual void setToOriginImpl() { _estimate = SE3(); }
virtual void oplusImpl(const double* update) {
Eigen::Map<const Vector6d> v(update);
_estimate = SE3::exp(v) * _estimate;
}
};
// 位姿-位姿边定义
class EdgePosePose : public g2o::BaseBinaryEdge<6, SE3, VertexPose, VertexPose> {
public:
EIGEN_MAKE_ALIGNED_OPERATOR_NEW
void computeError() {
const VertexPose* v1 = static_cast<VertexPose*>(_vertices[0]);
const VertexPose* v2 = static_cast<VertexPose*>(_vertices[1]);
SE3 error = _measurement.inverse() * v1->estimate().inverse() * v2->estimate();
_error = error.log();
}
};2.3 优化流程实现
cpp
void optimizePoseGraph(const vector<Pose>& poses, const vector<Constraint>& constraints) {
// 创建优化器
g2o::SparseOptimizer optimizer;
optimizer.setVerbose(true);
// 配置求解器
auto linearSolver = g2o::make_unique<g2o::LinearSolverCholmod<g2o::BlockSolverX::PoseMatrixType>>();
auto blockSolver = g2o::make_unique<g2o::BlockSolverX>(std::move(linearSolver));
g2o::OptimizationAlgorithmLevenberg* algorithm =
new g2o::OptimizationAlgorithmLevenberg(std::move(blockSolver));
optimizer.setAlgorithm(algorithm);
// 添加顶点
vector<VertexPose*> vertices;
for (size_t i = 0; i < poses.size(); ++i) {
VertexPose* v = new VertexPose();
v->setId(i);
v->setEstimate(poses[i]);
optimizer.addVertex(v);
vertices.push_back(v);
}
// 添加边
for (const auto& c : constraints) {
EdgePosePose* edge = new EdgePosePose();
edge->setVertex(0, vertices[c.id1]);
edge->setVertex(1, vertices[c.id2]);
edge->setMeasurement(c.T);
edge->setInformation(c.info);
optimizer.addEdge(edge);
}
// 执行优化
optimizer.initializeOptimization();
optimizer.optimize(10);
}- Ceres优化库实战
3.1 自动微分原理
· 前向模式:
· 反向模式:
3.2 位姿图优化实现
cpp
struct PoseGraphCostFunction {
PoseGraphCostFunction(const SE3& measurement, const Matrix6d& sqrt_info)
: measurement_(measurement), sqrt_info_(sqrt_info) {}
template <typename T>
bool operator()(const T* const pose1, const T* const pose2, T* residuals) const {
// 转换位姿
SE3<T> T1(pose1), T2(pose2);
SE3<T> relative = measurement_.cast<T>();
// 计算残差
SE3<T> error = relative.inverse() * T1.inverse() * T2;
Eigen::Map<Vector6<T>> res(residuals);
res = error.log();
// 加权残差
res = sqrt_info_.cast<T>() * res;
return true;
}
private:
SE3 measurement_;
Matrix6d sqrt_info_;
};
void AddPoseConstraint(const SE3& measurement, const Matrix6d& info,
double* pose1, double* pose2, ceres::Problem* problem) {
// 计算平方根信息矩阵
Matrix6d sqrt_info = info.llt().matrixL().transpose();
// 添加残差块
ceres::CostFunction* cost =
new ceres::AutoDiffCostFunction<PoseGraphCostFunction, 6, 7, 7>(
