目录
1.摘要
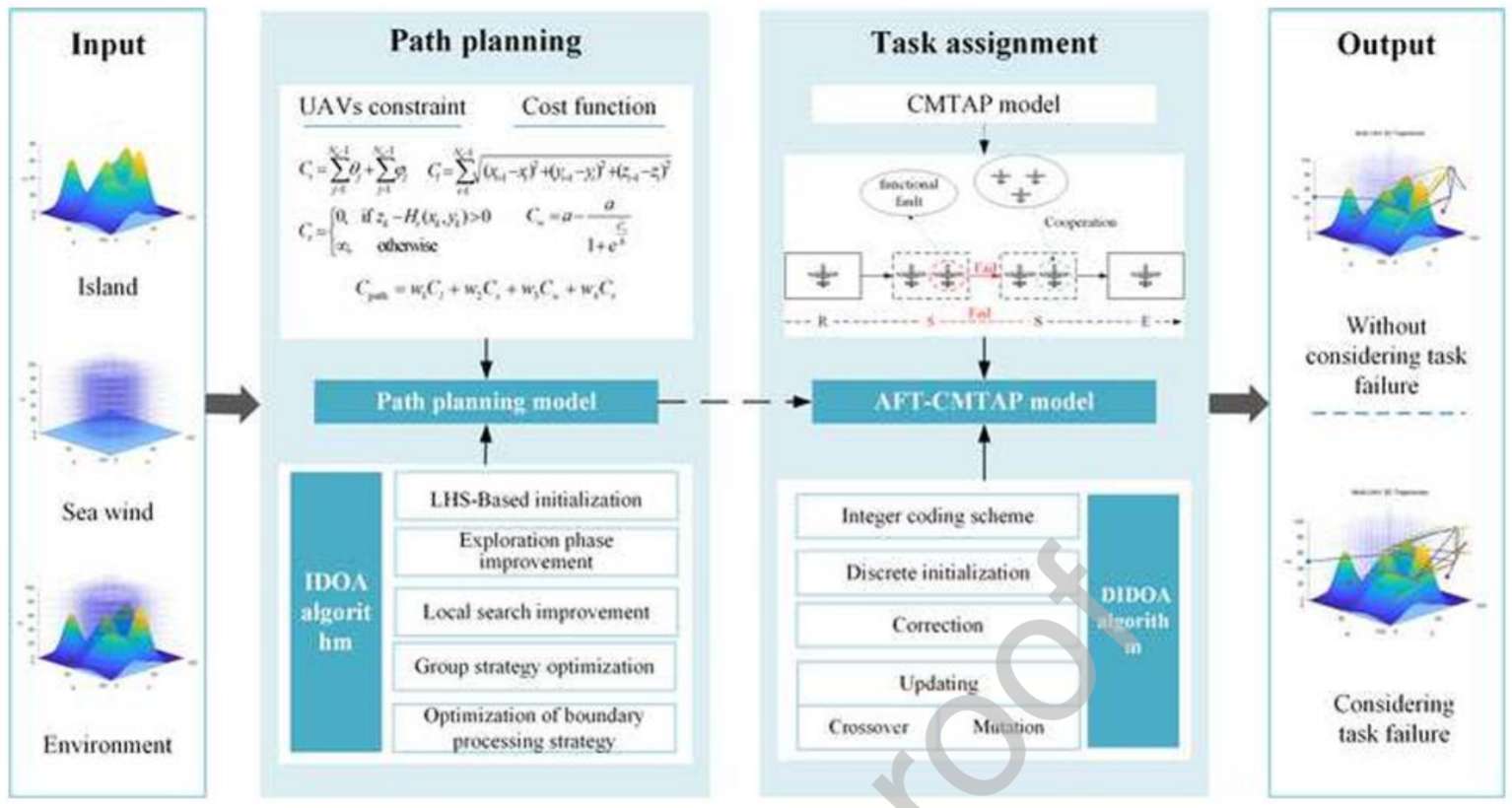
针对复杂海上救援环境中多无人机协同在非线性约束和任务不确定失效下的局限性,本文提出一种双阶段协同优化框架。第一阶段采用改进梦境优化算法(IDOA),通过引入差分进化扰动和局部记忆机制,提高复杂风场与地形环境下路径规划的全局搜索能力与鲁棒性;第二阶段构建自适应容错协同多任务分配模型(AFT-CMTAP),并设计离散梦境优化算法(DIDOA)求解组合分配问题,该框架支持基于实时风险评估的在线重规划与资源自适应调度,在故障条件下保障任务连续性与系统可靠性。
2.优化框架与数学模型
本文将异构多无人机路径规划与任务分配的组合优化问题划分为两个核心模块:路径规划与任务分配。路径规划基于三维海上环境模型,采用改进IDOA算法,在环境约束下为各无人机生成最短可行路径;任务分配基于扩展的自适应容错协同多任务分配模型(AFT-CMTAP),以路径成本矩阵为输入,利用离散DIDOA算法进行多约束优化分配。
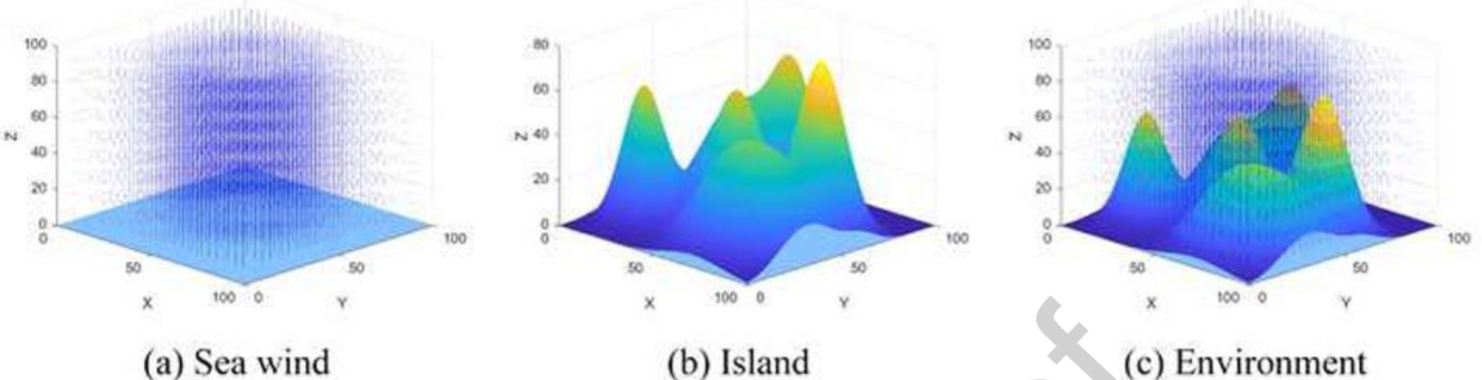
