前言
好久没学习无人机路径规划方面东西了,最近在看目标检测,真的很难改动哈哈。
github上刷到了这个来试一下吧,还没看论文,直接上手看一下效果,之后描述论文,话说路径规划可以有创新方向不
介绍
A novel localization-aware planner for quadrotor flight in unknown and feature-limited environments that properly allocates perception resources among environmental information during navigation. It tackles the issue of strong dependency on prior environmental knowledge inherent in traditional localization-aware planning methods.
这个路径规划针对未知且特征受限环境开发的,这类环境强烈依赖于先验环境知识在之前的路径规划方法里。
部署
安装库,这个我之前安装过,就不安装了
bash
git clone -b v2.7.1 https://github.com/stevengj/nlopt.git
cd nlopt
mkdir build
cd build
cmake ..
make
sudo make install
bash
sudo apt install libarmadillo-dev建立工作空间克隆代码
bash
mkdir -p la-planner/src
cd la-planner/src
git clone https://github.com/Robotics-STAR-Lab/LA-Planner.git
cd ..
catkin_make -DCMAKE_BUILD_TYPE=Release运行
bash
source devel/setup.bash
roslaunch exploration_manager run_map1.launch rviz:=true auto_trigger:=true这里有3种地图可以显示,地图3是长廊环境更加复杂
如果需要自己点击导航
bash
source devel/setup.bash
roslaunch exploration_manager run_map1.launch rviz:=true auto_trigger:=false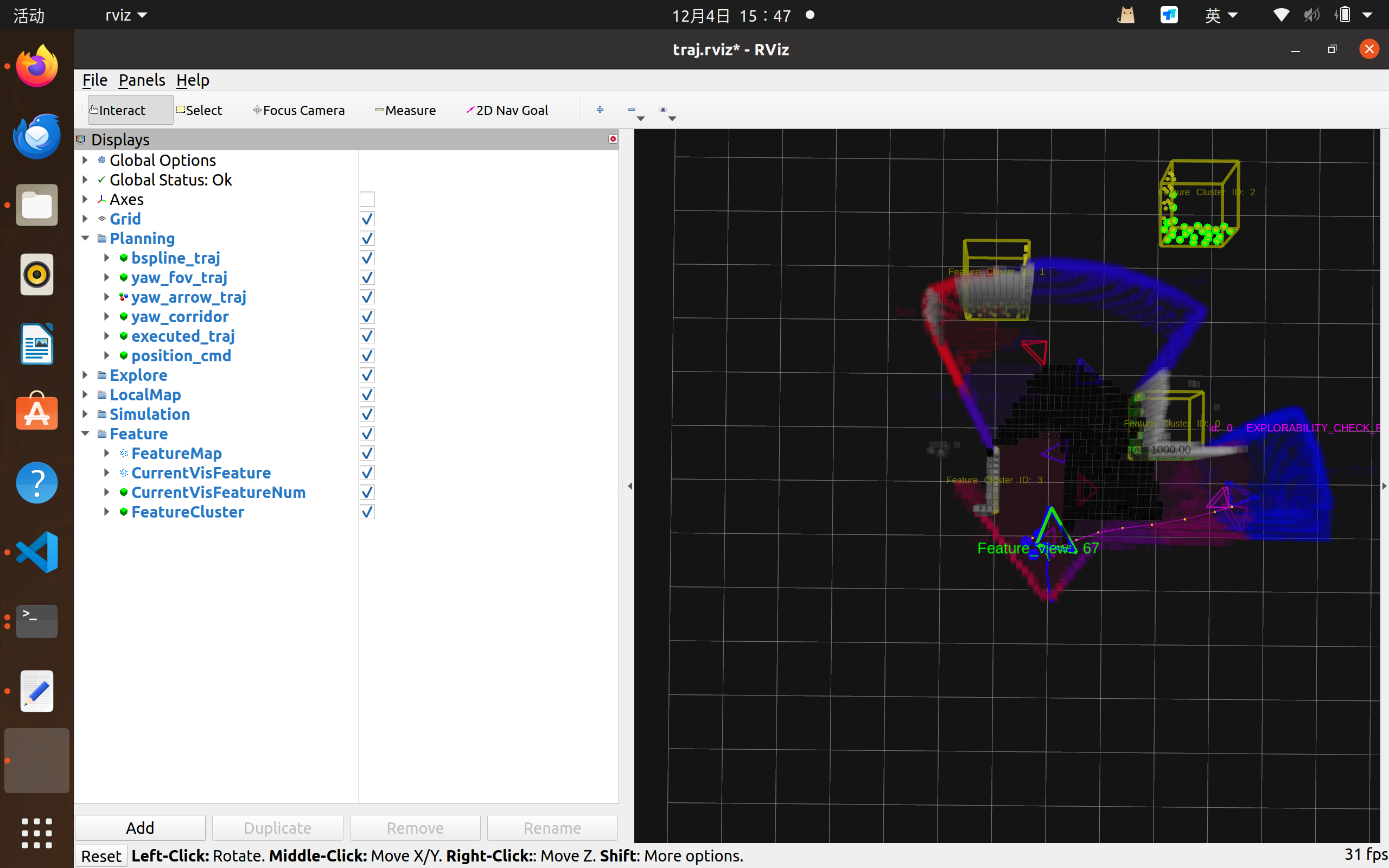
所以现在有一个问题了,怎么部署在gazebo仿真运行呢,之后继续研究