new PoseGraphCostFunction(measurement, sqrt_info));
problem->AddResidualBlock(cost, nullptr, pose1, pose2);
}3.3 优化效果对比

- 滑动窗口优化
4.1 窗口管理策略
· 关键帧选择标准:
- 平移量 > 场景直径的15%
- 旋转量 > 30度
- 跟踪特征数 < 阈值
4.2 边缘化原理
· 舒尔补操作:
边缘化x₂:

4.3 先验因子实现
cpp
class MarginalizationFactor : public ceres::CostFunction {
public:
MarginalizationFactor(const MatrixXd& H_marg, const VectorXd& b_marg)
: H_marg_(H_marg), b_marg_(b_marg) {
set_num_residuals(b_marg.size());
mutable_parameter_block_sizes()->push_back(6); // 位姿维度
}
virtual bool Evaluate(double const* const* parameters,
double* residuals,
double** jacobians) const {
// 残差计算
Eigen::Map<VectorXd> res(residuals, b_marg_.size());
res = H_marg_ * Eigen::Map<const Vector6d>(parameters[0]) - b_marg_;
// 雅可比计算
if (jacobians && jacobians[0]) {
Eigen::Map<MatrixXd> J(jacobians[0], H_marg_.rows(), 6);
J = H_marg_;
}
return true;
}
private:
MatrixXd H_marg_;
VectorXd b_marg_;
};- IMU预积分与约束
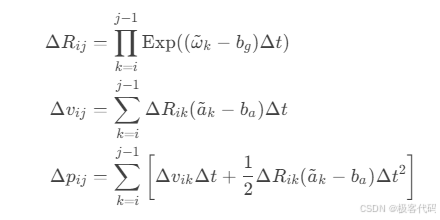
5.1 IMU预积分理论
· 预积分量:
5.2 预积分协方差传播
· 误差状态方程:
· 协方差递推:
5.3 IMU因子实现
cpp
class IMUFactor : public ceres::SizedCostFunction<15, 7, 9, 7, 9> {
public:
IMUFactor(const IntegrationBase& preint) : preint_(preint) {}
virtual bool Evaluate(double const* const* parameters,
double* residuals,
double** jacobians) const {
// 解析参数
Eigen::Map<const Vector7d> Pi(parameters[0]); // T_wb_i
Eigen::Map<const Vector9d> Vi(parameters[1]); // [v_i, bg_i, ba_i]
Eigen::Map<const Vector7d> Pj(parameters[2]); // T_wb_j
Eigen::Map<const Vector9d> Vj(parameters[3]); // [v_j, bg_j, ba_j]
// 计算残差
Eigen::Map<Vector15d> res(residuals);
res = preint_.evaluate(Pi, Vi, Pj, Vj);
// 计算雅可比
if (jacobians) {
double* jacobians[4];
preint_.computeJacobians(jacobians, parameters);
}
return true;
}
private:
IntegrationBase preint_;
};- 鲁棒核函数与异常处理
6.1 鲁棒核函数对比
核函数 公式 特点
Huber $\rho(s) = \begin{cases} s & s
Cauchy ρ(s)=δ22log(1+sδ2)\rho(s) = \frac{\delta^2}{2} \log(1 + \frac{s}{\delta^2})ρ(s)=2δ2log(1+δ2s) 重尾分布
Tukey $\rho(s) = \begin{cases} (1 - (1 - s2/\delta2)^3) \frac{\delta^2}{6} & s
6.2 自适应核函数策略
cpp
void applyRobustKernel(ceres::Problem& problem, double threshold) {
// 遍历所有残差块
vector<ceres::ResidualBlockId> residual_blocks;
problem.GetResidualBlocks(&residual_blocks);
for (auto& block_id : residual_blocks) {
// 获取残差大小
ceres::CostFunction* cost;
ceres::LossFunction* loss;
vector<double*> params;
problem.GetCostFunctionForResidualBlock(block_id, &cost, &loss, ¶ms);
// 计算当前残差
vector<double> residuals(cost->num_residuals());
cost->Evaluate(params.data(), residuals.data(), nullptr);
