目录
1.摘要
本文研究了一种具有随机速度和时间窗的异构无人机协同多任务分配组合优化问题,并将其建模为两阶段随机规划模型。为贴近实际作战任务场景,模型综合考虑了运动学约束、资源约束(机载武器与燃料)以及时间约束(任务执行顺序与时间窗)。针对该问题计算复杂度高、求解困难的特点,本文提出了一种基于改进遗传算法以提高解的搜索质量与收敛效率。在获得可行任务分配方案后,通过路径协调过程生成满足任务优先级和时间约束的实际飞行路径。
2.问题描述
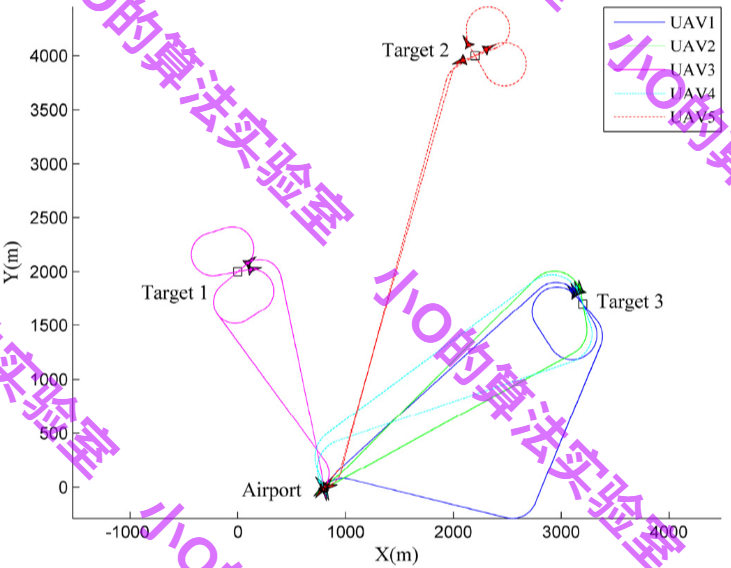
论文构建了异构固定翼无人机协同执行多目标、多任务的应用场景,并建立了具有随机速度和时间窗的协同多任务分配模型(CMTAPSVTW)。针对复杂环境和飞行不确定性,引入随机飞行速度以更真实地刻画任务执行过程,并假设无人机通过高度分层实现无碰撞飞行。
模型中根据目标重要性设置不同任务需求,每个目标对应由识别、攻击和验证组成的有序任务集,重要目标需由两架不同无人机同时完成双重攻击。无人机根据能力差异分为作战型、侦察型和弹药型,其可执行任务受能力、武器数量和最大飞行时间等资源约束限制。返回机场被统一建模为验证任务。
在建模方法上,采用 Dubins 车辆模型描述无人机运动学特性,并将实际飞行速度表示为理想速度与随机扰动之和。通过离散化航向角构建有向图,将问题表述为带追索决策的随机规划组合优化问题,同时引入软时间窗与惩罚机制,以提升模型在不确定环境下的鲁棒性。
由于随机飞行速度的影响,任务执行时间、总飞行时间及惩罚成本均具有不确定性。为有效刻画和处理这种随机性,论文采用两阶段随机规划(追索模型)对 CMTAPSVTW 进行建模。第一阶段确定任务分配方案,第二阶段在随机扰动下执行任务并产生相应惩罚。模型以最小化所有无人机最大飞行时间与各类惩罚成本的期望值为目标:
min J = max u ∈ U { ∑ k = 1 N k ∑ j = 1 N V ∑ i = 1 N V X ( v i , v j ) u , k t i j u } + E ( P 1 ) + E ( P 2 ) + E ( P 3 ) \begin{aligned}\min J&=\max_{u\in\mathbf{U}}\left\{\sum_{k=1}^{N_{k}}\sum_{j=1}^{N_{V}}\sum_{i=1}^{N_{V}}X_{(v_{i},v_{j})}^{u,k}t_{ij}^{u}\right\}\\&+E(P_{1})+E(P_{2})+E(P_{3})\end{aligned} minJ=u∈Umax{k=1∑Nkj=1∑NVi=1∑NVX(vi,vj)u,ktiju}+E(P1)+E(P2)+E(P3)
3.改进遗传算法
编码方案