环境模型
采用 Lamb-Oseen 涡旋函数 模拟海风场,刻画风速在水平、纵向与垂直方向的空间分布及演化特性:
V x w i n d ( r ) = − λ ( y − y 0 ) 2 π r 2 1 − e − r 2 ζ 2 V_x^{wind}(r)=-\frac{\lambda(y-y_0)}{2\pi r^2}\left1-e\^{-\\frac{r\^2}{\\zeta\^2}}\\right Vxwind(r)=−2πr2λ(y−y0)1−e−ζ2r2
V y w i n d ( r ) = λ ( x − x 0 ) 2 π r 2 1 − e − r 2 ζ 2 V_y^{wind}(r)=\frac{\lambda(x-x_0)}{2\pi r^2}\left1-e\^{-\\frac{r\^2}{\\zeta\^2}}\\right Vywind(r)=2πr2λ(x−x0)1−e−ζ2r2
V z w i n d ( r ) = 0 V_z^{wind}(r)=0 Vzwind(r)=0
岛屿地形采用多峰高斯函数建模:
z ( x , y ) = ∑ i = 1 N p h i exp − ( ( x − x i ) 2 l x i 2 + ( y − y i ) 2 l y i 2 ) z(x,y)=\sum_{i=1}^{N_p}h_i\exp\left-\\left(\\frac{(x-x_i)\^2}{l_{x_i}\^2}+\\frac{(y-y_i)\^2}{l_{y_i}\^2}\\right)\\right z(x,y)=i=1∑Nphiexp−(lxi2(x−xi)2+lyi2(y−yi)2)
任务分配模型
本文提出自适应容错协同多任务分配模型(AFT-CMTAP),在传统CMTAP基础上引入任务失效概率与动态重分配机制,综合考虑无人机能力差异、任务时序约束、时间窗限制及协同安全距离,实现多阶段任务的有序执行与故障情况下的实时调整。通过同时优化任务完成时间与协同安全成本,提升了多无人机系统在复杂动态环境中的鲁棒性与整体任务执行效率。
3.提出的算法
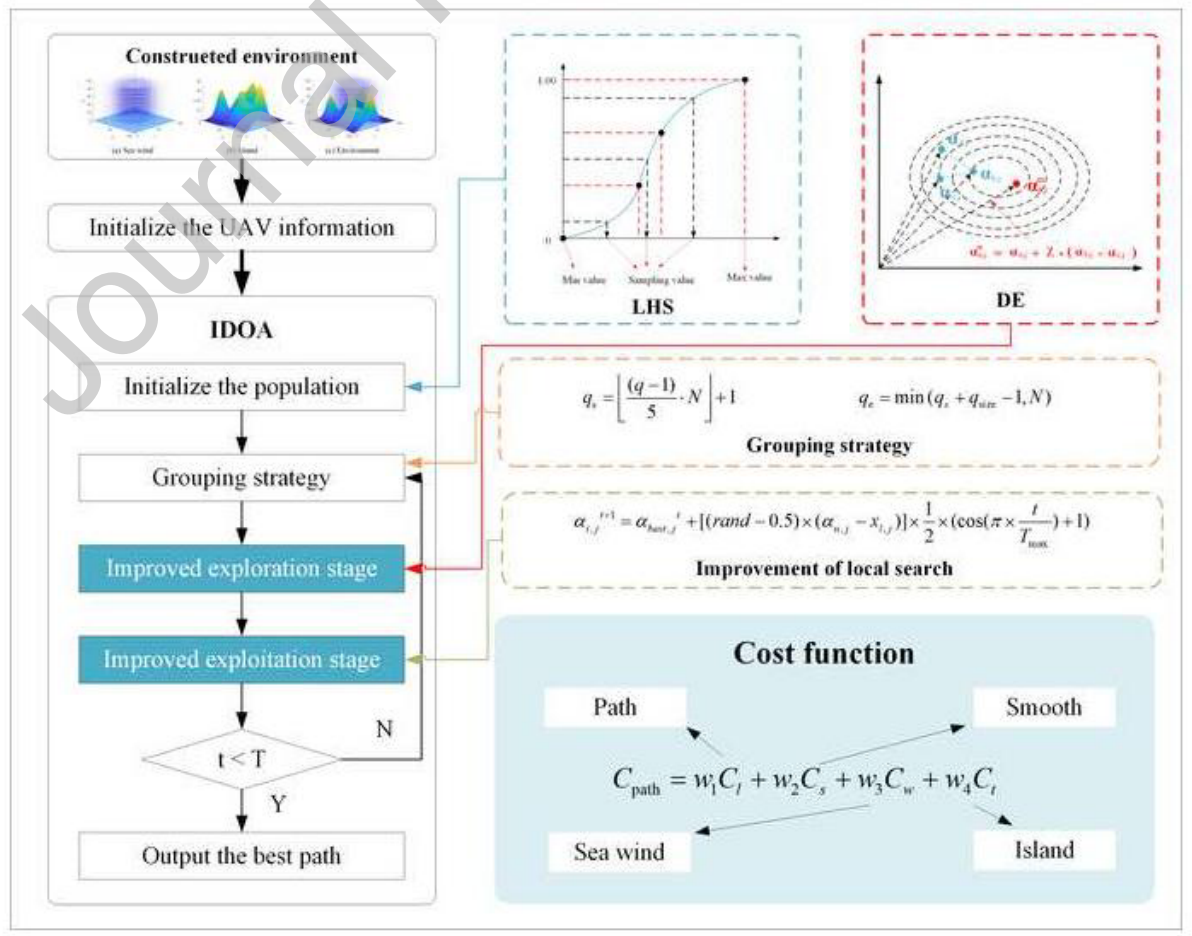