double sq_norm = 0;
for (double r : residuals) sq_norm += r * r;
// 自适应选择核函数
if (sq_norm > 4 * threshold * threshold) {
problem.SetParameterization(block_id,
new ceres::TukeyLoss(threshold));
} else if (sq_norm > threshold * threshold) {
problem.SetParameterization(block_id,
new ceres::HuberLoss(threshold));
}
}
}6.3 异常检测机制
python
def detect_outliers(residuals, threshold=3.0):
"""基于马氏距离的异常检测"""
# 计算残差统计
mean = np.mean(residuals, axis=0)
cov = np.cov(residuals.T)
# 计算马氏距离
inv_cov = np.linalg.inv(cov)
mahalanobis = np.array([
(r - mean) @ inv_cov @ (r - mean).T for r in residuals
])
# 检测异常
inliers = mahalanobis < threshold * threshold
return inliers- 实例:大规模场景优化
7.1 问题场景
· 数据集:KITTI 00序列 (4km)
· 挑战:
· 累积误差 > 50m
· 动态物体干扰
· 实时性要求
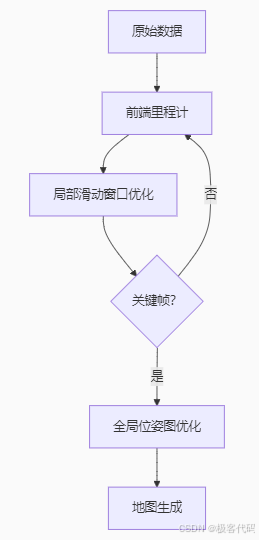
7.2 分层优化架构
7.3 优化策略对比

7.4 内存优化技巧
cpp
class SparseBlockMatrix {
public:
// 添加块
void addBlock(int i, int j, const MatrixXd& block) {
auto key = std::make_pair(i, j);
if (blocks_.find(key) == blocks_.end()) {
blocks_[key] = MatrixXd::Zero(block.rows(), block.cols());
}
blocks_[key] += block;
}
// 舒尔补操作
void schurComplement(int eliminate_index) {
// 提取被消元块
auto diag_block = blocks_[{eliminate_index, eliminate_index}];
LDLT<MatrixXd> ldlt(diag_block);
// 更新相关块
for (auto& block : blocks_) {
if (block.first.first != eliminate_index &&
block.first.second != eliminate_index) {
// 更新公式: H' = H_ab - H_ae * H_ee^{-1} * H_eb
MatrixXd H_ae = blocks_[{block.first.first, eliminate_index}];
MatrixXd H_eb = blocks_[{eliminate_index, block.first.second}];
block.second -= H_ae * ldlt.solve(H_eb);
}
}
// 移除被消元块
removeBlock(eliminate_index);
}
};- 前沿进展:实时大规模优化
8.1 增量平滑与建图 (iSAM2)
· 贝叶斯树:
https://ai-studio-static-online.cdn.bcebos.com/bayes_tree.png
· 增量更新:

8.2 多线程优化
cpp
class ParallelOptimizer {
public:
void optimize(int num_threads) {
// 分割子图
vector<SubGraph> subgraphs = partition_graph();
// 并行优化
vector<thread> threads;
for (int i=0; i<num_threads; ++i) {
threads.emplace_back([&, i](){
optimize_subgraph(subgraphs[i]);
});
}
// 合并结果
for (auto& t : threads) t.join();
merge_results(subgraphs);
}
};8.3 GPU加速优化
· 雅可比矩阵并行计算:
cuda
__global__ void compute_jacobian_kernel(double* params, double* jacobians) {
int idx = blockIdx.x * blockDim.x + threadIdx.x;
// 每个线程计算一个残差项的雅可比
// ...
}· 海森矩阵并行分解:
使用cuSOLVER进行Cholesky分解
关键理论总结
- 图优化模型:因子图表示与最小二乘求解
- 优化框架:g2o/Ceres的工程实现
- 滑动窗口:边缘化与先验信息
- IMU预积分:预积分量与协方差传播
- 鲁棒优化:自适应核函数策略
下篇预告:第六篇:视觉惯性里程计(VIO)------动态系统的融合艺术
将深入讲解:
· IMU误差模型与标定
· 松耦合与紧耦合架构
· 基于优化的MSCKF
· VINS-Mono系统解析