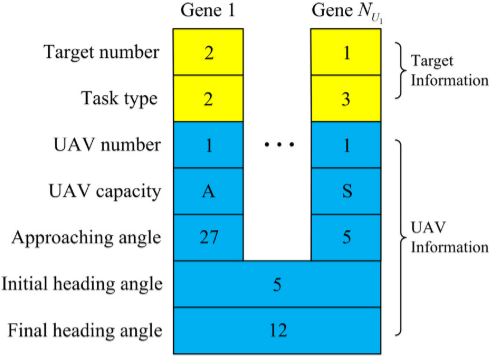
将每个任务分配方案编码为一条染色体,并按无人机划分为多个子染色体。每个子染色体采用准矩阵结构表示,其基因顺序对应无人机执行任务的先后顺序。
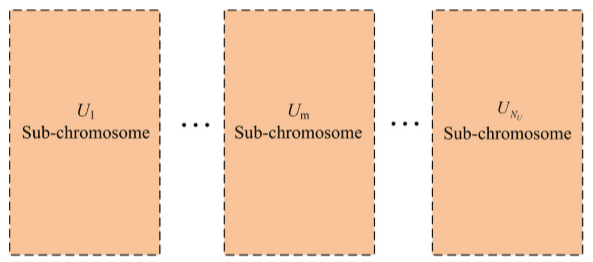
单个基因同时包含目标编号、任务类型、无人机编号与能力、目标接近角以及无人机初始和终止航向角等关键信息,相关角度均采用离散化表示。各子染色体按无人机编号排序并组合成完整染色体,以确保解在搜索空间中的唯一性和遗传操作的有效性。
初始化
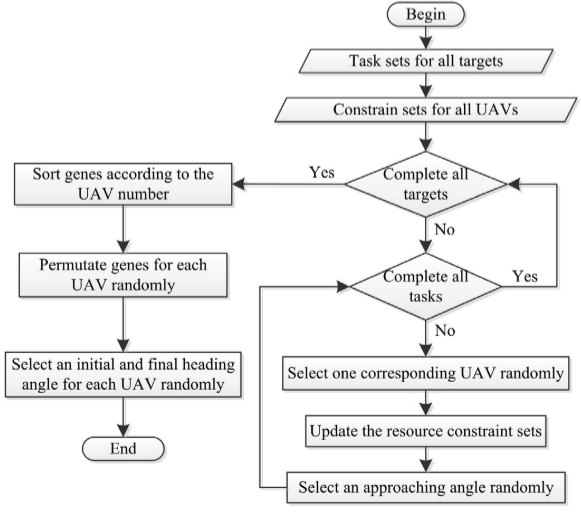
在明确各目标的任务集合及无人机资源约束后,算法首先根据任务类型随机选择具备相应能力的无人机执行任务,并同步更新其资源状态;随后为每个任务随机生成目标接近角,并据此构造无人机的 Dubins 飞行路径。在完成全部任务分配后,按照使用的无人机编号对任务分配结果进行排序,并对每架无人机的任务执行顺序进行随机排列,最后随机确定无人机的初始与终止航向角。
GA算子
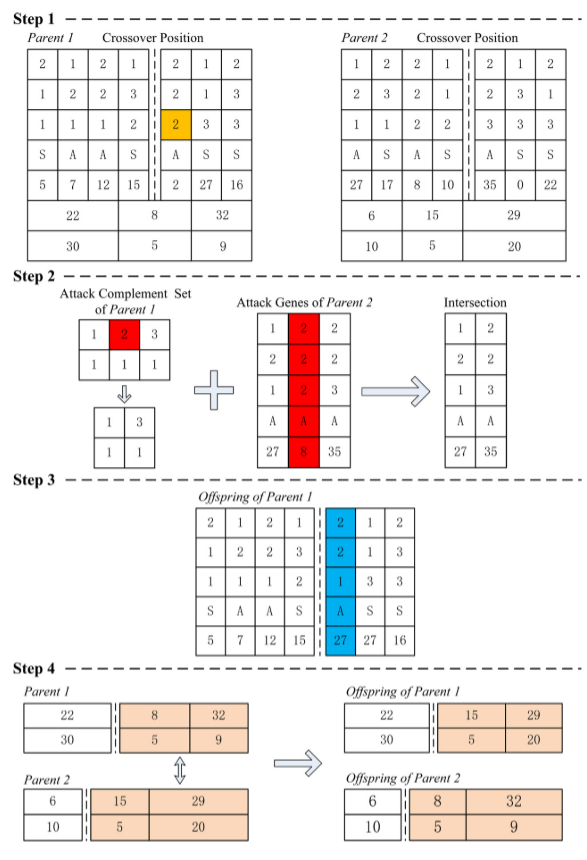
叉算子采用轮盘赌选择与单点交叉方式,在满足无人机能力和资源约束的前提下生成可行子代,并同步处理航向角信息;变异算子通过更换执行无人机、调整任务顺序、改变接近角及航向角等方式保持种群多样性并避免陷入局部最优。算法在精英保留策略下进行固定代数的迭代进化。针对任务先后约束导致的自锁和互锁等死锁问题,采用基因换位重排无人机任务顺序的方法进行解锁,从而确保生成解的可行性。
路径生成与协调
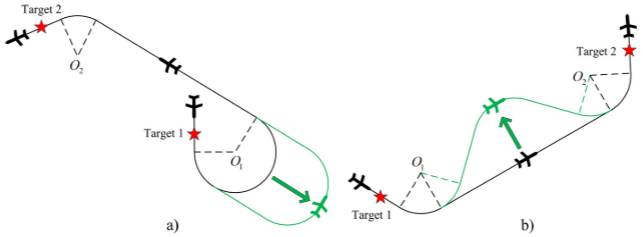
本节提出了一种基于 Dubins 车辆模型的路径生成与协调方法,以确保任务分配结果在运动学和任务先后约束下可实际执行。首先为每架无人机生成满足最小转弯半径约束的基础 Dubins 飞行路径。随后针对不同无人机速度差异可能导致的任务时序冲突,通过路径协调调整无人机到达时间。
4.结果展示
5.参考文献
1 Jia Z, Yu J, Ai X, et al. Cooperative multiple task assignment problem with stochastic velocities and time windows for heterogeneous unmanned aerial vehicles using a genetic algorithmJ. Aerospace Science and Technology, 2018, 76: 112-125.
6.代码获取
xx
7.算法辅导·应用定制·读者交流
xx