多无人机路径规划
基于 DIDOA 的任务分配
DIDOA算法采用离散染色体编码表示目标、任务类型与无人机分配关系,并在初始化与迭代过程中引入多重约束修正机制,确保满足无人机能力约束、协同数量要求、任务时序与时间窗限制以及故障情况下的可行性。
任务分配基于路径规划生成的成本矩阵进行优化,目标函数综合任务完成时间与协同安全成本:
C = T t + C d C=T_t+C_d C=Tt+Cd
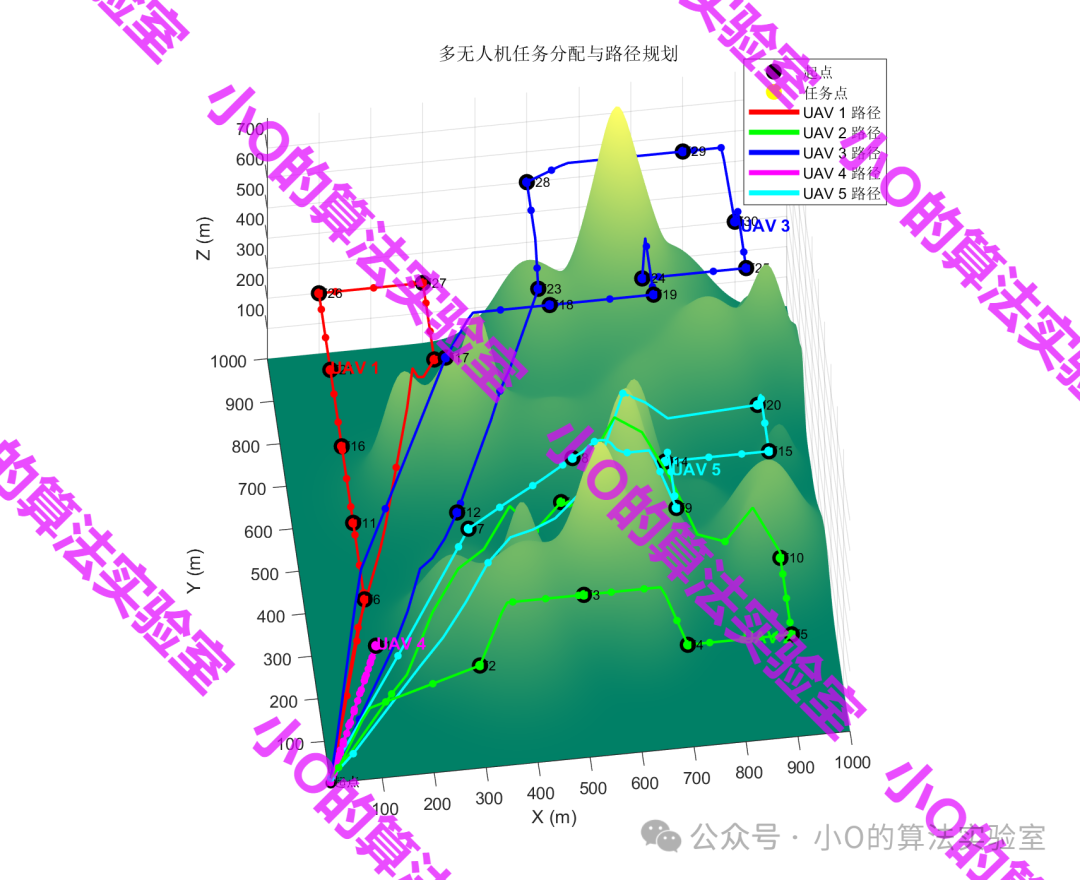
4.结果展示
5.参考文献
1 Hong Y, Wu Q. Dual-stage collaborative path planning and task allocation for UAV swarms in complex maritime rescue environmentsJ. Reliability Engineering & System Safety, 2025: 111974.
6.代码获取
xx
7.算法辅导·应用定制·读者交流
xx